
Fターム[2F065DD12]の内容
光学的手段による測長装置 (194,290) | 目的 (6,263) | 外乱成分対策 (899) | 迷光 (195)
Fターム[2F065DD12]に分類される特許
61 - 80 / 195
変位/ひずみ計測装置
【課題】計測対象に対する撮像装置の相対的な位置や姿勢を一定に保つことが容易な、あるいは、計測対象に対する相対的な位置や姿勢を容易に調整できる変位/ひずみ計測装置を提供する。
【解決手段】撮像装置2と画像解析装置から構成されて、撮像装置2で計測対象物を撮像した画像を画像解析装置で解析して、当該計測対象物の変位又はひずみを算出する変位/ひずみ計測装置において、撮像装置2に、1個の固定当接部材13と、2個のマイクロメータ14を取り付けて、固定当接部材13とマイクロメータ14のスピンドル14bの先端を計測対象物に当接させる。
(もっと読む)
ハードディスクメディアの検査装置及び検査方法

【課題】本発明は、分光反射強度に含まれる迷光成分を低減し、パターンドディスク表面のパターン形状を精度よくまたはパターン欠陥を確実に検出できるハードディスクメディアの検査装置または検査方法を提供することである。
【解決手段】本発明は、パターンが形成されたハードディスクメディアの表面に複数の波長を含む光を照射し、波長毎に検出される反射光の強度を前記ハードディスクメディアからの反射光を検出する検出器に発生する迷光成分の強度で補正し、前記補正された反射光の強度から分光反射率を算出することを第1の特徴とする。前記補正は、前記ハードディスクメディアからの反射光の強度を前記反射光の短波長領域をカットした状態とカットしない状態で波長毎に検出し、両者の前記反射光の強度との差に基づいて行なうことを第2の特徴とする
(もっと読む)
反射型光学センサおよび画像形成装置
【課題】トナーパターンのトナー濃度や位置を、より高精度に検出できる反射型光学センサを提供する。
【解決手段】発光部E1〜E9を配列した照明系と、受光部D1〜D9を配列された受光系と、共に平凸形状の照射用マイクロレンズアレイLE1〜LE9および受光用マイクロレンズアレイLD1〜LD9とを有し、照射用マイクロレンズの光軸は、対応する発光部E1〜E9の中心を通り発光部に垂直な発光部軸に平行で、この発光部軸に対して受光系側へ所定距離ずれ、各受光用マイクロレンズLD1〜LD9の光軸は、対応する受光部の中心を通り受光部に垂直な受光部軸に対して平行で、受光部軸に対して、照明系に近づく側もしくは遠ざかる側にずれており、照射用マイクロレンズと受光用マイクロレンズとは、レンズ面積、レンズ面曲率半径、レンズ肉厚が、何れも互いに異なり、受光用マイクロレンズのレンズ面積が照射用マイクロレンズのレンズ面積より大きい。
(もっと読む)
回転体位置測定方法
【課題】回転体の位置を高精度に測定する。
【解決手段】回転体6の回転軸に垂直な平面に対して傾斜角度θで反射ミラー8を回転体6に取り付けて、干渉測長手段である光学ユニット10から回転体6の回転軸に沿って照射される入射光20aを反射ミラー8によって反射させて干渉縞を得る。入射光20aの光路を回転軸から径方向にずらした距離Rと、入射光20aの波長λと、傾斜角度θとの関係が、0.4λ<2Rsinθを満たすように設定することで、サイクリックエラーによる測長誤差を低減する。
(もっと読む)
距離測定装置
【課題】外乱光が存在する測定環境においても、測定対象物におけるレーザ反射光の抽出を高速且つ高精度に実行可能な距離測定装置を提供する。
【解決手段】照射方向を変化させながら、測定対象物Wにスリット状のレーザ光を照射する照射装置2と、撮影方向を変化させながら、測定対象物Wで反射したレーザ光の反射光を撮影画像として取り込む撮像装置3と、照射装置2及び撮像装置3の動きを制御する制御装置4と、撮影画像に2値化処理及びラベリング処理を施した処理画像を作成する画像処理部5と、処理画像に含まれる反射光と外乱光とを区別するために用いられる所定の物理量を、ラベリングされた領域ごとに演算する物理量演算部6と、少なくとも2枚の処理画像を比較して、対応する領域の物理量の変化量を算出し、変化量が予め設定した閾値を超過している領域のデータを消去する外乱光消去部7と、を備えた距離測定装置1。
(もっと読む)
