
Fターム[2F065JJ26]の内容
光学的手段による測長装置 (194,290) | 受光部 (23,546) | 1つの受光部の素子数 (9,727) | 多数 (6,943) | 2次元状 (5,630)
Fターム[2F065JJ26]に分類される特許
2,121 - 2,140 / 5,630
イメージングシステム及び方法
物体の表面法線の勾配を決定する装置であって、方法は、各画像が異なる方向からの照明のもとで取得された、前記物体の3つの2D画像のデータを受信する手段と、画素からの2つの画像から得られるデータのみがあるように、前記画像のどの画素が陰になっているかを定める手段と、前記2つの画像に関して利用可能な前記データを使用して、陰影画素の表面法線の勾配に関する可能な解の範囲を決定する手段と、前記物体の領域上の勾配場の積分可能性を拘束として使用して、コスト関数を最小化することにより、前記勾配に関する解を選定する手段と、を具備する。
【選定図】図1 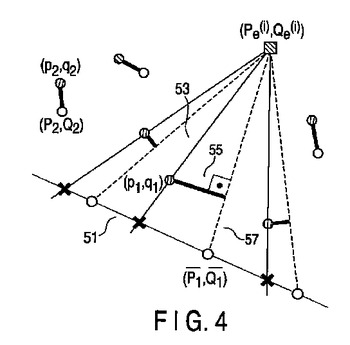 (もっと読む)
(もっと読む)
プリプレグ欠点検査方法
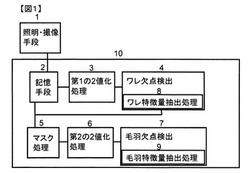
【課題】炭素繊維にマトリックス樹脂を含浸させたプリプレグ表面の欠点検査方法。特に、一方向に引き揃えたプリプレグ表面に対して、高精度で信頼性高く検査できる光学的手段を用いた欠点検査方法を提供する。
【解決手段】欠点候補領域の矩形率、最大径角度、凹凸度を求め、ワレ欠点を検出後、ワレ欠点検出領域をマスクした画像から、1画素列毎に閾値を算出し、その閾値により2値化して毛羽欠点を検出する。
(もっと読む)
車載カメラの校正装置

【課題】複数の色の組み合わせパターンからなる校正指標を環境光の影響下で撮影して得られた撮影画像データから、効率的に且つ正確に校正点の検出と位置算定を行うことが可能な車載カメラの校正装置を提供する。
【解決手段】格子模様の境界線の交差点を校正点Qとする少なくとも2つの校正指標を含む撮影画像上において、第1校正点Q1が含まれる第1領域R1を設定し、第1領域R1において第1境界線V1、第1交差境界線H1を検出し、第1境界線V1及び第1交差境界線H1に基づいて第1校正点Q1を検出し、第1校正点Q1に基づいて第2校正点Q2が含まれる第2領域R2を設定し、第2領域R2において第2境界線V1、第2交差境界線H2を検出し、第2境界線V1及び第2交差境界線H2に基づいて第2校正点Q2を検出し、第1校正点Q1及び第2校正点Q2に基づいて車載カメラを校正する。
(もっと読む)
光波干渉測定装置
【課題】凹面部と凸面部を有してなる被検面の形状を光干渉計測できるようにする。
【解決手段】被検面80の凹面部81を測定する場合には、測定光が一旦収束した後に発散しながら凹面部81に照射されるように、凸面部82を測定する場合には、測定光が収束しながら凸面部82に照射されるように、干渉光学系2に対する被検面80の測定光軸L方向の位置をサンプルステージ6を用いて変更する。また、被検面80に測定光が照射されたときに被検面80の一部領域から反射されて撮像系4に入射する不要光の発生を防止するために、所定の干渉縞パターンを被検面80に投影する干渉縞形成光学系70を、光源部20と分岐光学素子3との間の光路上に配置する。
(もっと読む)
撮像装置および三次元位置検出装置
【課題】三次元位置測定の測定精度を向上させる。
【解決手段】対物レンズ22によりサンプル12が拡大され、撮像部15によりサンプル12が撮像される。また、偏向部材33は、対物レンズ22の瞳の位置近傍に配置され、対物レンズ22を介してサンプル12からの光の一部を偏向して撮像素子41の撮像面S2に向かわせる。そして、調整機構35は、偏向部材33の位置を、少なくとも対物レンズ22の光軸方向に調整する。また、撮像部15により撮像された画像が解析され、偏向部材33を介さずに撮像面S2に到達した観測光によるサンプル12の像と、偏向部材33により偏向されて撮像面S2に到達した観測光によるサンプル12の像との位置関係から、サンプル12の三次元的な位置が検出される。本発明は、例えば、一分子生理学あるいは生物物理学で用いられる三次元位置検出装置に適用できる。
