
Fターム[2F065DD12]の内容
光学的手段による測長装置 (194,290) | 目的 (6,263) | 外乱成分対策 (899) | 迷光 (195)
Fターム[2F065DD12]に分類される特許
101 - 120 / 195
ウェハスクライブのためのオートフォーカス方法及び装置
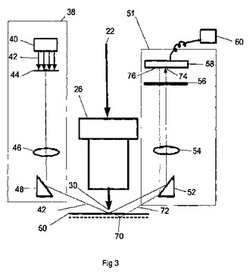
方法及び装置は、ウェハスクライブシステムのためのリアルタイムのオートフォーカスを実行する。方法及び装置は、スクライブレーザビームのための対物レンズ(26)の真下のウェハ(10)の表面(50)に、グレージング角で方向付けられた偏光光(42)を用いる。ウェハから反射した光は、フィルタリング(56)され、スクライブレーザビームからの光が除外され、位置敏感型検出器(58)に集光され、対物レンズからウェハ表面までの距離が測定される。 (もっと読む)
露光装置及びデバイス製造方法

【課題】ショット領域と計測点との位置関係が複数のショット領域間で異なることによる不利益、例えば局所デフォーカスを低減する。
【解決手段】露光装置は、感光剤が塗布された基板の複数のショット領域を投影光学系を介して順に露光する。露光装置は、基板が走査駆動された状態で、連続する複数のショット領域内に定義された計測点の面位置を計測する計測器と、計測器による計測結果に基づいて、基板の被露光領域が投影光学系の像面に一致するように基板の面位置を制御する制御部とを備える。複数のショット領域401、402において、計測点を共通の配置とする。
(もっと読む)
光学系、パターン検査装置、パターンの検査方法、パターンを有する物品の製造方法
【課題】干渉縞の発生を大幅に抑制することができる光学系、パターン検査装置、パターンの検査方法、パターンを有する物品の製造方法を提供する。
【解決手段】入射する光を複数のビームに分割するインテグレータユニットと、前記インテグレータユニットを光軸の回りに回動させる第1の駆動手段と、前記インテグレータユニットの出射側に設けられ、互いに光路長が異なる複数の凹部を有する回転位相板と、前記回転位相板を回転させる第2の駆動手段と、を備えたことを特徴とする光学系が提供される。
(もっと読む)
位置情報取得装置、位置推定装置、及び移動体
【課題】移動体(例えば、ロボット)の存在位置を推定する際に用いられる位置情報を従来よりも無駄なく取得すること。
【解決手段】外部から到来する光信号の検出に基づいて位置情報を取得する位置情報取得装置60であって、光信号を第1及び第2方向へ分岐させるビームスプリッタ2と、ビームスプリッタ2を介して第1方向に導かれる光信号を受光する位置検出センサ3と、複数の画素が配置された撮像面を有すると共に、ビームスプリッタ2を介して第2方向に導かれる光信号を1つ以上の画素で受光するCMOSイメージャ6と、位置検出センサ3の出力に基づいてCMOSイメージャ6に複数の画素の一部から信号を読み出させる、又は位置検出センサ3の出力に基づいてCMOSイメージャ6が撮像するタイミングを制御する制御部と、を備える。
(もっと読む)
検査装置
【課題】ワークを保持部などの保持機構で保持した状態であっても、誤認識なくワークの良否判定を行う。
【解決手段】検査装置1では、ワーク2を照明する円環状の光源部33を有する照明部3と、ワーク2を撮影する撮影部4とが設けられ、ワーク2を保持する保持部5が、照明部3と撮影部4との間に固定もしくは移動可能に配され、照明部3の光源部33からワーク2に照射した光の照射方向上から外れた位置に、撮影部4が配されている。そして、ワーク2に異物を含む不確定な物がある場合、光源部33からワーク2に照明した光は、異物を含む不確定な物によりその光路が変更されて撮影部4にて撮影される。
(もっと読む)
回転角度検出装置及びロボットのアーム回動機構及びロボット
【課題】ロボットに備えられたアームの絶対角度をより容易かつ高精度に検出することの
できる回転角度検出装置、及び該回転角度検出装置を備えるロボットのアーム回動機構、
