
Fターム[2F065EE12]の内容
光学的手段による測長装置 (194,290) | 補償;補正 (1,944) | スケールの曲がり (20)
Fターム[2F065EE12]に分類される特許
1 - 20 / 20
検査装置及び方法
【課題】スポット溶接部の有無及び位置を精度良く計測することができる検査装置及び検査方法を提供する。
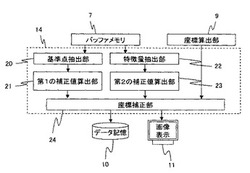
【解決手段】取得画像上のスポット溶接部を抽出する溶接部抽出部と、抽出したスポット溶接部の座標を算出する座標算出部9と、光線によって計測対象物上に指し示された3点以上の基準点を取得画像から抽出する基準点抽出部20と、抽出した取得画像上の基準点の座標を基に正対対象物に対する計測対象物の傾斜及び倍率のずれに起因する誤差を補正する補正値を算出する第1の補正値算出部21と、取得画像上の計測対象物の特徴量を抽出する特徴量抽出部22と、抽出した特徴量から計測対象物の蛇行及び撮像軸周りの回転に起因する誤差を補正する補正値を算出する第2の補正値算出部23と、補正値算出部21,23で算出した補正値によりスポット溶接部の座標を補正する座標補正部24とを備えている。
(もっと読む)
光学式検査装置、検査システムおよび座標管理用ウエハ

【課題】欠陥座標に含まれている誤差を低減可能な光学式検査装置を提供する。
【解決手段】チャンネルが配列されたラインセンサと、ウエハをステージに載せてラインセンサに対して移動させる移動手段と、行列の行毎に1つ且つ列毎に1つ擬似欠陥ダイが形成され擬似欠陥ダイには複数の擬似欠陥が列方向に一列に形成されている座標管理用ウエハを検査したのを受けてチャンネル上に結像した擬似欠陥のステージ上の位置を擬似欠陥ステージ座標Xs0として検出するステージ位置検出手段と、擬似欠陥ステージ座標Xs0を擬似欠陥ダイ座標に変換する座標変換手段と、設計座標に対する擬似欠陥ダイ座標の差分ΔXを算出する差分算出手段と、擬似欠陥ステージ座標Xs0に対して差分ΔXが一定の振幅A1で振動し直線L1に沿って増加又は減少する座標誤差特性パターンCP1を取得する特性パターン取得手段とを有する。
(もっと読む)
三次元形状計測装置及び三次元形状計測方法
【課題】カメラ、レーザの相対位置を高精度で設置する必要がなく、また、測定レンジを複数種類を単一の測定プログラムにより変更する。
【解決手段】レーザ線条光照射部12と、既知形状の基準模様群を表示面に表示した座標変換テーブル作成用印刷表示板16と、照射部位の光切断面及びレーザ照射平面上に設置される表示板16を撮影するカメラ11と、表示板16の基準模様群を撮影したカメラ上の座標データを抽出する基準座標抽出手段131とから基準模様群の座標データと基準座標抽出手段131で抽出されたカメラ上の座標データとの対応関係を示す座標変換テーブル133を作成する。形状測定時には、表示板16を外して同じ位置に被測定物を配置させ、レーザ線条光を照射して照射部位の光切断面を撮影した画像から、点群抽出手段134により光切断面の点群を抽出する。抽出した点群座標を近似処理手段135により座標変換テーブル上の値に近似する。
(もっと読む)
形状測定装置
【課題】安価でかつ幅方向に高い分解能を有することができ、高精度に被測定物体の形状を測定可能にする。
【解決手段】被測定物体1の搬送方向に対し垂直な平面内であってその斜め上方または下方に配置されスリット状光を照射するスリット状光光源2a,2bと、被測定物体1を介しスリット状光光源2a,2bと反対側となる被測定物体1の斜め上方または下方であって、被測定物体1の表面1aまたは裏面1b上に照射されたスリット状光をその照射方向に対し所定の角度だけずれた方向から撮像する撮像部3a,3bと、撮像部3a,3bが撮像した被測定物体表面1aおよび裏面1bの撮像画像の座標を、撮像部3a,3bがスリット状光光源2a,2bからの照射線上で撮像したように変換する座標変換部4a,4bと、その座標変換された撮像画像の座標に基づいて、被測定物体1の断面厚み形状を演算する断面厚み形状演算部5とを有する。
(もっと読む)
カメラ校正方法
【課題】ステレオ法を用いた三次元測定に適したカメラ校正を行い、三次元位置の測定における測定精度を向上させることができるカメラ校正方法を提供すること。
