
Fターム[2F065JJ26]の内容
光学的手段による測長装置 (194,290) | 受光部 (23,546) | 1つの受光部の素子数 (9,727) | 多数 (6,943) | 2次元状 (5,630)
Fターム[2F065JJ26]に分類される特許
2,061 - 2,080 / 5,630
形状測定装置

【課題】測定精度を向上させる。
【解決手段】投影パタン24により、投影パタンが被検物13に投影され、像面パタン32a乃至32cにより、被検物13において反射または拡散した光が、像面パタンに応じて透過されて、CCDセンサ34a乃至34cに入射させる。そして、投影パタン24と像面パタン32a乃至32cとの位相関係に基づく、CCDセンサ34a乃至34cの画素ごとの校正データと、像面パタン32a乃至32cの位相が、投影パタン24の位相に対して相対的にずらされた複数の状態の被検物13をCCDセンサ34a乃至34cが撮像して得られた画像の輝度情報とを用いて、被検物13の形状が算出される。本発明は、例えば、被検物の形状を測定する形状測定装置に適用できる。
(もっと読む)
ロボットの座標の結合方法

【課題】ロボットアーム先端のフランジにカメラを取り付けてなる視覚検査装置において、カメラによってフランジ座標Fとカメラ座標Cとの関係を求める。
【解決手段】フランジ11をフランジ座標FのXYZ軸に沿って移動させた時のカメラ12の撮像画面上での移動ベクトルを求め、これに基づいてフランジ座標Fに対するカメラ座標Cの傾きを演算する。フランジ11をカメラ座標CのZc軸を中心に回転させたときのマーカMの撮影画面およびフランジ11をフランジ座標Fの原点を通るカメラ座標CのZc軸と平行な直線を中心に回転させたときのマーカMの撮影画面によってフランジ座標F上でのカメラ座標Cの位置を求める。
(もっと読む)
光軸検出装置、光軸検出システム、ターゲット、光軸検出方法
【課題】画像を撮像する複数の撮像装置の光軸のずれを検出する光軸検出装置において、撮像装置の光軸方向のずれを効率よく検出できるようにすることを目的とする。
【解決手段】撮像装置の前方に配置された複数種類のターゲットを認識する認識手段と、上記ターゲットを認識した位置に基づいて光軸のずれを検出する検出手段と、を備え、上記認識手段は、上記撮像装置で撮像した撮像画像の画素のうちから、上記撮像画像の一部の画素集合を選択し、当該一部の画素集合内の画素の輝度に関する所定の和算および減算からなる演算に基づいて、当該演算の結果が最大値または最小値となる上記画素集合を探索する探索手段を複数種類備え、上記探索手段が探索した上記最大値または最小値に基づいて、上記ターゲットを認識する。
(もっと読む)
ロボットシステム、ロボット制御装置およびロボット制御方法
【課題】劣化した画像に写し込まれたPSFから、劣化しない画像を復元してロボットの位置決めを行う。
【解決手段】ロボットシステム5は、アーム17を有するロボット10と、アーム17の移動先のワーク130の近傍に配置された点滅する基準マーク150と、ワーク130と基準マーク150が一緒に撮影された撮影画像であって、アーム17に設置され、移動中に撮影することにより基準マーク150が輝点列として写る劣化した撮影画像を出力するデジタルカメラ20と、撮影画像から輝点列を抽出する輝点列抽出部104と、輝点列を補間した線分をPSFとして、PSFを用いて画像変換することにより、劣化した撮影画像から劣化していない画像を復元する画像復元部106と、復元した画像からワーク130の位置を算出する位置算出部110と、算出した位置に基づいて、アーム17を移動させるべく制御するロボット動作制御部115と、を備える。
(もっと読む)
ロボットシステム、ロボット制御装置およびロボット制御方法
【課題】劣化した画像に写し込まれたマーカより推定したPSFから、劣化しない元画像を復元してロボットの位置決めを行う。
【解決手段】ロボットシステム5は、アーム17を有するロボット10と、アーム17の移動先であるワーク130の近傍に配置された基準パターン150と、ワーク130と基準パターン150が一緒に撮影された撮影画像であり、アーム17に設置され、アーム17の移動中に撮影することにより基準パターン150が軌跡像として写る劣化した撮影画像を出力するデジタルカメラ20と、撮影画像の中から軌跡像を抽出する基準パターン抽出部104と、抽出した軌跡像をPSFとした変換により、劣化していない画像を復元する画像復元部106と、復元した画像からワーク130の位置を算出する位置算出部110と、算出した位置に基づいて、アーム17を移動させるべく制御するロボット動作制御部115と、を備える。
