
Fターム[2F065JJ07]の内容
光学的手段による測長装置 (194,290) | 受光部 (23,546) | 配置;方向 (2,894)
Fターム[2F065JJ07]の下位に属するFターム
Fターム[2F065JJ07]に分類される特許
161 - 180 / 416
測定装置及びそれを用いた機器

【課題】測定対象物と受光素子との離間距離に依存せずに、反射光学像を用いて高精度に測定対象物の測定装置との相対変位等を測定する。
【解決手段】測定装置は、可干渉性を有する発散光束を射出する光源10と、光源から測定対象物20に照射された光束により発生した反射光学像を受光する受光素子31とを有する。測定装置は、光源の発光面と受光素子の受光面は同じ平面C上に配設され、光源から射出された発散光束を光学パワーを持った面を介さずに測定対象物に照射する。測定装置は、tan(θ/2)>D/(2・L)を満足する。θは光源の配光角度範囲、Dは光源の発光領域の中心と受光素子の受光領域の中心との間の距離、Lは光源の発光面から測定対象物までの距離である。
(もっと読む)
三次元形状測定方法および装置

【課題】三次元形状測定方法および装置において、例えば、ハレーション等の被測定物の表面の反射特性による反射光のノイズ成分を低減し、被測定物の表面の測定不能域を低減することができるようにする。
【解決手段】三次元形状測定装置100は、被測定物1にパターン光12bを投影するプロジェクタ2と、パターン光12bが投影された被測定物1を撮像して、被測定物1の表面からの反射光画像を取得するCCDカメラ3と、反射光画像から被測定物1の三次元形状を算出する演算部4と、被測定物1とCCDカメラ3との間に配置された偏光フィルタ9と、プロジェクタ2と被測定物1との間に配置された偏光フィルタ7とを備え、偏光フィルタ7、9は、透過軸の方向を調整可能に設けられている。
(もっと読む)
街路環境内の3Dモデルを評価するための方法及び装置
【課題】 立体センサ技術を使用して街路環境内の3D−モデルを評価するための方法を提供する。
【解決手段】 この方法では、含まれたセンサは対で配置されている。本発明はまた、立体センサ技術を使用して街路環境内の3D−モデルを評価するための装置に関し、それはブラケット(33)上に取り付けられた少なくとも一対のセンサ(16,17,18)を含み、センサの各対は共通面内に位置されている。本発明は、困難なコントラスト条件下の立体効果を測定する問題を解決する。また、本発明によれば、含まれた各対のセンサが、画像面内のコントラストの低レベルが避けられるようにコントラスト情報に基づいて位置される方法が提案される。含まれた対のセンサ(16,17,18)が、センサ対(16,17,18)のセンサ(16a,16b,17a,17b,18a,18b)が互いから離れて水平に位置され、センサの一方がブラケット(33)の水平面の上に、他方が水平面(22)の下に位置されるようにブラケット(33)の本質的に水平な面(22)に対して相互に位置されることを含む装置が提案される。
(もっと読む)
周辺監視装置
【課題】車両に搭載されて周囲の対象物体との衝突可能性を判定する周辺監視装置において、処理の高速化(フレームレートの向上)を実現する。
【解決手段】ステレオカメラ11,12で得られた時系列画像から時系列情報算出部21で対応点探索処理によって2次元オプティカルフローを算出すると、先ず対象物体候補領域抽出部22が対象物体が存在する可能性の高い候補領域を抽出する。その後、3次元情報取得部23が、ステレオカメラ11,12の画像から前記対象物体の候補領域の3次元情報を取得し、得られた3次元情報と、該周辺監視装置1との位置関係から、衝突判定部24が衝突可能性を判定する。したがって、複雑な物体認識処理や道路モデルなどを必要とせず、時系列画像から算出された2次元オプティカルフローのみを用いて対象物体の候補領域を限定し、3次元での衝突判定を行うことで、処理速度を速くできる。
(もっと読む)
自己位置推定装置及び自己位置推定方法
【課題】周囲物体を特定する特徴点がロストする可能性を低減し、自己位置推定を継続的に実施可能な自己位置推定の技術の提供する。
