
Fターム[2F065DD12]の内容
光学的手段による測長装置 (194,290) | 目的 (6,263) | 外乱成分対策 (899) | 迷光 (195)
Fターム[2F065DD12]に分類される特許
41 - 60 / 195
スキャナ装置および物体の三次元形状測定装置
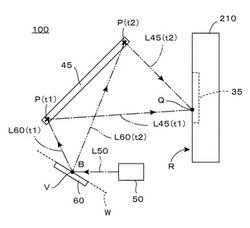
【課題】コヒーレント光源を用いて線状パターンの投影を行いつつ、投影面でのスペックルの発生を抑制する
【解決手段】レーザビームL50を、光ビーム走査装置60によって反射させ、ホログラム記録媒体45に照射する。ホログラム記録媒体45には、走査基点Bに収束する参照光を用いて線状散乱体の像35がホログラムとして記録されている。光ビーム走査装置60は、レーザビームL50を走査基点Bで屈曲させてホログラム記録媒体45に照射する。このとき、レーザビームの屈曲態様を時間的に変化させ、屈曲されたレーザビームL60のホログラム記録媒体45に対する照射位置を時間的に変化させる。ホログラム記録媒体45からの回折光L45は、ステージ210の受光面R上に線状散乱体の再生像35を生成する。受光面Rに物体を載置すると、ホログラム再生光により線状パターンが投影されるので、その投影像を撮影して物体の三次元形状測定を行う。
(もっと読む)
面位置検出装置、露光装置、および露光方法

【課題】反射面を通過した光束に発生する偏光成分による相対的な位置ずれなどの影響を実質的に受けることなく、被検面の面位置を高精度に検出することのできる面位置検出装置。
【解決手段】投射系は、第1反射面7b,7cを有する投射側プリズム部材7を備えている。受光系は、投射側プリズム部材に対応するように配置された第2反射面8b,8cを有する受光側プリズム部材8を備えている。第1反射面および第2反射面を通過した光束の偏光成分による相対的な位置ずれを補償するための位置ずれ補償部材をさらに備えている。
(もっと読む)
ワーク外形形状検出方法及び画像処理システム
【課題】
安価なモノクロカメラを使用するとともに撮像画像の画像データ処理を少なくして画像処理を高速に行うことができ、撮像時にワークの影が発生してもワーク外形の検出に影の影響を排除することができ、低コストでワーク外形検出方法及び画像処理システムを提供する。
【解決手段】
第1ステップで取得した撮像画像を床面と支持部の中間値の輝度を閾値として二値化し、二値化した画像データをマスクデータにする。支持部の表面の明度と同レベルの明度を有するワークを、支持部に支持した状態でモノクロカメラによりワーク台とともに撮像し、ワーク撮像画像を取得する。ワーク撮像画像から、マスクデータにおける支持部に関する画像領域52,54を消去して支持部消去画像を取得する。支持部消去画像から、支持部消去部分を含んだワーク外形線57を抽出し、支持部消去部分を補間処理してワーク外形線58を取得する。
(もっと読む)
膜厚測定装置および膜厚測定方法
【課題】簡便な光源を利用した場合であっても光の反射による外乱の影響を抑えて光透過性薄膜の厚さを確実に算出できるようにする。
【解決手段】光透過性薄膜102の表面にレンズが合焦した状態では基板101の表面をフォーカスアウトさせて基板101から反射される光が合焦判定の外乱として作用することを防止する一方、基板101の表面にレンズが合焦した状態では光透過性薄膜102の表面をフォーカスアウトさせて光透過性薄膜102から反射される光が合焦判定の外乱として作用することを防止し、基板体100の平面上の同一箇所(xi,yi)で光透過性薄膜102を含めた基板体100の厚さと光透過性薄膜102を除いた基板101のみの厚さの差分に基いて光透過性薄膜102の厚さを適切に算出する。
(もっと読む)
表面形状の評価方法および評価装置
【課題】第1表面に対向する第2表面による反射像の影響を受けずに被評価物体の表面形状を精度よく評価することができるようにする。
【解決手段】評価装置は、評価対象である板ガラスなどの被評価物体3の表面3aに映し出されたストライプパターン1を、CCDカメラ2によって撮像するように構成されている。ストライプパターン1は、光源の発光面に設けられている。また、被評価物体3の裏面3bには、屈折率が被評価物体3の屈折率に近い反射抑制層20が、裏面3bに接するように配置されている。CCDカメラ2によって撮像された画像は、演算装置としてのコンピュータ4に取り込まれ、コンピュータ4によって画像解析が行われる。