(もっと読む)
バックライトビジョンマシン
バックライトビジョンマシン装置(30;100)が記述される。これは、対象物を撮像するイメージセンサ(34;134)を含む(46;102)。第1の特性を有する放射を生成するための放射源(36、62;136)、および、第1の特性(38;138)を有する放射を第2の特性(48;148)を有する放射に変換するための放射コンバーター(44;144)も備える。放射源(36、62;136)は、第1の特性(38;138)を有する放射を、放射コンバーター(44;144)に投射するように配置され、それにより、第2の特性(48;148)を有する放射を生成する。一方、放射コンバーター(44;144)は、イメージセンサ(34;134)により撮像される対象物(46;102)を照明するように配置される。対象物(46;102)は、放射コンバーター(44;144)とイメージセンサ(34;134)の間に設置可能で、このような対象物は、放射コンバーターにより生成された第2の特性(48;148)を有する放射によりバックライトされる。放射源(36、62;136)は、撮像される対象物(46;102)と放射コンバーター(44;144)に第1の特性(38;138)を有する放射を投射するように配置される。  (もっと読む)
(もっと読む)
円筒体の表面検査装置
【課題】円筒体における凸状欠陥の検査を簡単かつ正確に行える円筒体の表面検査装置を提供する。
【解決手段】本発明は、円筒体Wを軸心回りに回転させつつ、表面状態を検査するようにした円筒体の表面検査装置を対象とする。本装置は、円筒体Wの周面端部に転がり接触し、かつ円筒体の位置を規定する基準ローラ51と、円筒体Wの周面端部に凸状欠陥W5が形成されている場合に、その凸状欠陥W5に基準ローラ51が接触して、円筒体Wが乗り上がることにより、円筒体が径方向に変位する際の変位量を検出する変位量検出手段と、変位量検出手段からの情報に基づいて、円筒体における凸状欠陥の有無を検出する凸状欠陥検出手段と、を備える。
(もっと読む)
画像投影・撮像装置
【課題】画像投影装置を撮像装置とを一体化した小型画像投影・撮像装置を実現する。
【解決手段】画像投影・撮像装置1Aは、走査型投影部10、測長部30および撮像部40により構成される。走査型投影部10は、光源11R、11G、11Bから出射された3色の半導体レーザを二次元的に走査して投影光を形成する。測長部30は、この投影光を利用し、対象物までの距離および対象物の寸法を測定する。撮像部40は、この測定結果に基づいて焦点を自動調整し、対象物を撮影する。
(もっと読む)
3次元形状計測装置および方法並びにプログラム
【課題】被写体にパターン光を照射することにより取得した画像を用いて、被写体の3次元形状を正確に計測する。
【解決手段】プロジェクタ4から所定方向に偏光されたパターン光を出射して被写体に照射する。被写体におけるパターン光の反射光は、フィルタ部14,15により所定方向に直交する方向に偏光されて、第1および第2のカメラ2,3に入射する。これにより、第1および第2のカメラ2,3が基準画像および参照画像を取得し、演算部5が画素の対応付けを行うことにより、被写体の3次元形状を計測する。
(もっと読む)
筆跡表示システム
【課題】 筆跡を表示する対象物の高さによらず、指示具でその対象物に筆跡を表示することができる筆跡表示システムを提供する。
【解決手段】 本筆跡表示システムは、互いの位置関係が既知の4つ以上の光源a1,a2,a3,a4をもつ光源セットおよびペン先が物体6上にあることを伝達するための光源bを設置した筆跡表示ペン2と、光源を撮像するカメラ30と、撮像した画像から求めた筆跡表示ペン2の位置と角度および筆跡表示ペン2のペン先が物体6上にあるときの高さに基づいて筆跡表示ペン2の筆跡表示位置を演算する演算装置4と、演算した筆跡表示位置を筆跡表示ペン2の筆跡として物体6に表示する表示装置5とを備える。