及び該アーム回動機構を採用したロボットを提供する。
【解決手段】基台11の上面11Aには基台11内のモータにより回動される回転軸AX
1に固定される回転体としての連結軸12が設けられている。基台11の上面11Aには
反射型光センサ21を配設し、連結軸12の下面12Aには中心が軸心C1に一致する有
底円筒形状の反射体20を固定する。反射体20の円筒側壁20Bの下面には、その底部
20Aに対して傾斜を有する反射面20sが形成されている。反射型光センサ21から発
せられる光L1の反射面20sによる反射光L2の光量が、反射面20sと反射型光セン
サ21との対向距離Dにより変化することを利用して、基台11に対する連結軸12の回
転角度を絶対角度として得る。
(もっと読む)
形状測定装置及び形状測定方法
【課題】測定光以外の光による影響を可及的に少なくして測定精度を向上させることができる形状測定装置及び形状測定方法を提供すること。
【解決手段】被検物Aに測定光(スリット光源51からのスリット光)を照射して該被検物の3次元形状を測定する形状測定装置である。前記測定光以外の光の変化を検出する検出部(光センサ20)と、前記検出部が検出した情報に基づいて前記被検物の形状測定に適したタイミングを決定するタイミング生成部(シャッター・タイミング回路40)と、前記タイミング生成部によって生成した前記タイミングで前記被検物の形状測定を行う測定部(スリット光源51、カメラ52)と、を備える。
(もっと読む)
面位置検出装置、面位置検出方法、露光装置、及びデバイス製造方法
【課題】被検面の近傍に被検面以外の面が存在しても被検面の面位置情報を高精度に検出できること。
【解決手段】本発明にかかる面位置検出装置は、物体の所定の面(14a)の位置情報を検出する面位置検出装置であって、所定の面に対して傾斜した方向から光を投射する第1の光学系(51E)と、物体からの光を受光する第2の光学系(52E)と、第2の光学系(52E)からの光を受け取り、該光に基づいて、所定の面の当該所定の面に交差する方向における位置情報を検出する検出系(13)と、第1及び第2の光学系(51E, 52E)の少なくとも一方の光路中に設けられ、第2の光学系(52E)からの光のうち物体の所定の面以外の面を介した光中の異なる部分の間に位相差を付与する位相差付与系と、を備える。
(もっと読む)
3次元形状測定器
【課題】強い外乱光が存在する環境下においても使用することができる3次元形状測定器を提供すること。
【解決手段】3次元形状測定器の形状測定装置の光学系1は、レーザ光を出射するレーザダイオード2と、出射されたレーザ光を測定対象物へ照射するための第1光学系と、測定対象物からの反射光であるレーザ光を結像されるための第2光学系と、第2光学系からのレーザ光の結像位置を検出するためのCCDラインセンサ部13と、第2光学系からのレーザ光の強度を測定するためのフォトセンサ12とを有し、第2光学系のハーフミラー11により分岐されたレーザ光はCCDラインセンサ部13とフォトセンサ12へ分配され、フォトセンサ12の表面にはスリット部材12aが設けられている。
(もっと読む)
計数装置、距離計、計数方法および距離計測方法
【課題】距離の測定精度を向上させる。
【解決手段】距離計は、半導体レーザ1に発振波長が増加する第1の発振期間と発振波長が減少する第2の発振期間とを交互に繰り返させるレーザドライバ4と、半導体レーザ1の出力を電気信号に変換するフォトダイオード2の出力に含まれる干渉波形を数える計数装置7とを有する。計数装置7は、計数期間中の干渉波形の周期を測定し、測定結果から計数期間中の干渉波形の周期の度数分布を作成し、度数分布の周波数成分を解析し、周波数解析結果から干渉波形の周期の分布の代表値を求め、度数分布から、代表値の0.5倍以下である階級の度数の総和Nsと、代表値の1.5倍以上である階級の度数の総和Nwとを求め、これらの度数NsとNwに基づいて計数結果を補正する。
(もっと読む)
透明基板の検査方法
