
Fターム[2F065DD03]の内容
光学的手段による測長装置 (194,290) | 目的 (6,263) | 分解能向上 (726)
Fターム[2F065DD03]に分類される特許
81 - 100 / 726
走査型検出測定装置、及び測定方法
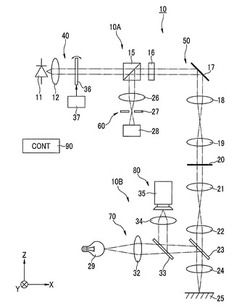
【課題】簡素な構成を採用しつつ検出光量ムラの発生を抑制可能とした走査型検出測定装置を提供する。
【解決手段】本発明の走査型検出測定装置は、レーザ光を射出する発光素子と、発光素子から供給されるレーザ光を走査しつつ標本に照射する走査光学系と、標本から生じる光を検出する検出光学系と、発光素子と走査光学系との間に設けられレーザ光の一部を発光素子に向けて反射させる反射光学素子と、を有することを特徴とする。
(もっと読む)
角度測定方法及び角度測定システム

【課題】回転角度を高精度且つ短時間で測定すること。
【解決手段】回転が規制された非回転体であるエンコーダ本体2aと、エンコーダ本体2aに回転自在に軸支された回転体である回転軸3とを有し、エンコーダ本体2aに対する回転軸3の相対的な回転角度を検出する相対的角度検出手段としてのロータリエンコーダ2と、エンコーダ本体2aの絶対的な回転角度を検出する絶対角度検出手段としての非接触角度検出手段20とを備える。これにより、ロータリエンコーダ2が検出した回転角度を、非接触角度検出手段20で検出した回転角度に基づいて補正することができ、回転角度を高精度且つ短時間で測定することが可能となる。
(もっと読む)
形状計測方法
【課題】三次元計測器によって計測した点群データから計測対象物のmanifoldでかつ自己交差を含まない閉じた多面体データを生成する。
【解決手段】計測点群データに基づいて計測対象物の表面形状を表すサーフェイスを陰関数として作成する工程と、サーフェイスが存在する計測領域全体を三次元ドロネー図による分割処理により隙間なく、重複なく埋め尽くされた四面体の小領域(以下、セルという)に分割する工程と、セルの各頂点をサーフェイスの内側に存在する内点5と、外側に存在する外点6とに分類する工程と、境界セルを抽出する工程と、境界セルとサーフェイスとの交点7を計算する工程と、各境界セルが持つ交点7を繋ぎ合わせることにより三角形又は四角形の面を求める工程と、全ての面を結合する工程とを含むので、計測対象物のmanifoldでかつ自己交差を含まない閉じた多面体データを自動的に作成することができる。
(もっと読む)
測定装置、形状測定装置、形状測定方法、及び構造物の製造方法
【課題】凹部の内側の情報に関する測定精度を向上させる。
【解決手段】形状測定装置は、撮像素子5と、複数の光学素子を含み、撮像素子5と共役な共役面10を、複数の光学素子の配列方向に対して鋭角または鈍角の関係となるように形成する結像光学系6と、測定対象面に対して結像光学系6の少なくとも一部を移動可能な走査部と、走査部の位置情報及び撮像素子5の画像情報に基づいて、測定対象面の位置情報を取得する位置情報取得部と、を備える。
(もっと読む)
形状測定装置並びに深さ測定装置及び膜厚測定装置
【課題】試料表面の変位量が大きくても、フェーズラッピングの問題が生ずることなく、試料の微細な表面形状を高分解能で測定できる形状測定装置を実現する。
【解決手段】白色光源から出射した照明光は、入射光をシャーリングする第1の光路と入射光に対して可変光路長ないし可変位相量を導入してフリンジスキャンを行う第2の光路とを有する干渉光学系及び対物レンズを経て試料に入射する。試料上には、シャーリングされた参照ビームにより形成される第1の照明領域とフリンジスキャンされた測定ビームにより形成される第2の照明領域が形成される。第1及び第2の照明領域から出射した反射光は、対物レンズ及び干渉光学系を介して2次元撮像装置に入射し、2つの照明領域の画像が合成された干渉画像が形成される。フリンジスキャンにより、2つの画像を構成する反射光間に白色干渉が発生し、干渉信号を検出することで、試料の形状又は孔の深さが測定される。
(もっと読む)
部品高さ測定方法およびその装置
【課題】
周辺を壁で囲まれた凹型形状の被測定部品においても、内側形状を正確に計測することで、被測定部品の高さ及び体積を求めることができるようにする。
