
Fターム[2F065EE11]の内容
光学的手段による測長装置 (194,290) | 補償;補正 (1,944) | スケール誤差 (79)
Fターム[2F065EE11]に分類される特許
1 - 20 / 79
移動体駆動方法及び移動体駆動システム、パターン形成方法及び装置、露光方法及び装置、並びにデバイス製造方法
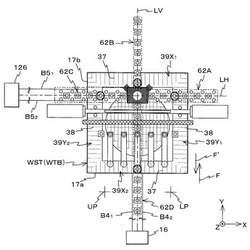
【課題】 エンコーダで位置を計測しつつ、移動体を所望の方向へ精度良く駆動する。
【解決手段】 駆動装置により、ウエハステージWSTのY軸方向の位置情報を計測するエンコーダ62Aの計測値とそのエンコーダによって計測されるスケール39Y1の平面度に関する情報とに基づいて、ウエハステージWSTがY軸方向に駆動される。この場合、駆動装置は、そのエンコーダの計測値に含まれるスケールの平面度に起因する計測誤差をスケールの平面度に関する情報に基づいて補正した補正後の計測値に基づいて、ウエハステージを所定方向に駆動することが可能である。従って、スケールの凹凸に影響を受けることなく、エンコーダを用いてウエハステージを精度良く所定方向に駆動することが可能となる。
(もっと読む)
カメラ状態測定装置およびカメラ状態測定方法

【課題】ステレオカメラの設置状態を、簡単にかつ精度良く測定することができるカメラ状態測定装置を提供すること。
【解決手段】カメラ状態測定装置100は、ステレオカメラの設置状態に関し、ステレオカメラの撮影画像から、特徴点を抽出する特徴点検出部130と、特徴点検出部130で検出された特徴点のうち、基準面上に位置する2点の指定をユーザから受け付ける計測点指定部150と、上記2点についての対カメラ距離d1、d2を取得する対カメラ距離測定部180と、上記2点にいての対カメラ角θ1、θ2を取得する対カメラ角測定部190と、上記d1、d2、θ1、θ2に基づいて、ピッチ角θ0を算出するピッチ角計算部200と、上記d1、d2、θ1、θ2、θ0に基づいて、カメラ高さhを算出するカメラ高さ計算部210とを有する。
(もっと読む)
ネイルプリント装置及び印刷制御方法
【課題】複数回印刷ヘッドを走査して爪部に印刷を施す場合に、n回目の走査終了後n+1回目の走査までの間に指が動いてしまった場合でも、走査ごとの画像のずれを防いで高品質の印刷を行うことのできるネイルプリント装置及び印刷制御方法を提供する。
【解決手段】爪部Tを複数の領域に分けて複数回の走査により1つのデザイン画像を印刷する場合に、各回の走査開始前(S3)に爪部Tの位置情報を取得する(S2)とともに、n+1回目の走査を開始する前に、n回目の走査開始前の爪部Tの位置情報とn+1回目の走査開始前の爪部Tの位置情報とを比較して(S8)爪部Tの位置変化を検出して(S9)、n+1回目の走査開始前に爪部Tの位置変化が検出されたときは、爪部Tの位置変化に応じて、n+1回目の走査を行う際の印刷開始位置を補正し(S10)、この補正後の印刷開始位置から、次の印刷を開始するように印刷制御する(S9)。
(もっと読む)
ワークテーブルのピッチエラーの測定方法
【課題】多数の板材を連続的に加工する加工機に好適な回転テーブルの回転角の誤差(ピッチエラー)を測定する方法に関し、ワークの連続加工中においても自動測定できるようにする。
【解決手段】ワークと略同形で、表面に所定角度毎に引いた放射状の計測線と、計測線の放射中心を検出させるマークを表示した測定用基板を用いる。加工機に設けられている搬入誤差検出手段により、テーブル上に搬入された測定用基板の中心の位置偏倚及び角度偏倚を検出し、次にテーブルを所定角度ずつ回動したときのカメラの画像上での各計測線の位置を検出し、先に検出した基板中心の偏差で補正した計測線の方向と、その本来の方向との差から、テーブルのピッチエラーを測定する。
(もっと読む)
移動体駆動方法及び移動体駆動システム、パターン形成方法及び装置、露光方法及び装置、デバイス製造方法、計測方法、並びに位置計測システム
【課題】面位置センサの設置位置を計測し、該計測された設置位置に基づいて面位置センサを用いて移動体の2次元移動面の垂直方向と傾斜方向の位置座標を計測することにより、移動体を安定かつ高精度に駆動する。