光学式位置検出装置及び投射型表示装置
【課題】検出対象物の位置の検出精度の低下を抑制する。
【解決手段】光学式位置検出装置は、物体表面の少なくとも一部で構成される基準面200Pの上方位置に設定された検出空間Sに配置される検出対象物300を光学的に検出するもので、位置検出光L2を出射して検出空間に基準面に沿った位置に応じて変化する光強度分布を形成する位置検出用光源と、検出空間の側方位置に配置され、検出空間で検出対象物により反射された位置検出光を検出する光検出器410と、光検出器の光検出値に基づいて前記検出対象物の位置を検出する位置検出部とを具備する。光検出器は、光検出面411aを備えた検出器本体411と、光検出面の検出空間の側において位置検出光の少なくとも一部を前記光検出面に対して遮光する遮光構造412とを有し、遮光構造は、基準面から出射し直接に光検出面に入射する位置検出光の少なくとも一部を光検出面に対して遮光する。
(もっと読む)
干渉計システム、ステージ装置及び露光装置
【課題】検出結果の誤差を低減することが可能な干渉計システム、ステージ装置及び露光装置を提供すること。
【解決手段】移動体の位置情報を検出する干渉計システムであって、光を射出する光源と、光を分光して射出する分光装置と、移動体に設けられ、分光された光を反射させる移動鏡と、移動鏡を介した光を受光する受光装置と、光が分光装置から射出され移動鏡に入射し当該移動鏡で反射された後に分光装置へ向かう所定の光路を形成する第1光学系と、当該光路を進行した光が分光装置に入射せずに当該光路の進行方向とは逆向きに当該光路を進行するように光を導光する第2光学系と、第2光学系を進行する光のうち所定成分を前記受光装置に入射させ、所定成分以外の成分を光路に入射させないように当該光を分光する第2分光装置とを備える。
(もっと読む)
光学式位置検出装置、ハンド装置および位置検出機能付き表示装置
【課題】光源部から出射された検査光の一部を対象物体の有無にかかわらず強度が一定のブランク光としてモニターして光源部での駆動条件の設定等に利用するとともに、かかるブランク光が対象物体の位置検出を妨げることのない光学式位置検出装置、並びに当該光学式位置検出装置を備えたハンド装置および位置検出機能付き表示装置を提供すること。
【解決手段】光学式位置検出装置10において、光源部11は、検査光L2を出射して検出領域10Rに光強度分布を形成し、対象物体Obで反射した位置検出用反射光L3を第1光検出器30で検出する。また、対象物体Obにより反射した位置検出用反射光L3が入射しない第2光検出器60が設けられており、かかる第2光検出器60には、検出領域10Rを経由しないブランク光L0が入射する。第1光検出器30については、位置検出用反射光L3が入射し、ブランク光L0が入射しない構成とする。
(もっと読む)
試験対象物の幾何学的特性を測定する方法及び装置、並びに光プロファイリング・システム
【課題】試験対象物の第1及び第2表面を干渉法によってプロファイルすることに加えて、第1基準面と第2基準面との間の空間的関係に基づき、試験対象物の幾何学的特性を測定する。
【解決手段】本発明は、試験対象物の幾何学的特性を測定するための方法を特徴とする。この方法は、第1基準面に対して、試験対象物の第1表面を干渉法によってプロファイルする工程と、第1基準面とは異なる第2基準面に対して、試験対象物の第2表面を干渉法によってプロファイルする工程と、第1基準面と第2基準面との間の空間的関係を提供する工程と、干渉法によってプロファイルした表面、並びに第1基準面と第2基準面との間の空間的関係に基づいて、試験対象物の幾何学的特性を計算する工程とを含む。ある実施形態では、この空間的関係は、校正済みのゲージ・ブロックを使用することによって、または変位測定干渉計を使用することによって測定することができる。対応するシステムも説明される。
(もっと読む)
複屈折基板の板厚測定法及び板厚測定装置
【課題】複屈折基板の板厚を正確に求める板厚測定法を得る。
【解決手段】予め複屈折基板の板厚tと反射干渉光強度波長特性の振幅の節に対応した波
長λ(t)との関係を求めるステップと、前記基板の反射干渉光強度波数特性を取得する
ステップと、前記反射干渉光強度波数特性の節より波数の大きい領域の前記反射干渉光強