【解決手段】移動体1に搭載した撮像装置10により撮像する画像中の特徴点を検出しつつ、移動体1の移動に伴う画像上での上記特徴点の変化から移動体周囲の物体の位置を検出することで、自己位置を推定する。このとき、上記移動体1の動作がその場回転する場合には、移動体がその場回転する前に取得した画像中に位置する特徴点の少なくとも一部を撮像可能な向きに、上記撮像方向を保持する。
(もっと読む)
シリンダライナ検査装置およびシリンダライナ検査方法
【課題】ピストン往復動燃焼エンジンのシリンダのシリンダカバーを取り外すことなく、シリンダの内径および表面状態を検査するようにして、当該シリンダライナの検査の時間を短縮する。
【解決手段】燃焼機関のシリンダライナ25の摺動面35を検査する方法および検査装置が提供され、検査装置は、検査工具、制御装置、電力供給と測定データおよび制御信号の伝達のための接続手段60を有する。検査工具は、ベアリングレール70を有し、このベアリングレール70には、ロータリテーブル80、シリンダライナ25の内径と摺動面35とを測定するためと、表面状態を目視検査するための工具90,96とが装架される。検査工具は、被検査シリンダライナ25の開口を通してシリンダライナ25に導入しうるサイズとする。本発明は、特にピストン往復動燃焼機関のシリンダライナ25の検査に適している。
(もっと読む)
2次元及び3次元位置検出システム、及びそのセンサ
2次元及び3次元の位置検出システム、ならびにそのシステムで使用されるセンサが開示される。センサは、線形アレイセンサ、及び、光又は他の放射線がセンサの大部分の素子に到達するのを遮るための開口プレートを内包する。相対的な放射線源の方向が、各センサの内の放射されたセンサ素子に基づいて、決定される。センサは、放射線源の位置を推定可能とするために、システム内に組み合わされる。 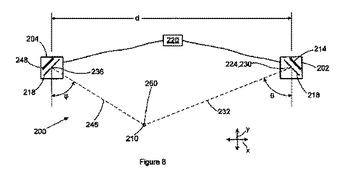 (もっと読む)
(もっと読む)
画像処理方法及び画像処理装置
【課題】テンプレートマッチングの位置検出精度向上
【解決手段】テンプレート画像データと被探索画像データとにより相関分布を求め、当該相関分布の特性から被探索パターンの位置検索を行う画像処理方法において、テンプレート画像に対して基準画像を所定の移動距離単位で相対的に直進移動させて理想的な標準相関分布を求め、被探索画像の相関分布と標準相関分布の各々について尖度を求め、標準相関分布の尖度と被探索画像の相関分布の尖度とを比較すると共に、当該各尖度の比較結果に応じて、被探索画像の最大相関値となる最大相関位置を前記画像移動方向における画像一致位置とするか、相関分布の頂上部の加重平均位置を画像一致位置とするかを判定する。
(もっと読む)
非球面体測定方法および装置
【課題】測定対象となる非球面体が鍔状の平面部を有していない場合でも、面ずれおよび面倒れを高精度に測定できるようにする。
【解決手段】第1干渉計1Aと第2干渉計1Bとを用いた光干渉計測により、非球面レンズ9の第1レンズ面91および第2レンズ面92の各中心部の形状データを求め、各々の形状データから、第1レンズ面91の第1臍点P1、第1曲率中心および第1軸線の各位置データを第1測定座標系において求めるとともに、第2レンズ面92の第2臍点P2、第2曲率中心および第2軸線の各位置データを第2測定座標系において求める。これらの各位置データと、第1測定座標系および第2測定座標系の相対位置関係とに基づき、非球面レンズ9の面ずれおよび面倒れを求める。
(もっと読む)
温度画像の三次元化装置
【課題】コンピュータ上で深さ方向の温度分布を対象物体を回転しながら確認することができる温度画像の三次元化装置を提供する。
【解決手段】既知の座標を有する複数の豆電球22を基準点とする基準物21と、対象物1及び基準物21からの発熱に基づいて対象物1の三次元情報を取得する三次元情報取得手段27と、実座標と温度画像座標とのキャリブレーションを行なう座標キャリブレーション手段31と、実座標から温度画像情報の温度画像座標への変換式を決定する変換式決定手段32と、決定された変換式に基づいて対象物1の三次元情報に係る全ての実座標を温度画像座標に変換する座標変換手段33と、変換された三次元情報の温度画像座標に基づいて三次元情報の温度情報を抽出する温度情報抽出手段34と、温度画像情報中の特定の温度画像座標と三次元情報中の特定の実座標とを対応付ける座標対応付手段35と、を備えて構成されている。
