
Fターム[2F065DD06]の内容
光学的手段による測長装置 (194,290) | 目的 (6,263) | 処理高速化 (1,900)
Fターム[2F065DD06]に分類される特許
1,881 - 1,900 / 1,900
オブジェクト検出方法、オブジェクト検出装置、およびオブジェクト検出プログラム
本発明の利点は、オブジェクトを適切に検出することである。本発明におけるオブジェクト検出装置は、オブジェクトまでの距離を決定する複数のカメラと、距離を決定する距離決定部と、ピクセルの距離に対するピクセル度数を特定するヒストグラム生成部と、最もありそうな距離を決定するオブジェクト距離決定部と、距離の差に基づくピクセルの確率を提供する確率マッピング部と、ピクセルのグループとしてカーネル領域を決定するカーネル検出部と、カーネル領域の近傍にあるピクセルから選択したピクセルのグループとして縁領域を決定する縁検出部と、オブジェクトが所定の確率で現れるオブジェクト領域を特定するオブジェクト特定部と、を有する。  (もっと読む)
(もっと読む)
差動限界寸法およびオーバーレイ測定装置および測定方法
【課題】 イン・ラインの測定および制御ツール、テスト・パターンおよび評価方法を含む統合された測定システムを提供する。
【解決手段】 基板上で寸法を測定するための方法を記載する。ターゲット・パターンは、主周期ピッチPで反復する公称特徴寸法を備え、主方向に直交する所定の変動を有する。基板上に形成されたターゲット・パターンは、少なくとも1つの非ゼロ次回折が検出されるように照射する。公称寸法に対する転写された特徴寸法の変動に対する非ゼロ次回折の応答を用いて、基板上で限界寸法またはオーバーレイ等の対象の寸法を求める。本発明の方法を実行するための装置は、照射源と、非ゼロ次回折を検出するための検出器と、ターゲットからの1つ以上の非ゼロ次回折を検出器において検出するようにターゲットに対して照射源を位置付けるための手段と、を含む。
(もっと読む)
巻締機械の金型位置を測定するための光学機器
本発明は金型、特に捲締機のチャックとロールの特性を測定する光学装置を提供する。前記光学装置は、放射を生成するように適用された放射ソース、放射が金型のプロファイルを通過するようにそらすための、そらす手段、プロファイルを通り抜けてきた放射を受信する検出手段から構成される。前記チャックと前記ロール間のギャップのプロファイルのような金型の特性は、プロファイルを通過し検出された放射から処理されて求められる。  (もっと読む)
(もっと読む)
遮蔽された部分の表面を対称性の算出により見込み復元するための技術

【解決手段】所与の物体の遮蔽面の見込み3Dマップを計算するシステムに関する。このシステムは、物体の視認可能面の初期3Dマップを取得し、初期3Dマップから1以上の対称性を特定する。システムは、初期3Dマップの点を特定された対称性にしたがって遮蔽空間に投影することにより、遮蔽面の見込み3Dマップを計算する。このシステムは初期3Dマップを取得するための画像装置を含む。現実の遮蔽面は隠されているが故に完全にはわからない。しかし、計算された3Dマップは実際の遮蔽空間に多くの点で近似する。なぜなら、ほとんどの物体は1以上の対称性をもっており、計算された3Dマップは物体の初期3Dマップにおいて特定されたそのような対称性に基づくからである。 (もっと読む)
自動車のフード状部とその他の自動車ボディとの間の隙間寸法およびオフセットの少なくとも一方を調整するための方法および装置
本発明は、自動車の可動のフード状部(2)と該自動車の残りのボディ(3)との間の隙間寸法およびオフセットの少なくとも一方を調整するための方法および装置(1)に関する。フード状部(2)はまず粗調整された組付け位置で前記ボディ(3)に対してできるだけ同一平面となるようはめ込まれかつ保持される。さらに前記フード状部は、隙間寸法および/またはオフセットについてのあらかじめ定義された値ができるだけ正確に守られるように微調整される。隙間寸法および/またはオフセットをできるだけ非接触で、できるだけ簡単かつ迅速に、かつ柔軟に調整することができるようするために、微調整のために、フード状部(2)と残りのボディ(3)との間の隙間寸法および/またはオフセットについての実測値(21_ist)が光学的に検知される。隙間寸法および/またはオフセットについての検知された実測値(21_ist)とあらかじめ設定された目標値(21_soll)に従って、少なくとも1つのアクチュエータ(12)のための制御信号(24)が求められる。  (もっと読む)
