
Fターム[2F065HH18]の内容
光学的手段による測長装置 (194,290) | 入射光 (9,091) | 入射方向 (4,392) | 入射方向可変 (160)
Fターム[2F065HH18]に分類される特許
1 - 20 / 160
3次元計測装置およびそれに用いられる照明装置
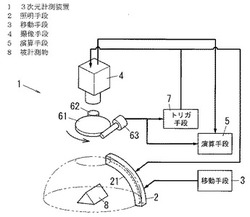
【課題】被計測物を精度よく計測することができる3次元計測装置およびそれに用いられる照明装置を提供する。
【解決手段】3次元計測装置1は、被計測物8に円偏光を照射する照明手段2と、照明手段2を移動させる移動手段3とを備える。また、3次元計測装置1は、被計測物8の被照射面からの反射光を受けて上記被照射面を撮像する撮像手段4と、撮像手段4で撮像された撮像画像を用いて反射光の偏光状態を検出し、被計測物8の被照射面の向きを求める演算手段5とをさらに備える。照明手段2は、円偏光を被計測物8の一部に照射する。移動手段3は、被計測物8において被照射面の位置が変わるように照明手段2を移動させる。
(もっと読む)
画像処理装置および画像処理プログラム

【課題】画像の領域の大きさを使用者の操作精度によらず容易かつ均一に得ることが可能な画像処理装置および画像処理プログラムを提供する。
【解決手段】画像データに基づく初期画像IMにおいて抽出される領域A4が表示部260の画像表示領域261に表示される。表示された領域A4に外接する外接矩形Pが作成される。作成された外接矩形Pが表示部260の画像表示領域261に表示されるとともに、作成された外接矩形Pの予め定められた部分の寸法または面積を示す特徴量が算出される。使用者は、入力装置を用いて表示部260の画像表示領域261に表示された外接図形Pを回転させることができる。
(もっと読む)
形状検査方法およびその装置
【課題】 複数の3次元形状計測法、表面計測手法を相補的に組み合わせることで、測定対象の形状によらず高い計測精度を確保した3次元形状検査方法およびその装置を提供することを目的とする。
【解決手段】 本発明は、検査対象の参照モデルの形状データである参照データを格納する格納部と、前記参照データから第1の形状データを取得する領域を特定する領域特定部と、前記領域特定部で特定した領域について前記第1の形状データを取得する第1の3次元形状センサと、前記領域特定部で特定した領域以外の領域について前記検査対象の前記第1の形状データとは異なる第2の形状データを取得する第2の3次元形状センサと、前記第1の形状データと前記第2の形状データとを統合する相補的統合部とを備えることを特徴とする3次元形状検査装置を提供する。
(もっと読む)
画像取得装置および画像取得方法
【課題】受光部のフォーカス調整を容易に行う。
【解決手段】画像取得装置は、ガラス基板9上における線状の撮像領域を撮像する撮像ユニット2と、ガラス基板9を撮像領域と交差する方向に移動する移動機構とを備える。撮像ユニット2は、光照射部21および受光部23を有し、光照射部21により撮像領域に光が照射され、撮像領域からの光が受光部23のラインセンサへと導かれる。画像取得装置では、受光部回動機構が受光部23を回転することにより受光部23の光軸J2とガラス基板9の法線Nとのなす検出角θ2が変更される。撮像ユニット2は、光軸J2に沿って受光部23を移動する受光部移動機構をさらに備え、検出角θ2の変位量に基づいて受光部移動機構を制御することにより、光軸J2上においてラインセンサの受光面と共役な位置Pがガラス基板9の表面に配置される。これにより、受光部23のフォーカス調整が容易に行われる。
(もっと読む)
観察装置および観察方法
【課題】透明性基板上に形成された不透明なデバイスパターンを観察像において明確に識別することができる観察方法、および観察装置を提供する。
【解決手段】デバイスパターン3が形成されている側に粘着シート4を貼り付けたうえで透明なステージ7に固定し、ステージ7の上方から同軸透過照明光L1と斜光透過照明光L2とを重畳的に照射するとともに、ステージ7の下方側からステージ7を介して裏面観察手段6で観察することで、観察像においては、デバイスパターン3に対応して、暗い(黒色の)デバイスパターン像が観察され、デバイスパターン像IP1以外の部分は明るく観察される。また、気泡5に対応する部分IB1についても十分に明るく観察される。これにより、観察像においてデバイスパターン3の形状を明確に特定することが可能となる。