【課題】製造した透明基板の板厚のむらを容易に確認できるようにする透明基板の検査方法を提供する。
【解決手段】板厚分布の状況が既知である第一の透明基板と、検査対象となる第二の透明基板とを準備し、第一の透明基板と第二の透明基板の平均板厚の差を50μm以内とする。第一の基板と第二の基板の基板間隙を0.1mm以上とする。ピーク輝度に対する半値幅が5nm以上である光を照射する。第一の透明基板および第二の透明基板を通過する光の干渉強度分布によって、第二の透明基板の板厚分布の程度を判断する。
(もっと読む)
チャックテーブルに保持された被加工物の高さ位置検出装置
【課題】透明の被加工物であってもチャックテーブルに保持された被加工物の上面高さ位置を確実に検出するための高さ位置検出装置を提供する。
【解決手段】レーザー光線発振手段6からのレーザー光線のスポット形状を環状に形成する環状スポット形成手段82と、該スポット形状が環状に形成されたレーザー光線を第1の経路に導くビームスプリッター83と、第1の経路に導かれたレーザー光線を集光して被加工物Wに照射する集光器7と、被加工物で反射したレーザー光線が前記ビームスプリッターによって分光される第2の経路に配設されたピンホールマスク84と、ピンホールマスクを通過したスポット形状が環状の反射光をライン状のスポット形状に変換する円錐ミラー85と、ライン状のスポット形状に変換された反射光の位置を検出する位置検出器86と、検出された反射光の位置に基いて被加工物の上面高さ位置を求める制御手段とを具備する。
(もっと読む)
刻印検査装置
【課題】測定時間を短縮することができ、V字溝やU字溝状で形成された刻印文字の深さ計測を可能とするとともに、鏡面反射する刻印面であっても測定精度への影響が少ない刻印検査装置を提供する。
【解決手段】レーザスリット光源41〜45を走査ユニット71の移動ステージ72に支持し、Y方向73へ移動可能とする。各レーザスリット光源41〜45からのスリット光31の照射位置を、対応したCCDカメラ81〜85で斜め上方から撮像する。刻印面2で正反射するスリット光31の正反射光91が対応するCCDカメラ81〜85に直接入力されないようにレーザスリット光源41〜45とCCDカメラ81〜85との関係を設定する。各CCDカメラ81〜85で取得した画像を制御装置101で解析する。
(もっと読む)
形状測定装置及び方法
【課題】撮影と略同時に外乱光を測定することにより、外乱光の影響を可及的に排除して被検物の3次元形状を精度良く測定することができる形状測定装置を提供すること。
【解決手段】被検物4に測定光(パターン光)を照射し、該被検物で反射した光を受光して該被検物の形状を測定する形状測定装置である。前記照射時に前記反射した光を含む前記被検物からの光を検出し、前記照射をしない非照射時に前記反射した光を含まない前記被検物からの光を検出する光検出部(第1光検出部6、第2光検出部10)と、前記光検出部が前記照射時に検出した前記反射した光を含む前記被検物からの光検出成分から前記非照射時に検出した前記反射した光を含まない前記被検物からの光検出成分を除去する演算処理部7と、を備える。
(もっと読む)
ヘッドモーショントラッカ装置
【課題】 光学検出手段に対して外乱光の位置が変動するときにも、光学マーカーの位置を精度よく測定することにより、移動体に対する搭乗者の頭部の位置及び角度を精度よく算出することができるヘッドモーショントラッカ装置の提供。
【解決手段】 光学マーカー7に点灯と消灯とを繰り返させる光学マーカー駆動部28と、移動体センサ4から検出された角速度及び/又は加速度に基づいて、外乱光に対する移動体30の移動角度量を含む絶対移動体情報を算出する絶対移動体情報算出部24と、光学検出手段2に対する外乱光の移動位置量を算出することにより、光線の点灯データから外乱光の位置を補正した光線の補正点灯データを作成するとともに、光線の消灯データから外乱光の位置を補正した光線の補正消灯データを作成して差分することで、光学マーカー7のみからの光線の差分データを生成する差分生成部23とを備えることを特徴とする。