(もっと読む)
車輪形状測定装置
【課題】作業員の技量にかかわらず短時間で精度高く車輪外周面形状を測定することが可能な車輪形状測定装置を提供する。
【解決手段】車輪1におけるフランジ及び踏面を含む外周面2の形状を測定する車輪形状測定装置100であって、筐体(基部)10と、該筐体10内に取り付けられて車輪1の径方向外側から車輪1の外周面2に向かって光線を照射し、その反射光によって該外周面2までの距離を検出する距離測定部30と、筐体10を車輪1に対して位置決めして固定する位置決め手段20と、距離測定部30を筐体10に対して車輪1の軸線O方向にスライド移動可能とさせるスライド手段40と、外周面2における光線の反射にて生じる乱反射光を吸収する乱反射光吸収手段60とを設ける。
(もっと読む)
プリズムおよびその設計方法、ならびに角度センサ
【課題】測定光のプリズムへの入光・出光損失を低減させ、角度センサの検出精度を向上させること。
【解決手段】角度センサ1は、断面二等辺三角形の三角柱形状のプリズム2を備える。入射面2Aと出射面2Bによって規定されるプリズム2の頂角θpは、プリズムの屈折率をnpri、空気の屈折率をnairとすると、以下の関係式(3)を満たす角度である。
θp=2×(90−(sin−1(nair/npri)))・・・(3)
プリズム素材がBK7(屈折率npri=1.5163)であるとき、θpの適正値は97.45〜98の範囲内である。プリズム2の入射面2Aから測定光Lを入光し、境界面2Cで反射光Lrと透過光Ltに分離する。出射面2Bから出射する反射光Lrと境界面2Cから出射する透過光Ltを受光部3r、3tにより検出し、受光部3r、3tの差動出力に基づき、測定光Lの角度を検出する。
(もっと読む)
表面形状計測方法およびその装置
【課題】外乱光が存在する場合でも正確に被計測部材の表面形状を計測することのできる表面形状計測方法およびその装置を提供する。
【解決手段】スリット光画像の長さ方向に直交する画素列を列番号第1列として、第1列目の第1所定範囲内の画素の輝度値から初期中心位置G0を求め、初期中心位置G0を中心とし、第1所定範囲より狭い第2所定範囲(参照光幅)内の画素の輝度値から第1列目の中心位置G1を求める。第2列以降の第i列〜第n列までは、第(i−1)列目の中心位置G(i−1)を中心として第2所定範囲内の画素の輝度値を加重平均して第i列目の中心位置Giを求めて、中心位置G1〜Gnを求めG1〜Gnを接続して表面形状を求める。
(もっと読む)
面ずれ面倒れ測定装置
【課題】面ずれと面倒れを互いに分離して高精度に測定することができ、かつ種々の被検体を測定対象とすることが可能な面ずれ面倒れ測定装置を得る。
【解決手段】回折格子22Aを介して、光軸C22Aに対する波面の進行角度が互いに異なる2つの円錐状光束を第1被検面90Aに照射するとともに、回折格子22Bを介して、光軸C22Bに対する波面の進行角度が互いに異なる2つの円錐状光束を第2被検面90Bに照射する。第1被検面90Aからの戻り光により形成される2つの干渉縞を解析することにより、光軸C22Aに対する第1被検面90Aの面ずれおよび面倒れを求め、第2被検面90Bからの戻り光により形成される2つの干渉縞を解析することにより、光軸C22Bに対する第2被検面90Aの面ずれおよび面倒れを求め、それらの結果から、被検レンズ9の面ずれおよび面倒れを求める。
(もっと読む)
トールボット干渉計およびその調整方法
【課題】トールボット干渉計のセンサ部の傾きを精度良く調整する。
【解決手段】トールボット干渉計は、光源1から発せられて被検光学系Lを通った光を、回折格子3および撮像素子4を含むセンサ部Mに導き、被検光学系の波面を計測する。該干渉計は、光軸OAに沿った方向における被検光学系とセンサ部との位置関係を、波面の計測時とは異なる位置関係であって被検光学系の像点位置に撮像素子が配置されるように設定する機構7,8と、回折格子からの回折光の撮像素子上での光量分布を該撮像素子を用いて測定する測定部5と、光量分布の測定結果を用いてセンサ部の傾き補正量を算出する補正量算出部5と、傾き補正量に応じた光軸に対するセンサ部の傾き調整を行う機構9とを有する。