【解決手段】
載置面上に被測定部品を載置して被測定部品の高さ方向に移動可能なテーブルの載置面に垂直な方向から載置面上に載置された被測定部品に対物レンズを介して光パターンを投影し、テーブルを被測定部品の高さ方向に順次スッテプ移動させて各ステップ移動ごとに光パターンが投影された被測定部品を対物レンズを介して撮像して光パターンの画像を取得し、テーブルの各ステップ移動ごとに撮像して取得した光パターンの複数の画像を処理して被測定部品の各部の高さ情報を得て被測定部品の高さ画像または高さ情報を含む画像を生成して部品高さを測定するようにした。
(もっと読む)
3次元形状測定装置
【課題】3次元形状測定装置を提供すること。
【解決手段】3次元形状測定装置は、光を発生する光源ユニットおよび光源ユニットから発生された光を格子パターンを有する格子パターン光に変更する格子ユニットを含み、格子パターン光を所定方向から測定対象物に照射する照明部、および格子ユニットを格子パターンの延長方向および格子パターンの配置方向に対して所定の傾斜方向に移送させる格子移送ユニットを含む。よって、製造コストを低減して、3次元形状測定装置は容易に管理することができる。
(もっと読む)
露光装置及び露光方法、並びにデバイス製造方法
【課題】従来の干渉計に比べて高精度な移動体の位置情報の計測を可能にする。
【解決手段】露光装置は、基板を保持して、XY平面内で移動し、XY平面に交差する反射面134を有するステージWSTと、計測装置20Y’とを備えている。計測装置は、ステージWSTの上方に配置され反射面134を介して入射した光ビームを回折させて反射面134に戻す固定スケール135と、反射面134に戻された光ビームを検出する検出部(124A、124B、126、28)と、を有する。計測装置は、固定スケール135からの戻りビームを、再度反射面134を経由させることで得られる前記光ビームの複数の回折ビームの干渉光を前記検出部で検出することで、ステージWSTのY軸方向の位置を計測する。
(もっと読む)
形状測定装置
【課題】安価でかつ幅方向に高い分解能を有することができ、高精度に被測定物体の形状を測定可能にする。
【解決手段】被測定物体1の搬送方向に対し垂直な平面内であってその斜め上方または下方に配置されスリット状光を照射するスリット状光光源2a,2bと、被測定物体1を介しスリット状光光源2a,2bと反対側となる被測定物体1の斜め上方または下方であって、被測定物体1の表面1aまたは裏面1b上に照射されたスリット状光をその照射方向に対し所定の角度だけずれた方向から撮像する撮像部3a,3bと、撮像部3a,3bが撮像した被測定物体表面1aおよび裏面1bの撮像画像の座標を、撮像部3a,3bがスリット状光光源2a,2bからの照射線上で撮像したように変換する座標変換部4a,4bと、その座標変換された撮像画像の座標に基づいて、被測定物体1の断面厚み形状を演算する断面厚み形状演算部5とを有する。
(もっと読む)
三次元計測装置、三次元計測装置の制御方法、およびプログラム
【課題】パターンの1周期を撮像素子の少ない画素数でサンプリングした上で交点間隔の誤差を低減し、三次元計測の精度を向上する。
【解決手段】明部と暗部とが交互に配置された第1の明暗パターン光が投影された対象物を撮像して取得される第1の画像の階調値と、当該第1の明暗パターン光の位相をずらした第2の明暗パターン光が投影された当該対象物を撮像して取得される第2の画像の階調値とを用いて、当該第1の明暗パターン光と当該第2の明暗パターン光との複数の交点位置を検出する検出部と、検出部により検出された複数の交点位置に含まれる第1の交点位置と当該第1の交点位置と隣接する第2の交点位置とに基づいて、第3の位置を算出して、当該第3の位置の間隔に基づいて対象物の三次元位置を計測する計測部と、を備える。
(もっと読む)
光学測定装置、光学測定方法および同測定方法を用いた光学フィルムの製造方法
【課題】同じ測定箇所で位相差値と厚みデータとを測定することで、複屈折や厚み方向位相差値Rthをより精度よく得ることができる光学測定装置を提供する。