(もっと読む)
車両用ミラー角調整装置
【課題】車両周辺の所定領域内に存在する対象物を運転者が視認するべく該車両に搭載された視認ミラーのミラー角を調整するための車両用ミラー角調整装置1において、対象物の自車両に対する相対位置変化に拘わらず、各ミラーにより対象物を確実に視認可能にする。
【解決手段】車両の室内カメラ6の撮像画像を基に、運転者の目の3次元位置を検出する目位置算出部20と、側方監視カメラ7,8及び後方監視カメラ9の撮像画像を基に、車両周辺の対象物の3次元位置を算出する対象物位置算出部21,22と、対象物位置算出部21,22にて算出された対象物の位置情報と目位置算出部20にて算出された運転者の目位置情報とを基に、ドアミラー及びルームミラーの目標ミラー角をそれぞれ算出する目標ミラー角算出部23,24とを備える。
(もっと読む)
位置姿勢計測装置及び方法
【課題】観察対象物体の3次元モデルデータから抽出した特徴のうち、位置姿勢の算出に用いる特徴を適切に選別することにより、位置姿勢検出処理の安定化、効率化を図る
【解決手段】位置姿勢算出装置は、観察対象物体の表面形状を表す3次元モデルデータを描画することにより前記観察対象物体の幾何的情報に基づく複数の幾何特徴を抽出する。そして、観察対象物体に対する撮像装置の位置姿勢が算出済みとなっている参照画像において複数の幾何特徴に対応する画像特徴を探索し、対応する画像特徴が検出された幾何特徴を、抽出された複数の幾何特徴より選別する。位置姿勢算出装置は、こうして選別された幾何特徴を入力画像における観察対象物体の画像に対応付けることにより、撮像装置の観察対象物体に対する位置姿勢を算出する。
(もっと読む)
パッケージ上の糸条幅測定方法
【課題】無撚りの糸条が綾角をなして巻回されたパッケージ上の糸条幅を、パッケージ上にて、自動かつ高精度に検出することができ、また糸条幅測定作業の時間短縮ならびに作業工数の削減を図ることができる糸条幅測定方法を提供する。
【解決手段】無撚りの糸条が綾角をなして巻回されたパッケージ3を照明し、最外層の糸条5と最外層の糸条5の下に巻回されかつ表面に露出している糸条6から反射光を受光してパッケージ3の画像を撮像するとともに、得られた画像において高光量部を特定し、該高光量部の幅を測定することで前記糸条と糸条の少なくとも一方の糸条幅を算出する。
(もっと読む)
画像生成装置、及びプログラム
【課題】被写体が3次元表示に適さないものであっても、視認性の高い3次元画像を取得すること。
【解決手段】被写体の特徴点情報とその距離情報とを対応付けた点群情報に含まれる距離情報のうち、特定の距離情報よりも大きい距離範囲に属する距離情報が小さくなるように補正する。そして、このようにして補正された点群情報を用いて3次元画像を生成する。このようにすれば、主要被写体と背景被写体との距離が大きい場合であっても、点群情報における主要被写体と背景被写体との距離情報が小さくなる。これにより、補正された点群情報を用いて生成される3次元画像においては、3次元画像を構成する三角形ポリゴンがいびつな形状となることを回避できる。その結果、視認性の高い3次元画像を得ることができる。
(もっと読む)
マーカ自動登録方法及びシステム
【課題】近両用マーカの3次元位置と方向の計測と計測結果の記憶の手間を省くと共に計測ミスの発生を低減する。
【解決手段】作業環境の基準となる位置(世界座標系の原点や座標軸上の点)及び適宜な位置に遠近両用マーカ1を貼り付け、作業環境に貼り付けた遠近両用マーカ1を見渡せる位置にビデオカメラ2とレーザ距離計測器3を備えたマーカ自動登録システムを設置して作業環境に貼り付けられた総ての遠近両用マーカ1の3次元位置と方向を計測し、これを世界座標系Wで表された3次元位置と方向に変換して記憶する。
(もっと読む)
指示器システム
【課題】 指示器を操作する人の手ブレに起因する画面上の指示点のブレを軽減することができる指示器システムを提供する。