【解決手段】 干渉計システムを用いてウエハステージWSTのXY位置を監視しながらウエハステージを移動させて、面位置センサ72k,74i,76jを用いてYスケール39Y3,39Y4を、X軸方向及びY軸方向に走査することにより、面位置センサのXY設置位置を計測する。得られた設置位置情報に基づいて、面位置センサを用いて、ウエハステージのXY平面(移動面)に対する垂直方向と傾斜方向の位置座標を計測することにより、ウエハステージを安定かつ高精度に駆動する。
(もっと読む)
三次元形状計測装置及び三次元形状計測方法
【課題】カメラ、レーザの相対位置を高精度で設置する必要がなく、また、測定レンジを複数種類を単一の測定プログラムにより変更する。
【解決手段】レーザ線条光照射部12と、既知形状の基準模様群を表示面に表示した座標変換テーブル作成用印刷表示板16と、照射部位の光切断面及びレーザ照射平面上に設置される表示板16を撮影するカメラ11と、表示板16の基準模様群を撮影したカメラ上の座標データを抽出する基準座標抽出手段131とから基準模様群の座標データと基準座標抽出手段131で抽出されたカメラ上の座標データとの対応関係を示す座標変換テーブル133を作成する。形状測定時には、表示板16を外して同じ位置に被測定物を配置させ、レーザ線条光を照射して照射部位の光切断面を撮影した画像から、点群抽出手段134により光切断面の点群を抽出する。抽出した点群座標を近似処理手段135により座標変換テーブル上の値に近似する。
(もっと読む)
光学式検査装置、検査システムおよび座標管理用ウエハ
【課題】欠陥座標に含まれている誤差を低減可能な光学式検査装置を提供する。
【解決手段】チャンネルが配列されたラインセンサと、ウエハをステージに載せてラインセンサに対して移動させる移動手段と、行列の行毎に1つ且つ列毎に1つ擬似欠陥ダイが形成され擬似欠陥ダイには複数の擬似欠陥が列方向に一列に形成されている座標管理用ウエハを検査したのを受けてチャンネル上に結像した擬似欠陥のステージ上の位置を擬似欠陥ステージ座標Xs0として検出するステージ位置検出手段と、擬似欠陥ステージ座標Xs0を擬似欠陥ダイ座標に変換する座標変換手段と、設計座標に対する擬似欠陥ダイ座標の差分ΔXを算出する差分算出手段と、擬似欠陥ステージ座標Xs0に対して差分ΔXが一定の振幅A1で振動し直線L1に沿って増加又は減少する座標誤差特性パターンCP1を取得する特性パターン取得手段とを有する。
(もっと読む)
ラインセンサカメラのキャリブレーション装置およびキャリブレーション方法
【課題】カメラパラメータを用いることなく簡単に高精度の「pixel→高さ」換算式を求めることを可能とする。
【解決手段】長方形状に形成されその表面に白色領域1wと黒色領域1bとを交互に配されてなるキャリブレーション用機材1と、キャリブレーション用機材1の長手方向を撮影するように配設されたラインセンサカメラ2と、ラインセンサカメラ2から出力される画像信号に基づいてラインセンサカメラ2のキャリブレーションを行う処理用コンピュータ3とを備え、白色領域1wと黒色領域1bの幅がそれぞれ同一幅であるとともに白色領域1wと黒色領域1bとの境界線がキャリブレーション用機材1本体の長手方向に対して所定の角度θだけ傾斜するように構成した。
(もっと読む)
エンコーダ及び校正方法
【課題】ポリゴンミラーなどの静止物体の校正に使用されるエンコーダに有用な技術を提供する。
【解決手段】光源と、マークが一定のピッチで配列され相対移動するスケールと、スケールのピッチによって決定される周期の整数分の一の大きさの周期で偏光方向が回転する直線偏光を生成する光学系と、生成された直線偏光を第1直線偏光と第2直線偏光とに分割する分割部と、固定配置された第1偏光板を含み、スケールが相対移動する間における、第1偏光板を通過した第1直線偏光の偏光方向の回転の数を得る第1ユニットと、直線偏光の偏光方向に対して回転する第2偏光板を含み、スケールが静止したときにおける第2直線偏光の偏光方向を検出することによってスケールが静止したときにおける直線偏光の1回転内の位相を得る第2ユニットと、第1ユニットおよび第2ユニットにより得られた結果を統合してスケールの移動量を出力する出力部と、を備える。
(もっと読む)
測定装置、露光装置及びデバイスの製造方法
【課題】物体の位置の測定に有利な技術を提供する。