(もっと読む)
位置計測システム及び位置計測方法
【課題】対象物のステレオ視によって対象物の位置を計測するに際し、量子化誤差を軽減することができる位置計測システム及び位置計測方法を提供する。
【解決手段】位置計測システム1では、対象物Tのステレオ視において2台のカメラの視線領域が重なる重複領域に対象物Tの真値(真の座標)が存在することに鑑み、カメラ21〜24の位置関係が第1の位置関係である場合の第1の重複領域DR1、当該位置関係が第2の位置関係である場合の第2の重複領域DR2、及び当該位置関係が第3の位置関係である場合の第3の重複領域DR3を取得し、重複領域DR1〜DR3が重なる領域にて対象物Tの位置を算出する。これにより、重複領域のそれぞれから、重複領域が重なる領域へと、対象物Tの真値が存在する領域が狭められる。
(もっと読む)
表面特性を用いて対象物の特定および/または認証をするための方法、および、その方法に使用するセンサ
本発明の主題は、表面特性を用いて、対象物の特定および/または認証をするための方法である。本発明のさらなる主題は、表面を走査するためのセンサである。 (もっと読む)
レーザ計測装置を用いて被計測物を複数方向から同時計測するシステム
【課題】大量の遺物を複数方向から同時計測し、欠損の少ない遺物単位の三次元表面モデルを取得する、レーザ計測装置を用いて被計測物を複数方向から同時計測するシステムを提供する。
【解決手段】ガラステーブル11上に載置した複数の被計測物R1〜R4及び計測用マーカ16に対し、上下方向からレーザを照射し上記複数の被計測物及び計測用マーカの三次元座標の計測データを取得する複数のレーザ計測装置12〜14と、モデリング生成部15とからなる。モデリング生成部15は、計測用マーカ16に関する特徴線について位置合わせを行い、幾何変換行列を獲得した後で、各レーザ計測装置12〜14から得られた単位点群を幾何変換して統合データを取得し、ラベリング技術を用いて被計測物毎の統合データに分離してメモリに記憶する。
(もっと読む)
球状体の直径不同の測定方法、選別方法および選別装置
【課題】 高速生産される球状体の直径不同を、生産速度に合わせて迅速、正確かつ安価に測定する方法と、その測定方法を用いた球状体の選別方法及び選別装置を提供する。
【解決手段】 揺動している球状体11の外形画像を、垂直方向と水平方向から複数回撮影する。(ア)垂直方向から撮影した画像について、各画像における直径の最大値(最大径)を求め、全画像を通して最大径の最大値(直径最大値)を求め、最大直径dmaxとする。(イ)水平方向から撮影した画像について、各画像における直径の最小値(最小径)を求め、全画像を通して最小径の最小値(直径最小値)を求め、最小直径dminとする。(ウ)最大直径dmaxと最小直径dminとの差、Δd=dmax−dminを直径不同とする。
(もっと読む)
マルチイメージフェーズシフト解析を用いた検査システム及び方法
【課題】エッジ破断部を検査するための、新規の改善された検査システム及び方法を提供すること。
【解決手段】検査システム(10)が、光源(20)と、回折格子(23)と、位相シフトユニットと、イメージャ(30)と、プロセッサ(11)とを備える。光源(20)は、光を発生するように構成される。回折格子(23)は、発生した光の経路内にあり、光が通過した後に回折格子像を生成するように構成される。位相シフトユニットは、回折格子像の複数の位相シフトパターンを形成し、それを物体表面(16)上に反射して、複数の投影位相シフトパターンを形成するように構成される。イメージャ(30)は、投影位相シフトパターンの像データを取得するように構成される。プロセッサ(11)は、像データから物体表面を再現するように構成される。検査方法についても開示する。
(もっと読む)
カメラ運動・物体形状復元方法、カメラ運動・物体形状復元装置、カメラ運動・物体形状復元プログラム及びこのプログラムを記録した記録媒体