(もっと読む)
斜めのビュー角度をもつ検査システム
【課題】表面を斜めの検査角度において高い解像度で検査できるようにする方法及び装置を提供する。
【解決手段】表面に対して斜めのビュー角度に沿って表面のエリアを像形成するための装置は、ビュー角度に向けられた光学軸に沿ってエリアから光学放射を収集することによりエリアの初期傾斜像を形成するように適応された無限焦点光学リレー(192)を備えている。傾斜補正ユニット(194)が、初期像の傾斜を補正するように結合されて、実質的に無歪の中間像を形成する。中間像を像検出器に収束するために拡大モジュール(198)が結合される。
(もっと読む)
形状測定方法、プログラム、および形状測定装置
【課題】ゴースト像の影響を低減して測定精度を向上させた形状測定方法を提供する。
【解決手段】本発明に係る形状測定方法は、光切断法による被検物の形状測定方法であって、光切断を行うためのシート光を被検物に投影する第1のステップ(S101)と、第1のステップでシート光が投影された被検物の表面を撮像する第2のステップ(S102)と、第2のステップで撮像した画像に対しシート光の延在方向と交差する方向に走査して、輝度のピーク位置を検出する第3のステップ(S103)と、ピーク位置が複数検出されたとき、複数のピーク位置から画像におけるシート光の多重反射による像を特定する第4のステップ(S104)とを有している。
(もっと読む)
印刷装置の製造方法及び光軸調整方法
【課題】センサの周囲の物体からの反射光の影響を抑える。
【解決手段】投光部102及び受光部104を有するセンサ12と、光沢物体14とを備える印刷装置の製造方法であって、光軸調整工程を備え、光軸調整工程は、光沢物体14における少なくとも投光部102及び受光部104の光軸と対向する領域を、布16で被う低反射率部材設置段階と、投光部102及び受光部104とを対向させて、投光部102から受光部104が受光する受光量が最大になる位置に投光部102及び受光部104の光軸を合わせる第1光軸調整段階と、鏡18を布16上に設置する高反射率部材設置段階と、投光部102の光軸が光沢物体14から離れる方向へ投光部102の出射方向を傾けることにより、投光部102及び受光部104の光軸を合わせる第2光軸調整段階とを備える。
(もっと読む)
形状測定方法
【課題】多重反射の影響を排除して測定精度を向上させた形状測定方法を提供する。
【解決手段】本発明に係る形状測定方法は、位相シフト法により被検物の三次元形状を測定する形状測定装置を用いた形状測定方法であって、互いに異なる位相を有する縞模様の投影パターンがそれぞれ投影された被検物の複数の画像情報に基づいて、被検物の画像における投影パターンの多重反射の影響を排除する第1のステップ(S101〜S105)と、第1のステップで多重反射の影響を排除した被検物の画像に基づいて、被検物の三次元形状を測定する第2のステップ(S106〜S107)とを有している。
(もっと読む)
3次元形状測定装置及び測定方法
【課題】3次元形状測定で使用する取得した画像中のパターン部分の画像を高いS/N(SN比)で抽出でき、測定精度と繰り返し性を向上できる3次元形状測定装置を提供すること。
【解決手段】被測定物に所定のパターンを有する測定光を投射する投射部(パターン投射部1)と、前記投射部を、前記被測定物に前記測定光を投射するオン状態と、前記被測定物に前記測定光を投射しないオフ状態とに制御する投射制御部(パターン投射制御コントローラ2)と、前記パターンの画像が前記被測定物の画像上に重なったパターン重畳画像と、前記被測定物に前記測定光が投射されないときの、前記被測定物の画像である背景画像とをそれぞれ取得する画像取得部(カメラ3)と、前記パターン重畳画像の画像データから前記背景画像の画像データの成分を除去して前記パターン画像の画像データを抽出する画像処理部と、を備える。
(もっと読む)
101 - 120 / 195
[ Back to top ]