【解決手段】光学測定装置Mは、光学フィルムSに光L1を入射する投光器30と、投光器30から光学フィルムSに入射された入射光L1を受光する受光器34と、受光器34によって受光された透過光L1から光学フィルムSの面内位相差値R0を算出する位相差R0算出部11と、位相差R0算出部11で面内位相差値R0を算出するのに用いた入射光L1と同じ入射光L1を用いて光学フィルムSの厚みデータdを算出する厚み算出部12とを備えている。受光器34は、2つのファイバ部8a,8bに分岐される光ファイバ8を含んでおり、一方のファイバ部8aが位相差R0算出部11に接続され、他方のファイバ部8bが厚み算出部12に接続されている。
(もっと読む)
カメラシステムおよび画像生成方法
【課題】被検物が撮像画像上を移動した場合でも、良好な検波処理画像を得ることができるカメラシステムを提供する。
【解決手段】パルス光を被検物に照射する投光手段30と、前記パルス光が照射される領域を含む領域を繰り返し撮像する撮像手段20と、前記撮像手段で撮像された画像の画像信号を記憶する記憶手段40と、前記記憶手段に記憶された画像信号に対して、同期検波処理を行なって、前記投光手段から照射される前記パルス光の点灯消灯のタイミングに同期した検波処理画像を生成する同期検波処理手段と、前記被検物の移動速度を算出する移動速度算出手段と、前記移動速度算出手段により算出された前記被検物の移動速度に基づいて、前記被検物が撮像画像上を移動することにより前記検波処理画像内に発生するノイズ成分を低減するための補正を行なう補正手段と、を備える。
(もっと読む)
形状計測装置、形状計測装置の制御方法、およびプログラム
【課題】物体の反射特性によらずに高精度に形状計測ができ、また計測精度の調整が可能な光学的走査による高速な形状計測装置を提供する。
【解決手段】形状計測装置100は、スリット光1により物体を走査する光学走査手段10と、物体からの、スリット光1の反射光による計測画像を取得する撮像手段20と、取得した計測画像を基に、物体の反射位置を算出する反射位置検出手段30と、を備え、反射位置検出手段30は、取得した計測画像を構成する複数の画素に分布する計測輝度パターンから、物体の反射位置候補座標を算出し、計測輝度パターンと、反射位置候補座標を含む比較座標範囲内において所定の分解能の間隔で用意された複数の参照輝度パターンとを比較して、計測輝度パターンとそれぞれの参照輝度パターンとのパターン類似度を算出し、パターン類似度が最も大きな参照輝度パターンが特定する座標情報から、物体の反射位置座標を求める。
(もっと読む)
3D表面形状をキャプチャーするための方法およびシステム
【課題】変形表面のキャプチャーを高解像度で得る。
【解決手段】シーンの3D画像データをキャプチャーするシステムにおいて、各々が互いに異なる波長の光を照射し、キャプチャーすべきシーンを照明するよう構成された三つの光源と、前記シーンから反射された前記光源からの光を受光するよう構成され、各光源から受光された光を分離し、前記三つの光源ごとにキャプチャーされた前記画像に関するデータを出力する第一ビデオカメラと、前記シーンの第一デプスマップをキャプチャーするよう構成されたデプスセンサと、前記第一ビデオカメラからデータを受信し、該データを処理して前記三つの光源ごとにキャプチャーされた前記画像から得られた法線領域に関するデータを取得する解析ユニットにおいて、前記法線領域に関する前記データを前記第一デプスマップのデータに合成して、前記シーンの3D画像データをキャプチャーする前記解析ユニットとを備える。
(もっと読む)
形状測定装置
【課題】帯状体の顕在化形状を、幅方向の分解能を高めて検出可能な形状測定装置を提供する。
【解決手段】被測定物体1の搬送方向に平行な直線と垂直の平面内に配置され、平面内の被測定物体1表面の幅方向へスリット状の光を照射するスリット光光源2と、平面と垂直な平面でかつ被測定物体1の表面に垂直な平面を介してスリット光光源2と反対側に配置され、被測定物体1上のスリット状の光を撮像する撮像装置3とを備えた。また、被測定物体1の幅方向に沿い被測定物体1に外力を印加する外力印加装置14を設け、潜在形状演算器40を備えた。
(もっと読む)
形状計測装置
【課題】太陽電池ウェハの表面及び裏面の形状のみならず、太陽電池ウェハの厚みを高速に算出する。