【課題】特徴点追跡結果に雑音が含まれる場合においても雑音に影響されずにカメラの運動および撮影対象物体の三次元形状を復元する。
【解決手段】カメラ運動・物体形状復元装置1において、計測行列生成部103はカメラ100の動きに伴って変化する時系列画像の全フレームにわたり抽出された特徴点に基づき前記特徴点の時間的変動量から成る計測行列を生成する。復元反復部110は前記計測行列から雑音成分を除去しこの雑音成分を除去した行列に基づきカメラ100の運動を示す運動行列と撮影対象物体の三次元形状を示す形状行列とを算出する演算を行い、前記雑音成分が前記演算の停止条件を満たしていない場合、前記算出した運動行列及び形状行列に基づき前記計測行列を更新し、この更新した計測行列を前記演算にする処理を、前記停止条件が満たすまで反復実行する。
(もっと読む)
タイヤの検査装置
【課題】タイヤの例えば内面や外面の外観検査において、効率よくタイヤを撮像することにより検査にかかる処理時間を短縮し、かつ、撮像された画像を精度よく合成することができるタイヤの検査装置を提供する。
【解決手段】周方向に相対的に位置ずれして配置され、かつ互いにタイヤの幅方向に撮像位置がそれぞれ異なるように設定された複数のカメラ11〜13により撮像して得られるタイヤの内周面の各撮像画像を合成して検査するタイヤの検査装置において、タイヤが複数のカメラ11〜13と相対的に周方向に回転されて、撮像動作が全カメラ11〜13で行われるときに、全カメラ11〜13の撮像画像中に同一時刻でマーカを入れて、全カメラ11〜13が撮像した撮像画像を合成するときに、このマーカを各撮像画像の基準位置として用いて、カメラ11〜13間の周方向の相対的位置ずれ量に見合うように撮像画像を位置合わせして合成するようにした。
(もっと読む)
全方位3次元空間認識入力装置
【課題】ステレオ画像及び距離・形状など3次元情報を取得する3次元空間認識入力装置において、常時、全方位で高解像度且つ死角の無い入力を取得可能な3次元空間認識入力装置を提供する。
【解決手段】ミラー部3,4とカメラ部3c,4cで構成する光学系により全方位画像を撮像する2つ以上の撮像手段を用いて、撮影空間に於けるステレオ画像及び被写体の形状及び構造を表わす3次元座標値を抽出する3次元空間認識入力装置であって、2つ以上の全方位撮像手段に於いて高解像度領域で視野が光学的に重なり、且つ相互の写り込みによる死角を解消するように配置する事により、常時高画質なステレオ視及び高精度3次元位置座標を計測する手段を備える。
(もっと読む)
形状検査装置,形状検査方法
【課題】ディスク部材について,表裏各面と端面を形成するチャンファ部との境界部分において突起した形状欠陥を検出することができること。
【解決手段】1つの平面内の複数の位置各々に配置された複数のLED12からディスク基板1の測定部位Pに対し,順次異なる照射角度で光を照射し,その照射ごとに,計算機30により,測定部位Pからの反射光の像のカメラ20R,20Lで撮像し,さらに,計算機30により,各LED12に対応した撮像画像と光の照射角度φとに基づいて,測定部位Pの表面角度の分布を算出し,表面角度の変化が許容範囲内か否かの判別により表面形状の良否を判別し,表面形状の画像を,形状不良部分を明示しつつ画像表示装置に表示させる。
(もっと読む)
車両検出装置
【課題】本発明は、画像から車両の情報を高精度に検出する車両検出装置を提供することを課題とする。
【解決手段】撮像手段5で撮像した画像から車両の情報を検出する車両検出装置1であって、撮像手段5で車両を撮像した画像から複数のエッジを抽出するエッジ抽出手段12と、エッジ抽出手段12で抽出した各エッジについて画像上の位置に対するエッジ方向で分布したエッジ分布を生成するエッジ分布生成手段13と、エッジ分布生成手段13で生成したエッジ分布に基づいて車両の情報を検出する車両情報検出手段13とを備えることを特徴とし、エッジ分布においてエッジ方向の分布状態が変化する画像上の位置を車両の端部として検出すると好適である。
(もっと読む)
161 - 180 / 416
[ Back to top ]