(もっと読む)
パターン画像表示装置およびパターン画像表示方法
【課題】コントラストの高いパターン画像の表示を低コストにて実現する。
【解決手段】パターン画像表示装置の画像取得部13は、光照射部131、ラインセンサ132、角度変更機構、および、表示対象であるガラス基板9を移動する移動機構を備える。光照射部131からは、ガラス基板9の薄膜パターンに対して透過性を有する波長の光が出射される。光照射部131からの光の照射角θ1およびラインセンサ132により撮像が行われる検出角θ2は、常に同じであり、これらの角度は角度変更機構により変更される。パターン画像表示装置では、予め画像のコントラストが高くなる照射角および検出角の設定角度が求められ、照射角および検出角が設定角度とされる。これにより、単一波長の光源を用いてコントラストの高い画像をラインセンサ132により取得し、ディスプレイに表示することができ、パターン画像表示装置の製造コストも削減することができる。
(もっと読む)
マシンビジョン検査システムおよびその位置測定結果の決定方法
【課題】複数の視野に分割された対象を高精度に測定することができるマシンビジョン検査システムおよびその位置測定結果の決定方法を提供する。
【解決手段】マシンビジョン検査システムは、第1動作状態においてスケールベースの測定により第1対象FE1の位置を測定する。第2動作状態では、第1対象から第2対象に至る途中で重複画像CIA〜CICを撮影し、画像相関を利用して重複画像CIA〜CICの相互の画像変位を測定し、第1対象の位置と画像変位のセットとを合わせて第2対象FE2の位置を測定する。
(もっと読む)
パターンの描画条件導出方法及びパターン描画装置
【課題】パターンのムラ欠陥の生じない描画条件を導出し、製品の歩留まりを向上する。
【解決手段】基板上に描画するパターンのムラ欠陥が発生しない描画条件を導出する方法であって、基板上に形成するパターンを生成するパターン情報生成工程S1と、パターンに対して、複数の描画項目の組み合わせによる、2通り以上の描画条件を設定する描画条件設定工程S2と、前記生成されたパターンを抜き取り、補助基板上に、前記各描画条件のもとに、矩形領域をなす補助パターンを形成する補助パターン描画工程S3と、補助基板に対して照明光を入射し、補助パターンから生じる回折光を光電変換素子にて画像として取得し、ムラ欠陥に関するムラ評価値とムラ発生周期とを求めことにより、複数の描画条件の中からムラ欠陥が生じない描画条件を導出する描画条件判定工程S4とを含むパターンの描画条件導出方法である。
(もっと読む)
面法線計測装置、面法線計測システム及び面法線計測プログラム
【課題】物体表面の反射特性に鏡面反射成分を含むことを必要とせず、物体表面までの距離の計測も必要とせずに面法線を計測する。
【解決手段】面法線計測システム1は、ガイドレールRx,Ryに沿って、互いに直行する平面内を移動して物体OBJに対する照明方向を変化させる照明装置30と、物体OBJを撮影する撮影装置40と、撮影装置40によって撮影された画像に基づいて物体OBJの表面の面法線を計測する面法線計測装置10とを備える。面法線計測装置10は、物体OBJの画像を2値化し、画素ごとに、照明方向と明暗とが対応付けられた陰影ベクトルを作成し、予め形状が既知の参照物体について作成した参照陰影ベクトルと面法線とが対応付けられたデータベースを参照して、物体OBJの陰影ベクトルと最も類似する参照陰影ベクトルに対応付けられた面法線を、その画素における面法線と推定する。
(もっと読む)
投影制御装置及び投影制御方法
【課題】投影装置の動作をフレームごとに制御することを可能にする。
【解決手段】投影装置を制御するための投影制御装置は、複数の色成分で構成された映像信号を受信し、受信した映像信号の各フレームについて特定の色成分の情報を制御情報として抽出し、抽出された制御情報に基づいて投影装置の動作を制御するための投影制御情報をフレームごとに生成し、生成した投影制御情報を投影装置に供給する。
(もっと読む)
厚み検出装置および研削機