(もっと読む)
原木の3次元形状測定装置および方法
【課題】原木の3次元形状(仮軸芯と直交する断面での輪郭)を全長にわたってより正確に測定できるようにする。
【解決手段】仮軸芯TSに平行な線状光線LB1,LB2を照射した状態で原木RWをカメラ20で撮影する。そして、長手方向のどこの箇所をとっても原木RWの外周面に接して写っている線状光線LB1,LB2の撮影画像を用いて所定の演算を行うことにより、仮軸芯TS上に所定間隔毎に定めた複数の位置から、原木RWの外周面上で線状光線LB1,LB2が当たっている位置までの各距離をそれぞれ算出する。これにより、従来は見落とされていた表面の凹凸を含めて、仮軸芯TSから原木RWの外周面までの正確な距離を原木RWの全長にわたって細かく求めることができるようにする。
(もっと読む)
衣料と併用するための印形
【課題】トラッキングマークが表示された衣料品を着用している人の数を数える方法を提供する。
【解決手段】この方法は、視界内の人によって着用された衣料品に表示されたトラッキングマークを写すためのカメラと、カメラからの画像を受信し、画像中のトラッキングマークを識別するためのトラッキングマーク認識モジュールと、このトラッキングマーク認識モジュールによって認識されたトラッキングマークに基づいてコンピュータ機能を実行するためのプロセッサとを含むコンピュータ制御の認識デバイスを準備し、トラッキングマーク認識モジュールを用いて、カメラから与えられる画像から、衣料品に表示されたトラッキングマークを認識することを含む。コンピュータ機能は、トラッキングマーク認識モジュールによって認識されたトラッキングマークの数を数えることである。
(もっと読む)
能動的立体視によるタイヤ表面の凹凸評価
本発明は、タイヤPの表面のディジタル凹凸像を収集する装置であって、立体視像の収集のための2つのカラーカメラ(13a,13b)を有し、各カメラは、所与の原色(R,G,B)のためのN個の1次イメージセンサ(131a,132a,133a,131b,132b,133b)を有し、Nは、2以上であり、カメラは、照明手段(231,232,233)の使用によりタイヤ表面の所定の領域(Z)に向かって放出され(E)、タイヤ表面により反射された(F)光を収集するよう配置され、収集装置は、各々独立して且つ同一方向に沿ってカメラの原色(R,G,B)のうちの1つに対応した波長を持つ光を所与の幅(L1,L2・・・LN)の交互に並んだ照明バンド及び非照明バンドから成るフリンジ系(S1,S2・・・SN)に従って、タイヤ表面の領域(Z)上に同時に投射するN個の照明手段(231,232,233)を有することを特徴とする収集装置に関する。 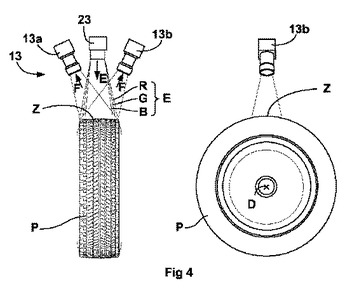 (もっと読む)
(もっと読む)
表面欠陥評価装置
【課題】対応する測定点と基準点との間の距離を逐次収束させる逐次収束処理に基づいて測定点と基準点とを位置合わせしたのち、測定点と基準点との空間位置座標から適正に表面欠陥を判定する技術を提供する。
【解決手段】測定対象物の測定点と測定対象物の基準表面形状に対応する基準点との間の距離を逐次収束させる逐次収束処理に基づいて前記測定点と前記基準点とを位置合わせした後の測定点データと基準点データとに基づいて測定対象物の表面欠陥を評価する。表面欠陥評価において、基準点と適正に対応せず互いに隣接する複数の測定点からなる誤対応測定点群の分布密度に基づいて当該誤対応測定点群によって規定される表面領域を表面欠陥と判定する。
(もっと読む)
被検査体の検査装置
【課題】被検査体の立体形状を精度良く把握するための画像データを簡易な構成で取得することができる被検査体の検査装置を提供する。
【解決手段】外観検査装置において、第1ラインセンサ〜第3ラインセンサは、第1走査ライン130〜第3走査ライン134のそれぞれの映像を各々が走査する。パターン照明源は、基板の被検査面に斜め方向から光を照射して被検査面に検査パターンを形成させる。解析ユニットは、基板を走査して得られた画像データを利用して、位相シフト法により被検査面の高さを検査する。第1ラインセンサ〜第3ラインセンサ、およびパターン照明源は、第1走査ライン130〜第3走査ライン134の数をn、第1走査ライン130〜第3走査ライン134の間隔をa、副走査方向における検査パターンの周期をPvとしたときに、n×a=Pvとなるよう走査ラインの間隔および検査パターンの周期が設定されている。