【解決手段】複数の特徴点が設けられ、各特徴点の相対位置が既知である校正器を撮像する(S2)。撮像した校正器の画像情報から校正器の特徴点を抽出する(S3)。2つのカメラそれぞれのカメラパラメータの初期値を算出する(S4)。算出したカメラパラメータを用いて、2つ以上の特徴点の三次元位置座標を算出する(S5)。三次元位置座標を算出した各特徴点のうち、2つの特徴点間の距離を算出する(S6)。算出した距離と実際の距離との誤差を算出する(S7)。算出した誤差を用いてカメラパラメータの修正量を算出する(S8)。算出した修正量の分、カメラパラメータを修正して更新する(S9)。
(もっと読む)
形状測定装置の校正方法、形状測定装置、校正用ターゲット
【課題】光断面式により形状を測定する形状測定装置の校正を、校正用ターゲットを頻繁に移動させることなく行うことのできる形状測定装置の校正方法、形状測定装置及び校正用ターゲットを提供する。
【解決手段】底面形状及び寸法が既知である柱体の校正用ターゲット20に、校正用ターゲット20の底面形状における複数の特徴点に対応し、該底面と平行に配置された複数の発光点を含む少なくとも3組の発光体群21〜23を、校正用ターゲット20の柱体高さ方向の位置が異なり、且つそれぞれの前記特徴点と該特徴点に対応する前記発光点各々とが同一直線上に位置するように並設し、発光体各々及びラインレーザの撮像画像と射影変換で複比が不変であることとに基づいて校正用ターゲット20の特徴点の位置座標を同定し、装置校正を行う。
(もっと読む)
接触式プローブおよび形状測定装置
【課題】 プローブの伸び、及び周辺空気の温度、湿度の影響を抑えた高精度な形状測定を行うことのできる形状測定用の接触式プローブおよび形状測定装置を提供する。
【解決手段】 プローブシャフト2と先端球16を備えた接触式プローブ1において、
前記プローブシャフト2内の測長光路の少なくとも一部に透明体を設けることにより、少なくともこの部分だけ空気に暴露された光路を減らすことができる。その結果、外気の屈折率変化による測定誤差を抑え、精度を向上させることができる。
(もっと読む)
測定装置、測定方法及びステージ装置
【課題】置の大型化を招くことなく移動ステージの位置検出を可能とする測定装置を提供する。
【解決手段】第1軸方向に沿って可動体に第1ビームを出射し、可動体で反射した第1ビームが第1光路で進む前記第1光学部材と、第1軸方向に沿って可動体に第2ビームを出射し、可動体で反射した第2ビームが第2光路で進む第2光学部材と、第1軸方向に沿って可動体に第3ビームを出射し、可動体で反射した第3ビームが第3光路で進む第3光学部材と、第1光路を進んだ第1ビーム、及び第2光路を進んだ第2ビームが互いに干渉する干渉計と、干渉計での干渉に基づいて、第3軸方向における可動体の位置情報を得る算出装置とを備え、第1軸方向に沿って可動体に向かう第3ビームの進路は、第3軸方向について、第1光路の進路と第2光路の進路との間に位置する。
(もっと読む)
ラインセンサカメラの角度調整装置
【課題】2軸の角度調整の操作性と小型化とをバランス良く達成することができる。
【解決手段】基準プレート11と、CCD素子面において走査方向に直交する方向の中心を通る走査方向の第1軸線O1を中心にして回転するあおり調整用プレート20と、あおり調整用プレート20上に搭載され、このあおり調整用プレート20を回転させるためのあおり調整機構21と、CCD素子面に対する法線方向に平行な第2軸線O2を中心にして回転する回転調整用プレート30と、回転調整用プレート30上に搭載されるとともに、この回転調整用プレート30を回転させるための回転調整機構31とを備え、あおり調整用プレート20がカメラ本体5に固定され、回転調整用プレート30に対して回転可能に支持され、回転調整用プレート30が基準プレート11に固定され、各プレート11、20、30がその順で重なって配置された角度調整装置10を提供する。
(もっと読む)
オブジェクト領域とグラウンド領域とを区別する方法及び3次元形状測定方法。
【課題】領域区別方法及びそれを用いた3次元形状測定方法を提供する。