【解決手段】第1ヘッド112a、112c又は第2ヘッド113aで第1物体に対する第2物体の相対的な位置を測定する第1測定部110と、第1物体に対する第2物体の相対的な位置を求める処理を行う処理部と、を有し、処理部は、第1ヘッド112a、112c及び第2ヘッド113aのうち一方のヘッドで以前に検出された回折格子111a、111b上の位置を他方のヘッドの視野の中心に位置決めした状態で一方のヘッドで以前に検出された回折格子上の位置とは別の位置を一方のヘッドで検出する処理を、一方のヘッドが回折格子の全面を検出するまで繰り返して回折格子の変形量を求める第1処理と、回折格子の変形量に基づいて、第1ヘッド112a、112c又は第2ヘッド113aで測定された第1物体に対する第2物体の相対的な位置を補正する第2処理と、を行う。
(もっと読む)
レジストの光学特性を変化させる方法及び装置
【課題】集積回路のような電子素子の製造において、光計測を用いた測定の精度を改善する方法及びシステムを提供する。また、調節可能なレジストの光学特性を変化させる方法及びシステムを提供する。
【解決手段】その調節可能なレジスト層は反応性ガス、液体、プラズマ、放射線若しくは熱エネルギー又はこれらを結合させたものを用いて処理されて良い。それによってフォトレジストは露光前に第1組の光学特性と異なる第2組の光学特性を得て、露光波長で又はその近傍の放射線に対して透明ではなくなり、OTSM構造420が光線425、426及び427を反射する。
(もっと読む)
カメラ校正方法
【課題】ステレオ法を用いた三次元測定に適したカメラ校正を行い、三次元位置の測定における測定精度を向上させることができるカメラ校正方法を提供すること。
【解決手段】複数の特徴点が設けられ、各特徴点の相対位置が既知である校正器を撮像する(S2)。撮像した校正器の画像情報から校正器の特徴点を抽出する(S3)。2つのカメラそれぞれのカメラパラメータの初期値を算出する(S4)。算出したカメラパラメータを用いて、2つ以上の特徴点の三次元位置座標を算出する(S5)。三次元位置座標を算出した各特徴点のうち、2つの特徴点間の距離を算出する(S6)。算出した距離と実際の距離との誤差を算出する(S7)。算出した誤差を用いてカメラパラメータの修正量を算出する(S8)。算出した修正量の分、カメラパラメータを修正して更新する(S9)。
(もっと読む)
形状測定装置の校正方法、形状測定装置、校正用ターゲット
【課題】光断面式により形状を測定する形状測定装置の校正を、校正用ターゲットを頻繁に移動させることなく行うことのできる形状測定装置の校正方法、形状測定装置及び校正用ターゲットを提供する。
【解決手段】底面形状及び寸法が既知である柱体の校正用ターゲット20に、校正用ターゲット20の底面形状における複数の特徴点に対応し、該底面と平行に配置された複数の発光点を含む少なくとも3組の発光体群21〜23を、校正用ターゲット20の柱体高さ方向の位置が異なり、且つそれぞれの前記特徴点と該特徴点に対応する前記発光点各々とが同一直線上に位置するように並設し、発光体各々及びラインレーザの撮像画像と射影変換で複比が不変であることとに基づいて校正用ターゲット20の特徴点の位置座標を同定し、装置校正を行う。
(もっと読む)
露光装置及び露光方法、並びにデバイス製造方法
【課題】移動体を精度良く駆動する。
【解決手段】 ウエハWを保持し所定面内で移動するウエハステージWSTと、所定面内と実質的に平行に配置される移動スケール44A〜44Dに、複数のヘッド48a〜48kを介してそれぞれ所定平面と交差する方向からビームを照射して、ウエハステージWSTの位置情報を計測するエンコーダシステムと、エンコーダシステムの計測情報に基づいてウエハステージWSTを制御する制御システムによって、複数のヘッド48a〜48kのうち移動スケール44A〜44Dと対向する複数のヘッド48a〜48kの数が変化するとともに、ウエハステージWSTの移動によって、複数のヘッド48a〜48kのうち位置情報の計測に用いられるヘッドが別のヘッドに切り換わる。
(もっと読む)
3次元データと2次元データの統合方法及びこれを用いた見守りシステム、監視システム
【課題】距離画像データ等の3次元データと2次元画像データとの対応付け、距離画像データと2次元画像データを相補的に用いることにより柔軟で信頼性の高い認識結果が得られる、3次元データと2次元画像データの統合方法およびそれを用いた頑健な監視・見守りシステムを提供する。