【解決手段】 この指示器システムは、互いの位置関係が既知の4つ以上の光源をもつ光源セットを有する指示器2と、指示器2が指し示す方向を横切って仮想的に設定される指示器2の操作範囲7と、光源を撮像するカメラ30と、撮像した画像から求めた指示器2の位置と角度に基づいて指示器2が操作範囲7内で指し示す第1の指示点位置8を算出し、第1の指示点位置8に基づいて表示装置で表示するための第2の指示点位置9を演算する演算装置4と、第2の指示点位置9を指示点1として画面50に表示する表示装置5とを備える。
(もっと読む)
位置測定方法及び位置測定装置
【課題】チョクラルスキー炉における原料融液の液面位置(メルトレベル)の位置測定方法及び位置測定装置を提供する。
【解決手段】測定箇所7aで反射した反射光を、集光レンズ13aで集光して二次元光センサ13bで受光し、受光された反射光の輝度に基づいて三角測量の原理を利用して測定箇所7aの位置を測定する方法であって、二次元光センサ13bにおいて反射光が測定箇所7aの位置を表す方向を第1方向D1といい、第1方向D1と直交する方向を第2方向D2という場合に、第2方向D2に沿う反射光の輝度を示す第2波形についてその重心である第2方向重心を算出する第2方向重心算出工程と、第2方向重心に基づいて第1方向D1に沿う反射光の輝度を示す第1波形についてその中心である第1方向中心位置を算出する第1方向中心位置算出工程と、第1方向中心位置に基づいて測定箇所の位置を算出する測定箇所算出工程と、を備える。
(もっと読む)
位置姿勢推定用モデル生成装置、位置姿勢算出装置、画像処理装置及びそれらの方法
【課題】面の隠れや曲面を含んだ物体に対応できるような面情報を含んだ位置姿勢推定用モデルを生成する。
【解決手段】撮像装置の観察対象物体に対する相対的な位置及び姿勢を推定するために、位置姿勢推定用3次元モデルを生成する装置であって、観察対象物体の形状を表す3次元情報を利用して、所定の点から観察対象物体までの相対的な距離が画素ごとに格納された奥行き画像を取得する奥行き画像取得手段と、前記奥行き画像取得手段により取得した奥行き画像から、観察対象物体の形状を表す3次元点群データを生成する点群生成手段と、前記3次元点群データから、位置姿勢推定用3次元モデルを生成するモデル生成手段とを有する位置姿勢推定用3次元モデル生成装置。
(もっと読む)
移動ウェブのパターンの変位を測定する装置
【課題】移動ウェブに関する速度、変位、歪みを効率的に測定する。
【解決手段】移動するウェブ部材14の近くに第1、第2の光センサ配列16、18を設置する。第1、第2の光センサ配列16,18はウェブ部材14の走行方向に沿って所定距離dだけ離れている。第1、第2の光センサ配列16、18の双方に結合されている処理装置40は、第1、第2、第3のコード区画それぞれにより制御され、それぞれ、第1の光センサ配列16でウェブ部材14上のパターンを検出させ、第2の光センサ配列18でウェブ部材14上で前記検出されたパターンを認識させ、そして、ウェブ部材14の速度、距離d、および第1のコード区画に応答するパターンの検出と第2のコード区画に応答するパターンの認識との間の経過時間に基づきウェブ部材14の歪みを計算する。
(もっと読む)
電子部品実装装置および電子部品実装装置における画像読取り方法
【課題】画像読取りのための所要時間の短縮を可能とし、部品搭載動作のタクトタイムを改善することができる電子部品実装装置および電子部品実装装置における画像読取り方法を提供することを目的とする。
【解決手段】基板搬送機構2を挟んだ両側に部品搭載機構が配置された構成の電子部品実装装置において、搭載ヘッド14A,14Bに保持された電子部品の画像を下方から読み取る第1の画像読取り部6A、第2の画像読取り部6Bの構成を、当該画像読取り部に対応する搭載ヘッドを基板搬送方向であるX方向、X方向に直交するY方向へそれぞれ移動させて画像の読み取りを行う第1方向走査動作、第2方向走査動作のいずれによっても画像の読み取りが可能な構成とする。これにより、部品搭載動作において第1方向走査動作、第2方向走査動作のいずれかタクトタイムロスのない方を選択することができる。
(もっと読む)
2,121 - 2,140 / 5,630
[ Back to top ]