(もっと読む)
光学式位置検出装置および位置検出方法
【課題】検出用光源から出射された検出光の一部が対象物体で反射せずに光検出器に入射
することに起因する検出誤差を解消することのできる光学式位置検出装置を提供すること
。
【解決手段】光学式位置検出装置10は、検出光L2を出射する複数の検出用光源12、
および対象物体Obで反射した検出光を受光する光検出器30に加えて、検出空間10R
を経由せずに光検出器30に入射する参照光Lrを出射する参照用光源12Rを有する。
検出空間10Rに対象物体Obが存在する状態で、複数の検出用光源12の一部を点灯さ
せる第1検出用光源点灯動作、他の一部を点灯させる第2検出用光源点灯動作、および参
照用光源点灯動作を行うとともに、検出空間10Rに対象物体Obが存在しない状態でも
第1検出用光源点灯動作、第2検出用光源点灯動作および参照用光源点灯動作を行なう。
(もっと読む)
光学式位置検出装置および位置検出機能付き表示装置
【課題】対象物体で反射した光を受光して対象物体の位置を検出する際、対象物体に反射率が異なる箇所が存在していても、対象物体の位置を高い精度で検出することのできる光学式位置検出装置、および位置検出機能付き表示装置を提供すること。
【解決手段】光学式位置検出装置10では、複数の検出用光源12を順次点灯させて検出光L2を出射させ、検出空間10Rに位置する対象物体Obにより反射した検出光L3の一部を光検出器30により受光する。光検出器30としては、互いに異なる波長帯域に感度ピークをもつ第1光検出器31および第2光検出器32が用いられており、第1光検出器31での検出光の検出強度と第2光検出器32での検出光の検出強度との差に基づいて対象物体Obの位置を検出する。
(もっと読む)
情報処理装置、プログラム、および情報処理システム
【課題】三次元形状の測定精度の悪化を抑制する。
【解決手段】対象物への検出光の投光と撮像との第1の投光撮像条件において対象物の所定部分の撮像結果から特定される第1座標データと、第2の投光撮像条件において該所定部分の撮像結果から特定される第2座標データとを取得する取得手段と、第1座標データと、第2座標データとの空間配置関係の一致度に基づいて、第1座標データの各座標が、該所定部分の実際の三次元形状を表現した実座標であるか、該実座標以外の非実座標であるかを判別する判別手段とを備える。第1座標データと、第2座標データとは、第1の投光撮像条件と第2の投光撮像条件との既知の幾何学的な関係に基づいて所定の三次元座標系で表現されており、空間配置関係の一致度は、第1候補座標と、第2候補座標とについての空間配置関係によって算出される。
(もっと読む)
3次元形状測定装置、3次元形状測定付加装置および3次元形状測定方法
【課題】照明光の連続性を確保し、被測定物の視認性や人の作業効率に影響を与えることなく、高精度かつ確実に被測定物の3次元形状を導出する。
【解決手段】3次元形状測定装置110は、被測定物102に特定色の光を投射する投光源150と、被測定物で反射された反射光のうち特定色の反射光を受光し投影像を形成する受光素子160と、2値化された制御信号を生成する信号生成部170と、被測定物に照明光を照射する複数の照明装置120a、120b、120cのうち特定色を含む照明光を照射する照明装置120aを、制御信号が第1状態を示す間消灯する照明制御部162と、制御信号が第1状態を示す間に、受光素子に投影像を形成させる投影像形成制御部172と、受光素子で形成された投影像に基づいて被測定物の3次元形状を導出する3次元形状導出部176とを備える。
(もっと読む)
3次元形状測定装置、3次元形状測定付加装置および3次元形状測定方法
【課題】被測定物の視認性や人の作業効率に影響を与えることなく、高精度かつ確実に被測定物の3次元形状を導出する。