【解決手段】このような3次元形状測定方法は測定対象物が配置された基板に向かって光を照射し測定対象物が配置された基板から反射された光を受光してイメージを取得し、取得されたイメージの検査領域のうち、測定対象物が位置するオブジェクト領域と検査領域のうちオブジェクト領域を除いたグラウンド領域とを設定し、測定対象物が配置された基板に向かってパターン光を照射し測定対象物が配置された基板から反射されたパターン光を受光してパターンイメージを取得し取得されたパターンイメージを用いて検査領域の各地点における測定対象物の高さを取得し、設定されたグラウンド領域の高さを測定対象物に対するグラウンド高さに設定することを含む。
(もっと読む)
撮像装置、画像表示方法、及び画像表示プログラムが記録された記録媒体
【課題】対象物の大きさの指標となる目盛をリアルタイムに撮像画像に重ねて表示することができる安価で簡潔な構成の撮像装置、画像表示方法、及び画像表示のためのプログラムを記録した記録媒体を提供すること。
【解決手段】対象物を撮像し、その撮像画像を表示する撮像装置であって、撮像画像中の対象物の大きさの指標となる目盛を生成する目盛生成部と、目盛に歪曲収差による歪みと同等の歪みを与える形状補正を行うために使用する補正用データを記憶しているデータ記憶部と、補正用データに基づいて目盛に形状補正を行った歪曲目盛を生成する目盛形状補正部と、歪曲目盛を撮像画像に合成する画像合成部を有し、リアルタイムで撮像画像を歪曲目盛と合成して表示する。
(もっと読む)
露光装置、及びそれを用いたデバイスの製造方法
【課題】エンコーダ等の位置計測装置を使用した基板ステージの位置決めを行う際に、スケールの形状に依存する誤差を最小限に抑える露光装置を提供する。
【解決手段】基板5を保持する基板ステージ6と、該基板ステージ6の位置を計測する光学式計測部7と、該光学式計測部7からの計測光の反射対象となるスケール8とを備える露光装置50であって、基板ステージ6が設置された空間内を温度調節するための温調エアを供給する供給系と排気する排気系を有し、供給系は、基板ステージの走査部周辺に温調エアを供給する第1の供給系11、排気系14と、スケール8の設置部周辺に温調エアを供給する第2の供給系13、排気系15とを備える。
(もっと読む)
検査方法
【課題】測定対象物の歪曲を適切に補償した検査領域の設定方法を提供する。
【解決手段】ステージに測定対象物を配置し、測定対象物に対する基準データを呼び出し、測定対象物に対する測定データを獲得し、測定対象物に対する測定データと測定対象物に対する基準データから少なくとも一つの特徴オブジェクトを選択し、基準データおよび測定データから選択された特徴オブジェクトに対する少なくとも一つの特徴変数をそれぞれ抽出し、特徴変数および定量化した変換公式を用いて測定対象物の変化量を算出し、算出された変化量を補償して検査領域を設定する。
(もっと読む)
較正方法、露光方法及びデバイス製造方法、並びに露光装置
【課題】移動体に設けられた回折格子の歪みに起因するエンコーダヘッドの計測値を高精度に補正する。
【解決手段】X軸方向を計測方向とするエンコーダヘッド(Xヘッド)667,660とそれらに対向してステージWST上に設けられたXスケール39X1を用いて、ステージWSTのX位置を計測する。ステージWSTをX軸方向に移動させ、X軸方向に所定間隔で設定された計測点毎に、両ヘッド667,660の計測値の差分を求める。全てのステップ位置についての差分より、Xスケール39X1の歪みを求める。同様に、その他のスケールの歪みを計測する。計測された歪みに基づいて、ステージWSTの位置を計測するエンコーダの計測値を補正する。
(もっと読む)
計測方法、露光方法及びデバイス製造方法
【課題】反射鏡の曲がりに起因する干渉計の計測誤差の補正データを作成し、該補正データを用いて計測精度が改善される干渉計を用いて、移動体を高精度に駆動する。
【解決手段】Z干渉計43A,43Bを用いてステージWSTがZ変位しないように制御して、該ステージWSTをY軸方向に駆動しながら、センサ72c,72dを用いてステージWSTの上面のZ変位を計測し、Y干渉計16とZ干渉計43A,43Bを用いてY変位を計測する。これらの計測結果より、Z干渉計43A,43Bの測長ビームB1,B2が投射される固定鏡47A,47Bの曲がりを求める。ここで、2つのセンサ72c,72dを用いてステージWST上面の同じXY位置の面位置を計測して、正味のZ変位を求めることにより、上面の凹凸に起因する計測誤差が生じない、高精度な固定鏡の曲がり計測が可能になる。