【解決手段】光源121,131は太陽電池ウェハの表面及び裏面に光切断線CLを照射する。カメラ122,132は太陽電池ウェハが所定距離搬送される都度、測定試料500の表面及び裏面の光切断線画像を連続撮像する。計測データ算出部123,133は角光切断線画像から光切断線CLが現れている重心座標を表面計測データ及び裏面計測データとして算出する。高さデータ算出部143は、表面計測データ及び裏面計測データから太陽電池ウェハの表面及び裏面の高さデータを算出する。厚みデータ算出部146は、太陽電池ウェハの表面及び裏面の高さデータから太陽電池ウェハの厚みデータを求める。
(もっと読む)
移動環境認識装置及び方法
【課題】高速、且つ高精度に測定対象の形状認識情報を得ることができる移動環境認識装置を提供する。
【解決手段】測定対象7に対して円錐走査を行う円錐走査手段1を備えている。円錐走査手段は、移動環境検出器3と、この移動環境検出器で計測した情報を加工する外界認識装置9を備えている。この外界認識装置は、円錐走査手段の測定データに基づいて前記測定対象の傾斜角、傾斜方向及び測定対象中心までの距離を算出する移動環境検出手段と、この移動環境検出手段が算出した前記測定対象の算出データに基づき、各測定対象の面形状を判断する面形状判断手段と、この面形状判断手段が水平面と判断した所定の測定対象の形状を認識する形状認識手段とを備えている。
(もっと読む)
情報取得装置、投射装置および物体検出装置
【課題】検出対象物が近距離にある場合においても、大きな目標物の距離情報を取得できる情報取得装置、投射装置および物体検出装置を提供する。
【解決手段】投射光学系11は、レーザ光源111と、コリメータレンズ112と、レーザ光を分離させるハーフミラー113と、分離されたレーザ光をドットパターン光Dp1に変換して目標領域に投射するDOE114と、分離されたレーザ光をドットパターン光Dp2に変換して目標領域に投射するDOE115と、を備える。複数のDOE114、115を用いることにより、広い角度範囲で、目標領域にドットパターンを照射できる。これにより、情報取得装置は、検出対象物が近距離にあるような場合においても、検出対象物の距離情報を適正に取得することができる。
(もっと読む)
計測装置
【課題】被計測面の高さの計測において、計測精度の高精度化と計測範囲の広範囲化との両立に有利な技術を提供する。
【解決手段】参照光と計測光との干渉光強度を検出する複数の領域が2次元状に配列された検出部と、光源からの光を第1と第2の光に分離する第1の光学系と、第1の光が平行光で入射され2次元状の光路長差を有する複数の参照光束を生成する生成部と、生成部で生成された参照光の複数の参照光束のそれぞれが対応する複数の領域に入射するように、検出部に入射させる第2の光学系と、第2の光を被計測面の計測点に集光する第3の光学系と、計測点で反射された第2の光が複数の領域のそれぞれに入射するように、検出部に入射させる第4の光学系と、複数の領域のそれぞれに入射する複数の参照光束が有する光路長と複数の領域との対応関係に基づいて、複数の領域で検出される干渉光の強度から計測点における被計測面の高さを算出する処理部を有する。
(もっと読む)
形状認識方法、形状認識装置及び実装基板生産装置
【課題】物体が高速で移動し、物体の大きさによって必要とされる分解能が異なる場合でも、当該物体の形状認識を精度良く行うことができる形状認識方法を提供する。
【解決手段】物体の形状認識方法であって、基準光を物体上の投影領域に投影する基準光投影ステップ(S102)と、基準光が投影された投影領域のうちライン状の領域を撮像する基準光撮像ステップ(S104)と、輝度の傾斜方向に輝度が異なる輝度傾斜量を有する光である輝度傾斜光を投影領域に投影する傾斜光投影ステップ(S106)と、輝度傾斜光の投影方向と異なる撮像方向で、輝度傾斜光が投影された投影領域のうち、輝度傾斜光の輝度の傾斜方向と異なる方向に延びて配置されるライン状の領域を撮像する傾斜光撮像ステップ(S108)と、基準光撮像ステップ(S104)と傾斜光撮像ステップ(S108)での撮像結果を用いて物体の形状を認識する形状認識ステップ(S110)とを含む。
(もっと読む)
81 - 100 / 726
[ Back to top ]