(もっと読む)
算出装置、撮像装置、算出方法、方法、及びプログラム
【課題】偏光イメージングの精度を向上させる算出装置、撮像装置、算出方法、方法及びプログラムを提供する。
【解決手段】偏光状態が異なる光をそれぞれ透過する複数の偏光フィルタをそれぞれ含む複数の偏光フィルタユニットを有する偏光パタニング素子と、前記偏光パタニング素子の前記複数の偏光フィルタを透過した光をそれぞれ受光する複数の画素を有する撮像素子とが重ね合わされた受光部に、所定の偏光状態の光を照射する照射工程と、前記所定の偏光状態の光が照射された場合の前記撮像素子の画素の画素値から、前記偏光パタニング素子と前記撮像素子との重ね合わせのズレ量を示すズレ量情報を算出するズレ量算出工程とを備える。
(もっと読む)
プリンタ
【課題】 メディアの間隔方向と共にメディア表面に平行な方向におけるメディアの位置情報を同一の読取器で直接検出して、プリント精度の向上と低コスト化を高いレベルで両立したプリンタの提供。
【解決手段】 メディアの表面を読み取る読取器(4)は、発光素子(41)とイメージセンサ(42)を含む。発光素子(41)からの光をメディア(3)に斜入射させ、斜入射した光の拡散反射光および正反射光を、共通のイメージセンサ(42)でそれぞれ検出して、読取器(4)に対するメディア(3)の間隔およびメディア表面に平行な方向における位置情報を検出する。
(もっと読む)
形状測定装置
【課題】貫通孔を有するワークを、貫通孔が所定軸方向に平行となるように、短時間で載置可能に構成された形状測定装置を提供する。
【解決手段】形状測定装置は、貫通孔12aを有するワーク12を載置可能に構成され且つX軸及びY軸に回転可能に構成された回転テーブル13a、貫通孔12aの一方側からZ軸に平行に光を照射する光源13b、貫通孔12aの他方側に配置され且つ貫通孔12aを通過した光源13bからの光を受光してその受光した光に基づく輝度を測定するCCDカメラ18a、回転テーブル13aによるワーク12の回転角度をCCDカメラ18aにて測定された輝度に基づき制御する制御部35を備える。制御部35は、回転テーブル13aによりワーク12を所定角度ずつ回転させる毎に、CCDカメラ18aにより輝度を測定させ、その輝度が最大となる角度に回転テーブル13aの回転角度を設定する。
(もっと読む)
キャリブレーションターゲット及びそれを用いた車載用キャリブレーションシステム
【課題】 隣接する車両用のキャリブレーションターゲットを誤って検知するのを防止するキャリブレーションターゲットを提供すること。
【解決手段】 キャリブレーションターゲットは、まず、マーカボード枠101と、この枠101の内側にあって、この枠101と接することなく、この枠101と同色で、かつ所定面積を持つ2つのマーカ102と、この枠101及び各マーカ102とは異なる色を持ち、この枠101と各マーカ102の間にあるマーカ外領域103とを含むマーカボード104を備える。キャリブレーションターゲットはさらに、車載用の撮像装置の光軸を基準として、マーカボートと線対称に配置される反転マーカボード105を備える。ここで、反転マーカボード105は、マーカ外領域103と同色のマーカボード枠108及びマーカ109と、マーカ102又はマーカボード枠101と同色のマーカ外領域110とを含む。
(もっと読む)
物体形状評価装置
【課題】測定装置の測定技術上の条件から、特定の測定領域でその測定誤差が大きくなるような場合においても測定点群と基準点群との合同変換が適正に行われ、その結果、測定対象物の物体形状評価が適正に行われる物体形状評価装置を提供する。
【解決手段】 測定対象物の形状に対応する多数の測定点と、測定対象物の基準形状に対応する多数の基準点との間の距離を逐次収束させる逐次収束処理に基づいて測定点と基準点とを位置合わせし、位置合わせ後の測定点データと基準点データとに基づいて測定対象物の形状を評価する物体形状評価装置。位置合わせ処理において、隣接する前記測定点の間の隣接点間距離又は隣接する前記基準点の間の隣接点間距離に基づいて隣接点間距離重み係数を決定し、当該隣接点間距離重み係数が逐次収束処理における逐次収束評価値を求める際に用いられる。
