
Fターム[2F065FF04]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 画像計測、写真計測 (6,129)
Fターム[2F065FF04]の下位に属するFターム
Fターム[2F065FF04]に分類される特許
341 - 360 / 4,968
画像処理装置および方法、記録媒体並びにプログラム
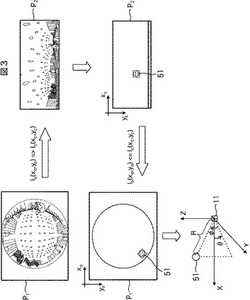
【課題】正確に3次元座標を検出できるようにする。
【解決手段】取得部が、魚眼レンズを介して撮影した画像である魚眼画像を取得し、変換部が、魚眼画像を変換して、変換画像を生成し、認識部が、変換画像から認識対象の画像を認識する。本発明は画像処理装置に適用することができる。
(もっと読む)
表面形状測定装置

【課題】表面形状測定装置の配線系統をできるだけ省き、装置の簡素化を図る。
【解決手段】表面形状測定装置10は、測定対象物12の表面に光を照射する光源14と、測定対象物12の表面上の反射点P1からの反射光を第一の反射光と第二の反射光に分離するビームスプリッタ18と、第一の反射光を反射する第一のミラー20と、第二の反射光を反射する第二のミラー22と、を備えている。さらに、第一のミラー20から反射した第一の反射光及び第二のミラー20から反射した第二の反射光を受光する撮像面30を備える撮像器24を備えている。この撮像器24は、ビームスプリッタ18から第一のミラー20を経由して撮像面30まで到る光路長とビームスプリッタ18から第二のミラー22を経由して撮像面30まで到る光路長とが異なるように配置されている。
(もっと読む)
塗膜劣化予測方法、塗膜劣化予測装置及びコンピュータプログラム
【課題】塗膜の将来の劣化状態を予測できる塗膜劣化予測方法、塗膜劣化予測装置及びコンピュータプログラムを提供すること。
【解決手段】塗膜劣化予測装置1の仮想劣化画像作成手段11は、所定のパラメータ及び時間変数に対応する複数の仮想劣化画像を作成する。対象画像作成手段12は、塗装面の撮影画像から対象画像を作成する。仮想プロファイル作成手段13は、仮想劣化画像の統計量として劣化部の個数f、面積率a、標準偏差sを算出し、f−a−s空間座標上に仮想プロファイルを示す。統計量算出手段14は、対象画像から統計量を算出し、対象値特定手段15は、対象画像に近い仮想プロファイルの統計量を特定し、特定した特定量に対応するパラメータ及び時間変数を特定する。劣化予測画像作成手段16は、特定されたパラメータを劣化進行モデルに入力し、時間変数に特定された値よりも大きい値を入力して、劣化予測画像を作成する。
(もっと読む)
タイヤ表面形状測定装置及びタイヤ表面形状測定方法
【課題】サイドウォール面の厚みやトレッド面の幅が様々に異なるタイヤのそれぞれに対して、同一の画像分解能で且つ高い精度で表面形状を検出する。
【解決手段】タイヤ表面形状測定装置において、タイヤの表面に照射されたライン光を撮像する撮像面が設けられた撮像素子9と、撮像面に結像したライン光の像が全て含まれるように、撮像面上にライン光の像の長手方向長さを備えた有効撮像領域Aを設定する撮像領域設定手段と、設定された有効撮像領域Aから予め定められた所定数の測定信号を抽出する画素データ抽出手段と、を備える。
(もっと読む)
マーク検出方法及び装置、位置制御方法及び装置、露光方法及び装置、並びにデバイス製造方法
【課題】物体上の複数のマークを効率的に、かつ高精度に検出する。
【解決手段】少なくとも1軸方向に関する検出領域が互いに異なる複数のアライメント系で、少なくともその1軸方向に関して互いに異なる位置に配置されたウエハ上のマークを検出するマーク検出方法であって、複数のアライメント系の検出領域にそれぞれウエハ上のマークを移動するステップ315と、ウエハをZ方向にスキャンして複数のアライメント系の検出信号及びデフォーカス量に対応するフォーカス信号を取り込むステップ316と、複数のアライメント系の検出信号とフォーカス信号とからフォーカス信号のオフセットを求めるステップ317とを有する。
(もっと読む)
形状測定装置
【課題】測定範囲および測定精度を調整・変更可能なプローブを備えた形状測定装置を提供する。