(もっと読む)
マイクロエレクトロニクスにおける寸法検査のための光学フーリエ変換の使用
本発明は、
-像焦点面における物体の基本的な表面の光学フーリエ変換像を形成する手段と、
-検出手段によって提供された情報から少なくとも1つの物体の寸法的および/または構造的な特徴に関連するデータを生成する処理手段と、
を含むことを特徴とする、物体の寸法的または構造的な特徴を測定するための装置に関する。 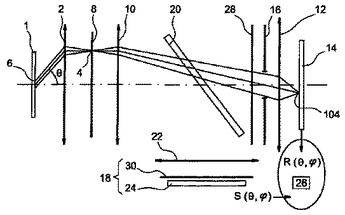 (もっと読む)
(もっと読む)
導電性ローラの表面判別方法

【目的】 光の漏れ具合をデジタル画像処理することにより導電性ローラDRの表面状態を定量的に把握し、良否判定アルゴリズムを用いることにより導電性ローラDRの良否判定を正確に行うことを可能とし、さらに検査員の画像注視により制限があった検査数量を増加させることが可能な表面判別方法を提供する。
【構成】 検査ローラ18及び導電性ローラDRの転接部に光りを照射し、転接部における光り漏れ具合をCCDカメラ28により撮影する。CCDカメラ28により撮影された光り漏れ部の画像データを信号処理装置30へ送出する。信号処理部30では、画像変換部31で光り漏れ部の画像をデジタル画像情報に変換し、画像処理部32で光り漏れ部の幅および高さを画素数表現で計測し、良否判定処理部33で幅及び高さの画素数データと良否判定アルゴリズムにより、導電性ローラDRの表面状態の判別を行う。これにより、検査員が画像表示装置を注視することなく、導電性ローラDRの表面状態の良否を判定することが可能となる。
(もっと読む)
透過型の空間ヘテロダイン干渉法(SHIFT)測定
透過型の空間ヘテロダイン干渉法(SHIFT)測定のシステムおよび方法が記載される。方法は、少なくとも一部は半透明である対象物(630,730)を透過した基準ビームおよび対象ビームを用いてフーリエ解析のために、空間ヘテロダイン干渉縞を含む空間ヘテロダイン化されたホログラムをデジタル記録すること;解析されるイメージを規定するために、基準ビームと対象ビームとの間の角度によって規定される空間テロダインキャリア周波数の上にデジタル記録された空間的にヘテロダイン化されたホログラムの元の原点を重ねるためにホログラムの元の原点を移動することによって、デジタル記録された空間的にヘテロダイン化されたホログラムをフーリエ解析すること;元の原点周辺の信号を切り離し、結果を規定するために、解析されたイメージをデジタルフィルタリングすること;および、その結果に逆フーリエ変換を施すことを含む。 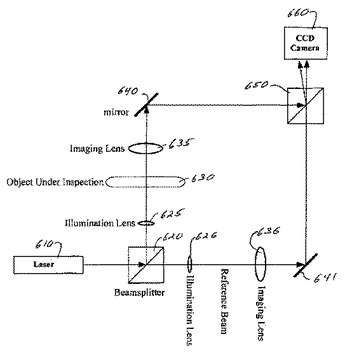 (もっと読む)
(もっと読む)
機械学習システムを用いた半導体ウェハ上に形成された構造の光学測定
半導体ウェハ上に形成された構造を、測定装置を用いて測定された第1の回折信号を取得することにより検査する。第2の回折信号は、機械学習システムを用いて生成される。機械学習システムは、第2の回折信号を生成するために、構造のプロファイルを特徴付ける1以上のパラメータを入力として受け取る。第1の回折信号と第2の回折信号は比較される。第1の回折信号と第2の回折信号が一致基準の範囲内で一致する場合、構造の形状は、第2の回折信号を生成するために機械学習システムで使用されたプロファイル又は1以上のパラメータに基づいて求められる。  (もっと読む)
(もっと読む)
キャリブレーションチャート画像表示装置、キャリブレーション装置、キャリブレーション方法
【課題】カメラによるキャリブレーションシートの撮影が容易に行えるキャリブレーションチャート表示装置を提供すること。