【課題】被加工物の厚みを正確に検出することができる非接触式の厚み検出装置および厚み検出装置を装備した研削機を提供する。
【解決手段】被加工物に対して透過性を有する所定の波長領域を有する発光体と、集光器とを備えた検出光照射手段と、検出光照射手段によって照射されチャックテーブルに保持された被加工物の上面および下面で反射した反射光を集光する集光レンズと、集光レンズによって集光された反射光の干渉を回折する回折格子と、回折格子によって回折した反射光の所定の波長域における光強度を検出するイメージセンサーと、イメージセンサーからの検出信号に基づいて分光干渉波形を求め、被加工物の上面で反射した反射光の光路長と被加工物の下面で反射した反射光の光路長との光路長差に基づいて被加工物の厚みを求める制御手段とを具備し、検出光照射手段は、P偏光を被加工物の上面に対して所定の入射角をもって照射する。
(もっと読む)
マクロ検査装置
【課題】被検査物の表面の凹凸パターンのサイズ変動を検査するマクロ検査装置を提供する。
【解決手段】被検査物2の表面の凹凸パターンのサイズ変動を検査するマクロ検査装置100である。マクロ検査装置100は、被検査物2を乗せるためのステージ1と、被検査物2の表面に対して所定の角度方向から被検査物2側に光を照射する拡散光源5と、被検査物2の表面からの反射光を受光可能なラインセンサ9と、被検査物2とラインセンサ9との間に設けられ、反射光のうち拡散光源5のエッジ部からの光束に起因する反射光束が、ラインセンサ9の両端の少なくとも一方に設けられた所定領域でのみ受光されるように、反射光をラインセンサ9に導くための光学系と、を備える。
(もっと読む)
面形状計測装置
【課題】被検面の形状を高精度に計測する。
【解決手段】被検面10の形状を計測する面形状計測装置であって、光源1からの光を参照光と被検光とに分割して被検光を被検面10に照射する計測ヘッド110と、計測ヘッド110を収納する収納部と、光源1からの光を計測ヘッド110へ入射させ、被検面10に対する被検光の入射角度を変える変更部120と、被検面10で反射され計測ヘッド110に戻ってくる被検光と参照光との干渉光を検出する検出部と、計測ヘッド110の位置を計測する位置計測部116−118と、検出結果および計測結果を用いて被検面10の形状を求める処理部9とを備え、変更部120は、光源1からの光を計測ヘッド110の収納部の外側から計測ヘッド110に入射させ、光源1からの光が計測ヘッド110に入射する位置を変えることによって入射角度を変える。
(もっと読む)
画像形成装置および画像形成方法ならびに部品実装装置
【課題】安定した3次元認識画像を形成して正しい部品認識結果を得ることができる画像形成装置および画像形成方法ならびに部品実装装置を提供する。
【解決手段】計測対象面への入射方向を挟んで対称に配置され受光面の計測対象面に対する傾斜角度が各対毎に相異なる2対の位置検出素子群25A,25Bを有し、走査光の計測対象面からの反射光の受光位置を検出する位置検出部25と、各位置検出素子が受光する光量が所定の範囲内にあるか否かを判定する受光量判定部34と、同一の位置検出素子群に属する位置検出素子による反射光の受光位置検出結果の差異の大きさが所定の基準値以下であるか否かを判定する受光位置検出結果判定部35とを備え、位置検出部25の受光位置検出結果に基づき受光量判定部34および受光位置検出結果判定部35の判定結果を加味して計測対象面の3次元認識画像を形成する構成とする。
(もっと読む)
基板の外観検査装置および外観検査方法
【課題】微小な電子部品であっても、その外形を示すエッジを正確に検出することができる基板の外観検査装置および外観検査方法を提供する。
【解決手段】照明パターン選択手段(照明パターン選択部47)は、複数の方向からの照明光を同時に照射する照明パターン1と、照明パターン1よりも高い輝度で複数の方向からの照明光を別々に照射する照明パターン2と、から照明光照射手段(照明20)による照明光の照射パターンを選択し、画像取得手段(カメラ10)は、照明パターン2が選択された場合には、別々に照射された複数の方向別の照明光毎に画像を取得する。このようにして取得した画像には、電子部品の実装面に略平行な面(上面)および実装面に略垂直な面(側面)により形成されるエッジが、電子部品の側面からの拡散光によって電子部品の外形として表され、エッジ検出手段(エッジ検出部48)はこれらの画像から電子部品の外形を示すエッジを検出する。