【解決手段】ワークに直線状の光を照射する光照射部と、光照射部から照射された光のワークからの反射光を撮像する撮像部30と、を備えたプローブによりワークの表面を非接触に走査して、ワークの表面形状を測定する形状測定装置において、撮像部30は、ワークの画像を撮像する撮像素子31と、ワークからの反射光を撮像素子31の撮像面に結像させる結像レンズ32と、結像レンズ32を交換可能とするマウント部33と、を備える。
(もっと読む)
移動量測定装置および方法
【課題】累積的な移動量および1回測定当たりの移動量の測定精度が共に良好な移動量測定装置。
【解決手段】画像を入力する手段と、入力画像を記憶する手段と、記憶された画像の一部をテンプレート画像として抜き出す手段と、入力画像とテンプレート画像との相関計算によりパターンマッチングをする手段と、パターンマッチングの結果を用いて被測定物の移動量を算出する手段と、を備え、移動量を算出する手段は、固定されたテンプレート画像を用いたパターンマッチングにより計算された移動量と、逐次更新されたテンプレート画像を用いたパターンマッチングにより計算された移動量とを比較し、移動量の差が一定値未満の場合は固定されたテンプレート画像に基づく移動量を選択し、移動量の差が一定値以上の場合は両方の移動量を用いて補正計算することによって、被測定物の移動量を算出する移動量測定装置。
(もっと読む)
測定用工具を合わせるための工具ホルダ、測定装置、及びその測定装置の校正方法
【課題】改良した校正機構によって工具ホルダでより正確な校正を行うことができる測定装置につき、当該測定装置で測定される工具を合わせるための工具ホルダを提供する。更に、そのような測定装置と、その測定装置の校正に適した方法を提供する。
【解決手段】測定装置で測定される工具を合わせるための工具ホルダは、当該工具ホルダの垂直軸を規定する対称軸22を有する固定可能な本体20と、当該工具ホルダに取り付けられる工具用に規定された工具のゼロ点23と、前記工具の前記ゼロ点23から所定の水平距離及び所定の垂直距離を隔てた校正機構24と、を備え、前記校正機構24は、前記工具の前記ゼロ点23を含む垂直線の所定高さに半円状外縁部を備え、前記半円状外縁部の中心角が135°を上回るように構成されている。
(もっと読む)
運転支援装置
【課題】道路のスロープ特性と渋滞予兆とを考慮して燃費を向上させるための車両の運転支援装置の提供。
【解決手段】カメラから路面映像を受信する路面映像入力手段135と、路面映像を鳥瞰変換する鳥瞰変換手段136と、鳥瞰変換された路面映像から複数個の車線を抽出する車線抽出手段137と、抽出された複数個の車線の傾きを算出する傾斜度算出手段138と、複数個の車線の傾の差異値を利用して路面傾斜度を算出する路面傾斜度算出手段139と、自車両の加速度を検出する手段と、検出した加速度の周波数分析から周波数に対応するパワースペクトルを算出する手段と、算出したパワースペクトルの単回帰直線を演算し、所定周波数範囲での当該単回帰直線の傾きの変化量の極大値を傾き極大値として算出する手段133とを備える。運転支援装置は、路面傾斜度が所定値よりも大きく、かつ傾き極大値が自車両前方での渋滞予兆を示す場合に、運転支援をおこなう。
(もっと読む)
原子力発電プラントの蒸気発生器検査装置、蒸気発生器検査方法及びプログラム
【課題】カメラで撮像された目視点検映像からBEC穴の隙間の閉塞率の検査を自動で行うことができる原子力発電プラントの蒸気発生器検査装置、蒸気発生器検査方法及びプログラムを提供する。
【解決手段】蒸気発生器内の管支持板のBEC穴の閉塞状況を検査する原子力発電プラントの蒸気発生器検査装置であって、管支持板のBEC穴の開口形状を撮像する撮像手段と、撮像したBEC穴の画像を記録し、画像から開口形状を示す目視点検画像を抽出して記憶する記憶部と、目視点検画像に対し、3次元形状モデルのデータから生成した基準画像、又は予め記憶部に記憶している基準画像の初期BEC穴の開口形状を重ね合わせる処理をした後、重ね合わせた初期BEC穴の開口形状と目視点検画像の開口形状とからBEC穴の閉塞率を算出する画像処理部と、を有する。
(もっと読む)
三次元モデリング装置、三次元モデリング方法、ならびに、プログラム
【課題】精度良く三次元モデルを作成する。