【解決手段】所定のキャリブレーション撮影方向から撮影されたキャリブレーションチャート1の画像を記憶する校正画像記憶部59と、校正画像記憶部59に記憶されたキャリブレーションチャート画像を、前記キャリブレーション撮影方向と所定の画像回転角度に応じて表示するキャリブレーションチャート画像表示部61とを備えている。
(もっと読む)
装置とユーザとの間のコミュニケーションのための電気装置及び方法
装置とユーザとの間のコミュニケーションのための電気装置及び方法が説明される。
装置は、該装置の近傍の物体(34、36)を検出するためのセンサ手段(例えばカメラ(18))を有する。物体(34、36)の位置は、メモリ(M)に記憶される。例えば機械的ポインティング素子の形式の、又は、集中化された光ビームを発生させるための光源を備えた、方向ポインティングユニット(20)は、該装置の近傍にある物体の方向に向けられることができる。このようにして、対話において、対応する物体が、人間ユーザに指し示されることができる。 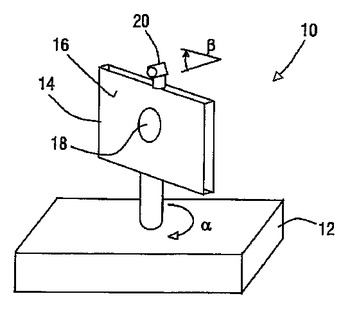 (もっと読む)
(もっと読む)
車外監視装置
【課題】レーザレーダによる測距値と画像による測距値との最適な統合を複雑な演算等することなく素早く行い前方の立体物データとして素早く出力する。
【解決手段】距離データ統合部5cはレーザ距離データと画像距離データの統合を次のように行う。レーザ距離データが有効な場合、レーザ距離データが遠方の場合は最終的な距離データはレーザ距離データとし、レーザ距離データが中間距離の場合、画像距離データが有効で且つ画像距離データとレーザ距離データとの差が所定値以内の場合は最終的な距離データはレーザ距離データと画像距離データとの平均値とし、上述以外の場合はレーザ距離データとする。レーザ距離データが近距離の場合は最終的な距離データは画像距離データとし、レーザ距離データが極近距離の場合は最終的な距離データはレーザ距離データとする。またレーザ距離データが無効な場合は最終的な距離データは画像距離データとする。
(もっと読む)
領域特定方法、収差計測方法及び収差計測装置
【課題】 シェアリング干渉計測において処理領域を高速に設定する方法を提供する。
【解決手段】 レンズから出射された光を回折し干渉させてシェアリング干渉像を得る。次に、回折光の位相を変化させ、位相変化により時間的に強度変化する複数の画像データ(座標、強度)を記憶装置に取り込む。また、複数の画像データにおいて、各画素における強度データの変化の大きさ(強度変化量)を算出する。そして、画像データ領域の略中央を通ってシェアリング軸と平行な線分と、シェアリング軸と直交する線分とによって、画像データの領域を4つの小領域に分割する。最後に、各小領域において、シェアリング軸に平行な複数ラインを設け、強度変化量があるしきい値を越える画素がただ一つであるラインエッジ点を決定する。
(もっと読む)
実立体モデル作成装置、立体データ作成装置、疑似立体データ作成装置並びにその方法
【課題】 レーザ光を対象物上にスキャンして三次元形状データを得るには、そのスキャンにかなりの時間がかかりその間対象物が静止している必要があり、人物などの三次元形状データを得るのは、難しいという問題があった。
【解決手段】 データ入力部10において、カメラを用い対象物の複数の画像を得る。この画像に基づいて、モデリング部12において、色彩データを含む三次元形状データを得る。この三次元形状データに基づいて成形部14において実立体モデルを成形する。これは切削や成形型による成形によって行われる。そして、色づけ部16により、色彩データに基づいて、実立体モデルに対し色づけが行われる。
(もっと読む)
液晶表示装置、そのセル厚測定装置及び測定法並びに位相差板
【課題】 液晶分子が存在する液晶層のみのリタデーション(dLC・△n)を求めることができ、セル厚を求めることができる液晶表示装置、そのセル厚測定装置及び測定法並びに位相差板を提供する。