【解決手段】3次元形状測定装置110は、被測定物102に投光する投光源150と、被測定物で反射された反射光を受光し投影像を形成する受光素子160と、2値化された制御信号を生成する信号生成部170と、被測定物に照明光を照射する照明装置120を制御信号が第1状態を示す間消灯する照明制御部162と、制御信号が第1状態を示す間に、受光素子に投影像を形成させる投影像形成制御部172と、受光素子で形成された投影像に基づいて被測定物の3次元形状を導出する3次元形状導出部176とを備える。
(もっと読む)
卵の気室位置検査方法および装置
【課題】卵の気室位置が鈍端中央からどの程度ずれているかといった、ワクチン製造に係る卵へのウイルス接種や卵の漿尿液採取に必要な、精度の高い気室位置の情報を得る。
【解決手段】検査ユニット8aの集光部2を卵5に密着させ、光源11,13から可視光を順次照射する。光源11,13から照射された光の一部は卵5の内部へ入射し、集光部2と卵5が接触する範囲の内側から放射されるので、集光部2と卵5が接触する範囲の内側から放射された光を光電変換部1で受光して受光電圧に変換する。判定演算部は、それぞれの受光電圧の値から気室6の位置の良否を判定する。
(もっと読む)
光学式位置検出装置
【課題】測定頻度を高めることに伴って対象物体の位置検出精度を高めることのできる光
学式位置検出装置を提供すること。
【解決手段】光学式位置検出装置10において、検出用光源12が検出光L2を出射した
際に対象物体Obで反射した検出光を光検出器30で検出して対象物体Obの座標を検出
する。検出空間10Rからみたときに、光検出器30の周りで周方向で並ぶ第1検出用光
源12A、第2検出用光源12B、第3検出用光源12Cおよび第4検出用光源12Dは
、光検出器30からの距離が相違している。また、第1検出用光源12Aと第2検出用光
源12Bとを結ぶ線と、第3検出用光源12Cと第4検出用光源12Dとを結ぶ線とが非
平行で、第1検出用光源12Aと第4検出用光源12Dとを結ぶ線と、第2検出用光源1
2Bと第3検出用光源12Cとを結ぶ線とが非平行である。
(もっと読む)
溶接ワーク形状計測装置
【課題】溶接ワークの開先角が90°以下で様々な角度をとる場合に、溶接対象部における反射スリット光を特定領域に集めるようにカメラ及び投光器を配置することで、本来のスリット光を容易に検出して、安定的に溶接ワークの開先形状を計測する。
【解決手段】溶接ワークWの開先Kにある溶接線Lに対して直交するように投光器2からスリット光Sを照射し、スリット光Sが照射された溶接ワークWの開先Kをカメラ3で撮像する場合に、投光器2とカメラ3とを、溶接ワークWの開先Kがなす開先角θの2等分線Rと溶接線Lとを含む平面H上で、且つ撮像画像G中においてスリット光Sが反射スリット光S’よりも投光器2の照射方向の基側に存在するように配置して、撮像画像Gを投光器2の照射方向の基側から探索してスリット光Sを抽出することにより、溶接ワークWの開先Kの形状を計測する。
(もっと読む)
光学式エンコーダおよび干渉計測装置
【課題】高精度な光学式エンコーダを提供する。
【解決手段】本発明のエンコーダは、移動可能な格子スケールと、前記格子スケールに照射した光束の反射光または透過光を光電変換して、互いに位相差が異なるN相(Nは6以上の整数)の周期信号を生成する複数の受光素子と、前記受光素子で生成された各相の前記周期信号に対してM組(Mは2以上の整数)の係数群を乗算し、該係数群を乗算して得られた値の総和からM相の正弦波状周期信号を生成する増幅器とを有する。
(もっと読む)
検査装置および検査方法
【課題】光学的な測定を行うための照射部および受光部がそれぞれ最小個数でありながらも、被検査基板の測定対象物の光学的な測定を精度良く行うことが可能な検査装置および検査方法を提供する。
【解決手段】レーザー計測器33はレーザー光を照射する照射部33aと測定対象物111で反射された反射光を受光する受光部33bを有し、シャフト333の下端に取り付けられている。シャフト333にはベルト335を介してモータ331の回転駆動力が伝達されるように構成されており、レーザー計測器33はモータ331の回転により向きを変更可能に構成されている。これによって、測定対象物111から見たレーザー光の入射経路L1と反射光の反射経路L2との入受光関係が調整可能になっている。
(もっと読む)
41 - 60 / 195
[ Back to top ]