【解決手段】システムは、2次元データを取得する2次元データ取得ステップと、3次元データを取得する3次元データ取得ステップと、上記2次元データと前記3次元データの位置を対応付ける対応付けステップと、上記対応付けステップで対応付けた結果に基づいて上記3次元データを2次元データ上に重畳する重畳ステップとを備える。
(もっと読む)
物流システムにおける自動計測装置
【課題】大量の輸送貨物量の発生する現代社会および今後において、物流の自動化、システム化はますます重要になっている。物流システムの効率化、コストダウンにおいて形状、寸法、重量、温度、色、模様などの物性、個別認識情報の一括計測、情報管理が自動化、システム化の要件であるが高速、軽量簡便な計測センサーを実現させ合理化を進める。
【解決手段】形状寸法計測センサーとしてCCDカメラ120〜122を利用し、重量計109その他のセンサー、装置を併用して形状、寸法、物性、個別管理情報の一括計測を可能にし、物流の自動化システム化を計る。
(もっと読む)
パターン形成装置、マーク検出装置、露光装置、パターン形成方法、露光方法及びデバイス製造方法
【課題】移動体の位置を高精度に制御しつつ、物体上の複数のマークの検出時間を短縮する。
【解決手段】 露光装置は、ウエハWを保持してXY平面内で移動するとともに、上面にY軸方向を周期方向とする格子を有する一対のYスケール39Y1、39Y2が設けられたウエハステージWSTと、X軸方向に関して検出領域の位置が異なる複数のアライメント系AL1、AL21〜AL24と、X軸方向に関して前記複数の検出領域の両外側に1つずつ配置される一対のYヘッド64y1、64y2を含む複数のYヘッド64を有し、一対のYスケールの少なくとも一方と対向するYヘッドによって、ウエハステージWSTのY軸方向の位置情報を計測するYエンコーダと、を備えている。このため、ウエハステージWSTのY軸方向の移動の際に、ウエハ上の複数のマークを複数のアライメント系で同時に計測可能になる。
(もっと読む)
画像処理プログラムおよび画像処理装置
【課題】カメラの取り付け位置や取り付け姿勢の情報を迅速かつ精度良く得ることを課題とする。
【解決手段】設定部232は、4個のマーカーが映し出された画像平面上の4個に対応するカメラ座標系における仮想的な4つの対応点の中から基準マーカーとする点Mを選択する。そして、設定部232は、基準点Mまでの距離L0に所定の値を設定する。作成部233は、基準点M以外の点、つまり基準マーカー以外のマーカーに対応する点1〜点3までの各距離L1,L2,L3を表す数式を作成する。導出部234は、設定部232により設定された基準マーカーで採用する全ての符号パターンを導出する。棄却部235は、導出部234により導出された符号パターンの中から、距離L1、L2、L3の値の少なくとも1つが相応しい値となり得えない符号パターンを棄却する。
(もっと読む)
球体の位置測定装置及び方法
【課題】円軌道上を公転する球体の位置を好適に測定することができる球体の位置測定装置を提供する。
【解決手段】球体の位置測定装置は、円軌道の中心線O上に中心を有するリング照明18と、前記中心線O上に配置されたレンズ20を有し、前記中心線Oを含む範囲で前記球体13を撮像する撮像部17と、前記撮像部17によって撮像された画像中における、前記球体13の表面で反射した前記リング照明18の反射光を認識し、この反射光の領域の重心位置を求める画像処理部22と、を備える。
(もっと読む)
加工位置の計測方法
【課題】第mの加工位置と第nの加工位置とのずれを精度よく計測することのできる加工位置の計測方法の提供を目的とする。
【解決手段】加工位置の計測方法は、第mの加工を施すとともに、第mのマーク26、及び、基準寸法を示す基準マーク29を形成し(S2)、第nの加工を施すとともに、第nのマーク27を形成し(S7)と、第mのマーク26及び第nのマーク27の相対的位置を測定するとともに、測定した基準寸法L1と基準寸法L0との比にもとづいて、第mのマーク26と第nのマーク27との相対的位置を補正し、第mの加工位置と第nの加工位置との加工位置のずれを計測する(S9)方法としてある。
(もっと読む)
1 - 20 / 79
[ Back to top ]