度波数特性のデータに対し、相隣接する2つのデータのうち波数の大きい側のデータから
波数の小さい側のデータを減じ、それに−1を乗じた値を求め、この値を波数の小さい側
のデータに加算した新データで、波数大きいデータを置換して補正反射干渉光強度波数特
性を求めるステップと、前記補正反射干渉光強度波数特性にFFT処理を施して、複屈折
基板の板厚を求めるステップと、を含む複屈折基板の板厚測定法である。
(もっと読む)
研磨された原石のインクルージョンの検出
3Dモデルを生成し、および/またはダイヤモンドのような研磨原石におけるインクルージョンを検出する、方法および機器について示した。原石は、一連の個別の増分で回転される。原石の各回転位置では、原石に平行光が照射され、輪郭画像が記録される。また、原石には、各回転位置で、(更なる回転の前に)拡散光が照射され、拡散画像が記録される。画像は、解析され、原石の表面の3Dモデルが取得される。次に、拡散画像において、特徴物が同定され、これは、後続の拡散画像の間でトラックされる。トラック化特徴物は、原石による光線の反射および屈折を考慮して、原石の3Dモデルに対して配置される。その後、特徴物のいくつかまたは全てがインクルージョンとして同定される。 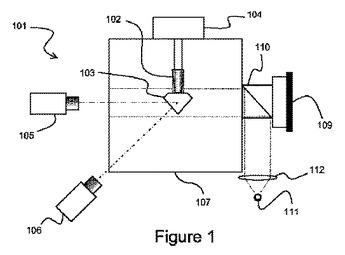 (もっと読む)
(もっと読む)
光電変換素子、受光装置、受光システム及び測距装置
【課題】光電変換によって得られた光電子を所望の領域に高速に移動させ、集積させるようにして、測距装置や受光システム等を実現できるようにする。
【解決手段】光を検知して光電子に変換する第1光電変換素子10Aは、半導体基体12上に絶縁体を介して形成された電極16を有する1つのMOSダイオード18と、半導体基体12に形成された複数の埋め込みフォトダイオードBPDとを有する。MOSダイオード18の電極16は、上面から見たとき、1つの電極部位20から複数の枝分かれ部位22に分岐配列されたくし歯形状を有し、複数の埋め込みフォトダイオードBPDは、上面から見たとき、電極16における複数の枝分かれ部位22間にそれぞれ入れ子状に配置されている。
(もっと読む)
計測システムおよび計測方法
様々な計測システムおよび計測方法が提供される。 (もっと読む)
三次元形状測定装置および三次元形状測定方法
【課題】多重反射の影響を抑えて測定精度を向上させた三次元形状測定装置を提供する。
【解決手段】三次元形状測定装置1が、測定対象物5に対して周期的な光強度分布を有した縞パターン15を投影するパターン投影部10と、測定対象物5に投影された縞パターン15を撮像するパターン撮像部20と、パターン撮像部20に撮像された縞パターン15の画像に基づいて、測定対象物5の三次元形状を測定する画像処理部31とを備え、パターン投影部10は、縞パターン15を領域分割した複数の分割縞パターンを個別に測定対象物に対して投影可能に構成され、パターン撮像部20は、個別に測定対象物に投影された分割縞パターンを撮像し、画像処理部31は、複数の分割縞パターンについてパターン撮像部20にそれぞれ撮像された分割縞パターンの画像に基づいて、測定対象物の三次元形状を測定するようになっている。
(もっと読む)
撮像装置及びその制御方法
【課題】撮像対象との距離を表す距離画像を生成する際に、撮像対象の光反射やその光沢などの外乱、測定原理等に起因する距離の誤差の低減を実現する。
【解決手段】撮像対象との距離を計測するための画像を撮像する第1の撮像手段110と、第1の撮像手段110で撮像された画像に基づくデータを用いて撮像対象までの距離を算出する距離算出手段130と、偏光成分を計測するための画像を撮像する第2の撮像手段122と、第2の撮像手段122で撮像された画像に基づくデータを用いて偏光状態の解析処理を行う偏光解析手段140と、距離算出手段130で算出された距離に係る距離情報103及び偏光解析手段140で解析処理された偏光状態に係る偏光解析情報105に基づいて、撮像対象の距離画像106を生成する距離画像生成手段150を備える。
(もっと読む)
トロリ線摩耗量検出光学系およびトロリ線摩耗量測定装置
【課題】
装置高さが低くかつ小型化が可能なトロリ線摩耗量検出光学系およびトロリ線摩耗量測定装置を提供することにある。
【解決手段】