【解決手段】画像受付部11は、被写体を異なる角度から複数回撮像することにより得られる複数の画像の組の入力を受け付ける。三次元モデル生成部12は、受け付けられた複数の画像の組のそれぞれに基づいて、被写体の三次元モデルを複数生成する。三次元モデル選択部13は、被合成三次元モデルと合成三次元モデルとを選択する。特徴点抽出部14は、被合成三次元モデルと合成三次元モデルから、複数の第1特徴点と第2特徴点を抽出する。特徴点選択部15は、抽出された複数の第1特徴点と第2特徴点の中から、ステレオカメラ1との距離が近い特徴点を優先的に選択する。座標変換パラメータ取得部16は、座標変換パラメータを取得する。座標変換部17は、合成三次元モデルの座標を被合成三次元モデルの座標系の座標に変換する。三次元モデル合成部18は、合成三次元モデルを被合成三次元モデルに合成する。
(もっと読む)
しわ検出装置およびしわ検出方法
【課題】勾配に基づいて、しわを特定できるしわ検出装置を提供する。
【解決手段】しわ検出装置100は、電極およびセパレータが積層されてなる積層体40に対して相対的に移動しながら、最外層のセパレータに対して、スリット光を投光する投光部110と、セパレータ上のスリット光の形状を撮影するカメラ120と、撮影されたスリット光の形状に基づいて、セパレータの表面形状を検出し、検出した表面形状に基づいて、セパレータの勾配を算出し、算出した勾配に基づいてしわを判定する制御部130と、を有する。
(もっと読む)
3次元形状計測装置およびロボットシステム
【課題】3次元形状の計測処理を高速化すること。
【解決手段】スリット状の光線を計測対象物に対する照射位置を変更させながら照射する照射部と、前記光線が照射された前記計測対象物を順次撮像する撮像部と、前記撮像部によって撮像された画像を走査することによって前記画像における前記光線の位置を検出する位置検出部と、前記位置検出部による走査対象の画像よりも以前に前記撮像部によって撮像された画像における前記光線の位置に基づいて前記走査対象の画像における走査領域を決定する走査領域決定部とを3次元形状計測装置へ設ける。
(もっと読む)
帯状部材の継ぎ目形状測定方法とその装置及び変位量計測装置
【課題】測定装置もしくは帯状部材を移動させることなく、帯状部材の継ぎ目形状を精度よく測定する。
【解決手段】レーザー照射手段12によりカーカスプライ20の表面にコードの延長方向に直交する方向に延長するライン光を入射角45°で照射し、その反射光のうちの前面散乱光R1を撮影手段13で直接受光し、正反射光R2を第1の光学素子14で反射させ側面散乱光R3を第3の光学素子15で反射させてそれぞれ撮影手段13に受光させる構成とすることで、前面散乱光R1による画像である上面像G1と、正反射光R2による画像である正面像G2と側面散乱光R3による画像である側面像G3とを撮影し、撮影された上面像G1と正面像G2と側面像G3とを用いてカーカスプライ20の継ぎ目部分を含む照射部を3方位から見たときの変位量h1,h2及びh3を求め、変位量h1,h2及びh3を用いてカーカスプライ20の照射部の厚さを求める。
(もっと読む)
パターン検査方法およびパターン検査装置
【課題】同一仕様で形成され同一方法で保持された複数の平面基板上の、同一箇所に形成された同一パターンの形状を確実に順次検査するための簡単な方法を提供すること。
【解決手段】1枚目の検査対象基板に対して、検査のためのカメラと検査対象となるパターンとの撮像距離を順次変化させて各撮像距離で撮像して合計で複数の画像情報を入力し、入力した複数の画像情報を予め登録してある登録画像情報と比較して、登録画像情報に最も類似した一画像の情報を複数の画像情報の中から選択して、検査判定するとともに、選択した画像情報に対応する撮像距離をカメラ最適高さとして特定し、2枚目以降の平面基板上の同一箇所に形成された同一パターンの形状検査において、カメラ最適高さとした撮像距離で検査することを特徴とするパターン検査方法。
(もっと読む)
開口建具の設置スペースのサイズを求める方法
【課題】人的コストを節約可能であり、測定の利便性を向上可能な開口建具の設置スペースのサイズを求める方法を提供する。