【解決手段】 液晶領域中の液晶分子が電圧無印加時に略垂直に配向する液晶層と、液晶層を挾持する1対の基板と、を備える液晶表示装置の液晶セル5の厚さを測定するセル厚測定装置において、面内にリタデーションを有する1対の1軸性位相差板をその遅相軸方向をそろえて両外側表面に取付けた液晶セルを搭載するステージ1と、偏光子23を有し、かつ、位相差板の遅相軸方向に対して方位角方向44°〜46°の偏光光を出射する光源2と、偏光光に対して偏光子とクロスニコルに配設された検光子31を有し、かつ、偏光光の透過光量を検出する光検出器3と、位相差板に垂直な方向から偏光光の極角方向入射角を変化させる回転装置4と、を備える。
(もっと読む)
白ねぎのぼけ部検出方法およびその装置
【課題】 本発明は、白ねぎのぼけ部の端部の検出を定量的に行うことができる白ねぎのぼけ部検出装置を提供することを目的とする。
【解決手段】 白ねぎ3を拡散照明する蛍光管7および拡散板8と、赤外線を吸収し青色の光のみ透過する光学フィルタ4と、拡散照明された白ねぎ3の反射光を光学フィルタ4を介して入力し、白ねぎのぼけ部3Bおよびその近傍を撮影するCCDカメラ5と、CCDカメラ5の画像信号により、白ねぎの軟白部3Aよりぼけ部3Bに移るぼけ部端部を検出する検出装置11を備える。この構成によれば、ぼけ部3Bの輝度データから、常に同一のしきい値によりぼけ部3Bの端部が検出されることにより、選別過程で等級選別に大きく係る軟白部3Aの長さLが自動で定量的に検出され、人間の主観に依存することなく、均一な白ねぎ3の等級の判定が可能となり、白ねぎ3の品質を安定して均一に維持できる。
(もっと読む)
透明膜の段差の測定方法及び位相シフトマスクの作成方法
【課題】透明膜の段差の測定方法に関し、非接触、非破壊で且つ簡単な操作で高速、高精度に位相シフターの段差を測定すること。
【解決手段】第1の透明膜1の一部に形成された複数の第1の溝Sa1 ,…,San の段差量t1 ,….tn と該第1の溝Sa1 ,…,San からの反射光の偏光状態を示すパラメータの値との相関関係f1 を求めてデータベース化した後に、第2の透明膜42の一部に形成された第2の溝45の反射光の偏光状態を示すパラメータの第1の値を計測して、該第1の値と前記データベースの前記相関関係に基づいて該第2の溝45の第1の段差量を求める工程を含む。
(もっと読む)
カラーフィルターの画素幅測定方法
【課題】 インラインでカラーフィルターの画素幅を測定することができる、カラーフィルターの画素幅測定方法を提供すること。
【解決手段】 カラーフィルターの基板上に赤色、緑色、青色の各色の着色画素を順次形成する際に、画素領域の外側に、画素幅測定用のダミー画素のパターンを、各ダミー画素が重ならないように間隔をあけて形成し、各ダミー画素の幅を測定することにより、前記各色の着色画素の幅を測定する。
(もっと読む)
外観検査装置
【課題】 短時間で確実に、そして比較的容易に目視検査を行うことができる外観検査装置を得ること。
【解決手段】 本発明の実施形態の外観検査装置1は、基準基板Psと被検査基板Piとを隣接してXYテーブル2上に載置し、そのXYテーブル2の送りを検査場所の順に制御装置3内のコンピュータにプログラムし、そのプログラムに従って前記XYテーブルを送り、基準用ビデオカメラ410で基準基板Psの所定部分を撮影し、検査用ビデオカメラ420で被検査基板Piの前記基準基板Psと同一の部分を撮影し、両映像を画面分割装置310を介してテレビモニタ5の画面上に隣接して映出し、両映像を比較して被検査基板Piの良否を目視検査できるように構成されている。
(もっと読む)
3次元形状データの統合処理方法および3次元形状データの表現方法
【課題】 統合すべき部分形状のポテンシャル方向が大きく異なる場合でも、正確な統合が可能な統合処理方法を提供する。
【解決手段】 部分形状データ10および20は位置合わせを行った段階では異なる曲面を構成しているので、それぞれの形状ベクトルV1およびV2は独立しているが、部分形状データ10および20を形状ベクトルを用いて表現し、形状ベクトルの演算により部分形状データ10および20を統合することで統合後の形状ベクトルV3を得る。
(もっと読む)
1,881 - 1,900 / 1,900
[ Back to top ]