この発明は、レール横断方向に配列された単色光光源複数個によりスリット状の投光光を生成してトロリ線の摺動面に照射する投光ユニットを設け、投光ユニットを所定の周期でパルス駆動することで投光光をパルス状の光としてトロリ線の摺動面に照射する。そして、投光光が照射されたときとそうでないときのトロリ線からの反射光をの受光信号の差により摺動面についての検出信号を得る。
(もっと読む)
光学ユニット、干渉装置、ステージ装置、パターン形成装置およびデバイス製造方法
【課題】 迷光の混入を防止して高精度に干渉計測を行うことのできる光学ユニットを提供する
【解決手段】 光学ユニット(301)は、相互に偏光面が直交する第1の偏光(E1)及び第2の偏光(E2)の一方を透過させて他方を反射させる第1偏光分離面(S11)及び第2偏光分離面(S12)を含み、第1ビーム及び第2ビームを相互に分離して異なる方向に射出させる偏光分離部(201)と、該第1ビームの偏光状態を変化させる第1偏光変換部(15)と、偏光分離部から射出した第2ビームを反射して偏光分離部に再入射させる固定反射部(18)と、該第2ビームの偏光状態を変化させる第2偏光変換部(17)と、第1ビーム及び第2ビームを、各々その入射位置と異なる射出位置から各々その入射方向に逆向きに射出させて偏光分離部に再入射させるリトロレフレクター(14)と、を備える。
(もっと読む)
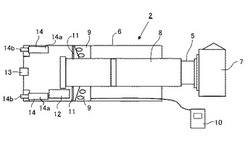
光学式膜厚測定装置およびこれを備える真空成膜装置
【課題】 投光部および受光部が近接し、かつ、これらの前側にカバーガラスが設けられている構成の光学式膜厚測定装置において、カバーガラスに起因する迷光の影響を有効に抑制し、測定精度を向上させる。
【解決手段】 投光部121aの投光面122aおよび受光部121bの受光面122b同士の間隔をdと定義し、投光面122aおよび受光面122bとカバーガラス14との間隔をLと定義し、投光部121aの開口数をNA1 、受光部121bの開口数をNA2 と定義すれば、カバーガラス14は、0<L<d/(tanθ1 +tanθ2 )を満たす位置に設けられる。但し、θ1 =sin-1 (NA1 )であり、θ2 =sin-1 (NA2 )であり、θ1 およびθ2 はいずれも90°未満である。
(もっと読む)
走行支援制御装置
【課題】スミアの発生方向を考慮してCCDイメージセンサのカメラ(CCDカメラ)の設置を工夫することなく、簡単なエッジ検出の画像処理により撮影画像のスミアの除去および高輝度のノイズの低減の両方が同時に行なえるようにする。
【解決手段】画像処理ユニット3の水平エッジ検出部31、垂直エッジ検出部32により、CCDカメラ2の撮影画像Piの水平方向エッジ画像Phおよび垂直方向エッジ画像Pvを生成する。このとき、スミアがCCDカメラ2の撮影画像Piの垂直、水平いずれかの方向に発生しても、両方向のエッジ画像Ph、Pvのいずれか一方にのみスミアが含まれ、他方にはスミアが含まれなくなる。そして、画像処理ユニット3の論理積演算部33により両エッジ画像Ph、Pvの論理積を演算し、演算結果の区分線の検出対象の画像Phvとしてスミアが除去された画像Phvを形成し、同時に、撮影画像Piに散在する高輝度のノイズも低減する。
(もっと読む)
コヒーレント照明イメージング・システムにおけるスペックル雑音の低減
【課題】
コヒーレント照明イメージング・システムにおいて、スペックル雑音による画像の劣化を低減する。
【解決手段】
コヒーレント光源により照明されたオブジェクトの画像や、干渉縞パターンにより照明されたオブジェクトの画像等におけるスペックル雑音を低減する方法及び装置について記述した。一の方法では、投影軸に沿って投影されたコヒーレント放射の構造的な照明パターンによりオブジェクトが照明される。上記投影軸の角度方向が、画像取得期間に或る角度範囲において変調される。好ましくは、画像取得の間は、オブジェクトの表面に投影された構造的な照明パターンの形状特徴は変化せず、スペックル雑音の低減された画像が取得される。構造的な照明パターンとして、照明されたオブジェクトの表面情報を取得する3D測定システムにより生成される干渉縞パターンなどの縞パターンを用いることができる。
(もっと読む)
61 - 80 / 195
[ Back to top ]