【解決手段】開口建具、すなわちドア又は窓の設置スペースのサイズを求める方法は、少なくとも1つの辺縁を有するドア(窓)設置スペースを提供するステップ(a)と、ドア(窓)設置スペースの一辺に寸法校正部材を設置するステップ(b)と、影像キャプチャ装置を利用し、ドア(窓)設置スペースおよび寸法校正部材を含む影像を取得するステップ(c)と、影像を影像測定システムへ伝送するステップ(d)と、影像測定システムを利用して影像を分析し、ドア(窓)設置スペースと寸法校正部材との比例関係を取り、影像の比例関係と寸法校正部材の実際の寸法とに基づき、ドア(窓)設置スペースの実際の寸法を算出するステップ(e)と、を含む。これにより、人的コストを節約可能であり、測定の利便性を向上可能である。
(もっと読む)
搬送量計測装置および記録装置
【課題】データ処理量を増大させることなく、パターンマッチングに適したパターンを正確にピックアップし、記録用紙上の移動量計測用パターンの正確な移動量を検出する。
【解決手段】記録媒体を所定の搬送方向に搬送する搬送手段を備え、搬送される記録媒体に記録ヘッドを用いて画像を記録する記録装置における記録媒体の搬送量を計測する搬送量計測装置であって、搬送される記録媒体に対して所定範囲の撮像領域を有し、記録媒体の搬送量を計測するための移動量計測用パターンの抽出および移動量計測用パターンの移動量を算出するための画像データを取得するイメージセンサ101−1と、搬送方向のイメージセンサ101−1の上流側に配置された所定範囲の撮像領域を有し、移動量計測用パターンを抽出する範囲を選択するためのイメージセンサ101−1よりも低解像度の画像データを取得するイメージセンサ101−2を有する。
(もっと読む)
移動量測定装置および移動量測定方法
【課題】移動と停止を繰り返すような動きをする移動体の移動量を測定する場合であっても、高精度に測定する。
【解決手段】測定物の画像を入力する手段と、測定物のテンプレートを取得する手段と、前記取得されたテンプレートを保存する手段と、前記測定物の画像と前記保存されたテンプレートから前記測定物の移動量を算出する手段と、測定物が停止しているかを判定する手段と、を備え、前記保存されたテンプレートは、前記測定物が停止しているかを判定する手段により停止していると判定された場合に保存されたテンプレートを更新することを特徴とする。
(もっと読む)
距離画像カメラおよびこれを用いた対象物の面形状認識方法
【課題】様々な形状の箱などが混載されている場合であっても、それらを正確に分離して認識可能な距離画像カメラおよびこれを用いた対象物の面形状認識方法を提供する。
【解決手段】対象物へ向けて光を照射する発光部11と、反射光が戻ってくるまでの時間の測定値から算出される距離情報を画素毎に有する距離画像を取得する撮像部12と、取得した前記距離画像の各画素の前記距離情報が前記距離画像カメラからの距離を複数に分割した距離区間のいずれに対応するかを判定し、前記距離区間毎に前記距離情報が対応する画素数をそれぞれ集計した集計結果が最大であった前記距離区間いずれかを選択するとともに、そうして選択された前記距離区間のみに前記距離情報が対応する画素の2次元配置位置に基づいて前記対象物が前記距離画像カメラに対向している面の形状を認識する画像処理を行う演算制御部13とを備える。
(もっと読む)
画像合成のための3次元プロファイルマップの作成方法
【課題】光学顕微鏡を用いて、一つの立体的な試料に対して、焦点距離の異なる多数の画像を得、これらの画像を組み合わせて、全領域の焦点が合った1枚の2次元合成画像を得るため、試料の高さ情報を表示する3次元プロファイルマップの作成方法を提供する。
【解決手段】試料を異なる高さから撮像して、焦点部位の異なる2次元試料画像を得、離散ウェーブレット変換を行うことにより得られた詳細サブーバンドにおいて、最大の詳細サブーバンド係数値を示す画像の撮像高さで、初期の高さ地図を作成し、それぞれの入力画像において、焦点整合度を計算し、フィルターをかけて、非合焦点のピクセル(非境界点)の高さ情報は除去し、除去されたピクセル(非境界点)の高さを、フィルターを通過したピクセル(境界点)の高さ値から内挿して算出し、前記高さ情報の除去されたピクセルに対して前記内挿によって算出された高さを代入して高さ地図を作成する。
(もっと読む)
341 - 360 / 4,968
[ Back to top ]