(もっと読む)
較正用治具、較正方法、及び該方法を用いたレーザ加工装置
【課題】対象物までの距離測定における直線性の較正を高精度に行う。
【解決手段】予め設定された加工対象領域までの距離を変位センサから得られる変位量に基づいてレーザ光の焦点深度を調整して倣い制御を行いながらレーザ加工を行うレーザ加工装置に使用される前記変位センサの較正用治具において、前記変位センサから出射される計測用レーザ光の照射面は、水平面に対して所定の角度に傾斜するように形成される傾斜部と、前記レーザ加工装置における加工対象物を保持するために設けられたステージ上に載置するための水平な底部とを有し、前記傾斜部の表面は、光学ガラスで形成されていることにより、上記課題を解決する。
(もっと読む)
長さ測定装置、長さ測定方法および長さ測定用コンピュータプログラム
【課題】測定対象物における各端部を撮像する撮像装置を厳格に位置決めして配置する必要がないとともに、撮像装置に対する測定対象物の端面の向きに関わらず測定対象物の長さを精度よく測定することを可能にする。
【解決手段】3次元形状測定装置20A,20Bにおける各座標原点間のワークWKの軸線方向に沿った距離を基準距離L0として記憶しておくとともに、ワークWKの軸線に直交する基準面Pka,Pkbを定義する。次に、3次元形状測定装置20A,20BによりワークWKの端面Sa,Sbを含む各端部を測定し、同端面Sa,Sbを表す平面Pwa,Pwbを定義するとともに、同平面Pka,Pkbを用いて基準面Pka,Pkbに平行な測定用平面Pma,Pmbを定義する。そして、基準距離L0から測定用平面Pma,Pmbと前記各座標原点との距離を減算してワークWKの長さLを計算する。
(もっと読む)
路面画像作成装置と作成方法
【課題】 曲線を描く路面を、曲線を描く路面画像で再現する技術を提案する。
【解決手段】 本発明の路面画像作成装置は、路面を走行する車両と、車両の走行距離を測定する手段と、車両の幅方向には長くて車両の縦方向には狭い視野内の路面を撮影する車載のラインカメラと、車両の縦方向の視野幅に実質的に等しい距離を車両が走行する毎にラインカメラで撮影して得られた撮影データを記憶する手段と、撮影データを記憶した時点におけるラインカメラの視野の位置を決定する手段と、決定した視野の位置と記憶している撮影データに基づいて面的に広がる路面画像を出力する手段を備えている。
(もっと読む)
被検体表面の平面度測定系の系統誤差測定方法
【課題】平面度測定系における系統誤差を正確に同定する。
【解決手段】平面度測定系の系統誤差測定方法において、所定の基準位置にある第1の状態の被検体表面形状をエリアセンサで測定して得た第1の形状データと、第1の状態から回転機構により回転シフトした第2の状態の被検体表面の形状をエリアセンサで測定して得た第2の形状データと、第1の状態から位置決めステージにより所定の方向にリニアシフトさせた第3の状態の被検体表面形状をエリアセンサで測定して得た第3の形状データと、第3の状態から回転機構により回転シフトした第4の状態の被検体表面形状をエリアセンサで測定して得た第4の形状データを用いて、平面度測定系の系統誤差を求める方法において、第2のデータおよび第3のデータを求める際に、回転シフトに伴う偶然誤差を低減するために回転シフトを伴う多数回の測定を行う。
(もっと読む)
キャリブレーションチャート画像表示装置、キャリブレーション装置、キャリブレーション方法
【課題】カメラによるキャリブレーションシートの撮影が容易に行えるキャリブレーションチャート表示装置を提供すること。
【解決手段】所定のキャリブレーション撮影方向から撮影されたキャリブレーションチャート1の画像を記憶する校正画像記憶部59と、校正画像記憶部59に記憶されたキャリブレーションチャート画像を、前記キャリブレーション撮影方向と所定の画像回転角度に応じて表示するキャリブレーションチャート画像表示部61とを備えている。
(もっと読む)
1 - 20 / 20
[ Back to top ]