(もっと読む)
3次元形状計測装置およびロボットシステム
【課題】3次元形状の計測処理を高速化すること。
【解決手段】スリット状の光線を計測対象物に対する照射位置を変更させながら照射する照射部と、前記光線が照射された前記計測対象物を順次撮像する撮像部と、前記撮像部によって撮像された画像を走査することによって前記画像における前記光線の位置を検出する位置検出部と、前記位置検出部による走査対象の画像よりも以前に前記撮像部によって撮像された画像における前記光線の位置に基づいて前記走査対象の画像における走査領域を決定する走査領域決定部とを3次元形状計測装置へ設ける。
(もっと読む)
トロリ線測定方法及び装置
【課題】トロリ線以外の構造物の影響を無くしトロリ線の偏位量を正確に測定する。
【解決手段】トロリ線測定装置は、トロリ線に向けて光を投光し、その反射光を受光することによってトロリ線の外形を測定する。このトロリ線の外形を測定する際に、剛体電車線区間では剛体部やイヤー部からのノイズが多く正確に測定することが困難である。そこで、このトロリ線測定装置は、剛体電車線区間でトロリ線及びその近傍の電車線設備(剛体部及びイヤー部)の画像を撮影し、撮影された画像に基づいて電車線設備の偏位を測定し、その測定結果をトロリ線の外形の測定に反映させるようにした。
(もっと読む)
膜厚むら検査装置及び方法
【課題】検査に適切な明るさやコントラストの画像を取得し、膜厚むら検査装置及び方法を提供する。
【解決手段】表面に皮膜が形成された基板を一方向に移動させながら、基板に形成された皮膜の膜厚むらを検査する装置及び方法であって、皮膜の厚みを検出する膜厚検出部を備え、光源部は、撮像部側に配置された反射照明部3aと、基板を挟んで撮像部に対向する位置に配置された透過照明部3bを備え、撮像部4は基板との相対角度を調節する撮像部角度調整手段を備え、反射照明部は反射照明部と基板との相対角度を調節する反射照明角度調整手段を備え、透過照明部は透過照明部と基板との相対角度を調節する透過照明角度調整手段を備え、膜厚検出部からの膜厚情報に基づき、反射照明角度調節手段及び透過照明角度調整手段を制御し、反射照明の光量及び透過照明の光量を調節する制御部を備えたことを特徴とする膜厚むら検査装置及び方法。
(もっと読む)
形状計測装置及び形状計測方法
【課題】グイ位相に伴って生じる計測誤差を低減する。
【解決手段】計測装置100は、光源から射出された光を参照光と被検光とに分割する分割部110と、前記参照光を反射する参照面111と、前記被検光を被検面113に集光する集光部112と、前記被検面でキャッツアイ反射された被検光と前記参照面で反射された参照光との干渉光を検出する第1検出器114とを含む計測ヘッド101と、前記計測ヘッドを前記被検面に沿って駆動する駆動部140と、前記計測ヘッドの位置を検出する第2検出器150と、前記被検光の前記被検面における回折によって生じるグイ位相を取得し、前記第1検出器により検出された干渉光の情報から前記被検光と前記参照光との間の位相差を算出し、前記第2検出器により検出された前記計測ヘッドの位置と前記取得されたグイ位相と前記算出された位相差とから前記被検面の形状を算出する処理部115と、を備える。
(もっと読む)
検査装置および方法、リソグラフィ装置、リソグラフィ処理セル、およびデバイス製造方法
【課題】オーバーレイ測定、非対称性測定、およびインダイオーバーレイターゲットの再構築を可能にする。
【解決手段】四分くさび光デバイス(QW)は、基板から散乱した放射の回折次数を別々に再誘導し、第1方向および第2方向の各々に沿って照明から回折次数を分離する。例えば、0次(0、0’)および1次(−1、+1’)を、各入射方向について分離する。マルチモードファイバ(MF)での捕捉の後、スペクトロメータ(S1−S4)を使用して波長(I0’(λ)、I0(λ)、I+1’(λ)、およびI−1(λ))の関数としての空間的に再誘導された回折次数の強度を測定する。そして、これをオーバーレイエラーの計算、または単一格子の非対称パラメータの再構築に用いる。
(もっと読む)
1 - 20 / 160
[ Back to top ]