(もっと読む)
被検査体の検査装置
【課題】撮像装置に要するコストを抑制しつつ基板上の部品の高さを把握する。
【解決手段】基板検査システムにおいて、ミラー角度制御部は、被検査面の垂線に対する角度の絶対値が互いに異なる撮像角度から見た基板2の映像をラインセンサが走査できるよう撮像角度を切り替える。ミラー角度制御部は、ラインセンサから基板2への光路長が変化しないよう撮像角度を切り替える。ミラー角度制御部は、基板2からの光をラインセンサに向けて反射するハーフミラー42の角度を、ラインセンサから基板2への光路長が変化しないよう変更して撮像角度を切り替える。このときミラー角度制御部は、基板2の表面に対して垂直な垂直撮像角度と、基板2の表面に対して傾斜した傾斜撮像角度とを切り替える。
(もっと読む)
バーニア及び露光位置の測定方法
【課題】ブラックマトリックスに対する着色画素の位置ズレを算出するバーニアで、顕微鏡の焦点深度に影響されず、測定用マークのフリンジ部に影響されず精度よく、安定して位置ズレを算出するバーニア、及び露光位置の測定方法を提供する。
【解決手段】1)バーニアV2は、第一測定用マークM11と第二測定用マークM12で構成され、2)第一測定用マークは、遮光部Sと第一開口部Ka−Aと第二開口部Ka−Bからなり、第二測定用マークは、遮光部上に形成されており、3)第二測定用マークの重心Dは、第一開口部の重心Aと第二開口部の重心Bを結ぶ直線を底辺とする二等辺三角形又は直角二等辺三角形の頂点Cに位置すること。バーニアから一定距離離れた位置に、測定に用いる顕微鏡を移動させるためのターゲットマークTMを備えていること。
(もっと読む)
金属板の腐食深さ測定装置及び腐食深さ測定方法
【課題】金属板の複数の測定点に対する腐食深さの測定作業を効率的に行い、かつ金属板に変形が生じている場合でも、変形の影響により金属板に対する厚さ検出の精度が低下することを防止する。
【解決手段】腐食深さ測定装置10では、金属板120の表側面における複数の測定点がレーザ光B1の反射点を順次通過し、かつ裏側面における測定点と一致する複数の対向点がレーザ光B2の反射点を順次通過するように、金属板120を保持したホルダ62をX方向又はY方向に沿って移動させる。これにより、レーザ変位センサ76により複数の測定点136までの距離を順次検出でき、かつレーザ変位センサ78により対向点までの距離を順次検出できるので、複数の測定点における金属板120の厚さを求めることができる。
(もっと読む)
加工用工具または加工対象物の形状測定装置
【課題】加工用工具または加工対象物の形状を計測する装置において、カメラの数を増やさずに撮像範囲(言い換えれば分解能)を向上させる。
【解決手段】カメラ1内の撮像素子2は、当該撮像素子2の一辺に沿って2以上のエリアA,B…に区分されており、当該形状測定装置は、区分されたエリア毎に、測定対象4の撮影範囲を、カメラ1と測定対象4とを相対移動させる第1の方向(X軸方向)とは垂直な成分を含む方向にずらすための多段傾斜ミラー3と、カメラ1と測定対象とを第1の方向に相対移動させる相対移動手段と、カメラ1と測定対象4とを前記相対移動手段により相対移動させながら撮像素子2に撮像を行わせ、各撮像時点での各エリアの撮像画像を合成する合成手段と、を備える。
(もっと読む)
曲率半径測定方法および装置
【課題】曲率半径測定方法および装置において、被測定物の温度が曲率半径測定の測定基準温度と異なる場合でも迅速に曲率半径を測定することができるようにする。
【解決手段】被検レンズ2のレンズ面2aの球心位置および面頂位置の間の距離を測定することにより、レンズ面2aの曲率半径を測定する曲率半径測定方法であって、少なくともレンズ面2aの球心位置の測定時における被検レンズ2の温度を測定する温度測定工程と、この温度測定工程で測定された被検レンズ2の温度、および被検レンズ2の線膨張係数を用いて、レンズ面2aの球心位置と面頂位置の間の距離を曲率半径測定の測定基準温度での距離に換算して、レンズ面2aの曲率半径を算出する曲率半径算出工程とを備える方法を用いる。このため、曲率半径測定装置50は、被検レンズ2の温度を測定するサーモグラフィ6を備える。
(もっと読む)
2,061 - 2,080 / 5,630
[ Back to top ]