
Fターム[2F065JJ26]の内容
光学的手段による測長装置 (194,290) | 受光部 (23,546) | 1つの受光部の素子数 (9,727) | 多数 (6,943) | 2次元状 (5,630)
Fターム[2F065JJ26]に分類される特許
2,021 - 2,040 / 5,630
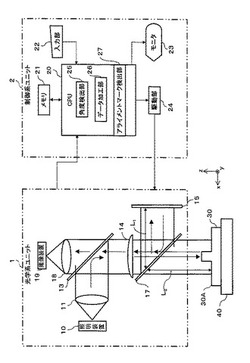
干渉光学系撮像画像を用いた干渉縞によるアライメントマーク検出方法およびそれを用いた装置
【課題】
干渉光学系において干渉縞のある取得画像からアライメントマーク位置を検出する方法およびこれを用いた高速な装置を提供する。
【解決手段】
干渉光学系における撮像画像は撮像対象面30Aと参照面15から同一光路を戻る反射光同士の干渉現象により、撮像装置19で撮像した画像には干渉縞が現れる。このとき、分布干渉縞の角度θだけ画像を回転させた回転画像を作成し、その画像に対して1次元微分フィルタを掛けることにより干渉縞の輝度変動の影響を無くす事が出来、取得画像のアライメントマークの位置を正しく検出する事が出来る。
(もっと読む)
光学顕微鏡、及びスペクトル測定方法

【課題】短時間にスペクトル測定を行うことができる光学顕微鏡、及びスペクトル測定方法を提供すること。
【解決手段】本発明の第1の態様にかかる光学顕微鏡は、対物レンズ23を介してレーザ光を試料24に照射するステップと、対物レンズ23を介して、試料で反射した反射光を検出するステップと、レーザ光の焦点位置を光軸方向に変化させるステップと、レーザ光の焦点位置を変化させたときの反射光の検出結果に基づいて、スペクトル測定を行う焦点位置を抽出するステップと、抽出された焦点位置になるように調整するステップと、焦点位置を調整した状態で、レーザ光の照射により試料から出射される出射光をレーザ光から分岐するステップと、レーザ光から分岐された出射光のスペクトルを分光器31で測定するステップと、を備えるものである。
(もっと読む)
画像処理装置、画像処理方法、及びプログラム
【課題】画像処理の高速化を図りつつ、処理精度の向上を実現する。
【解決手段】相互に対応するブロック画像61a(m、n)、62a(m、n)に基づいて、相互に対応するマッチング画像SMA1、SMA2をそれぞれ設定する。そして、一方のマッチング画像に含まれる特徴点の対応点が、他方のマッチング画像から抽出できなかった場合には、視差の発生方向に隣接するブロック画像同士を結合し、新たなブロック画像61a(m、(n−1)−(n+1))、62a(m、(n−1)−(n+1))をそれぞれ規定する。次に、新たに規定されたブロック画像に基づいて、再度マッチング画像を設定する。
(もっと読む)
対象物認識装置および対象物認識方法
【課題】対象物の位置および向きを精度良く認識することが可能な対象物認識方法および対象物認識装置を提供する。
【解決手段】撮像装置121が対象物1を撮像することにより第一撮像画像を取得し、対象物1の二次元外形データと第一撮像画像とを比較することにより撮像装置121と対象物1との相対位置を判定し、当該相対位置に基づいて仮想空間に撮像装置121、照明装置110および対象物1の配置を設定し、当該仮想空間に基づいて第一仮想空間画像を生成し、第一仮想空間画像と第一撮像画像とを比較することにより前記相対位置の判定結果の正誤を判定し、撮像装置121が対象物1を撮像する位置を変更して撮像することにより第二撮像画像を取得し、当該変更を仮想空間に反映して第二仮想空間画像を生成し、第二仮想空間画像と第二撮像画像とを比較することにより前記相対位置の判定結果の正誤を判定する。
(もっと読む)
干渉縞計測方法及び干渉計
【課題】画像取り込み速度が変化した場合でも、解析に必要な枚数の干渉縞画像を取得し、精度の高い解析を行う。
【解決手段】光束を測定光と参照光とに分割して干渉縞を形成し、フリンジスキャニングによって画像取得部に取得した複数の干渉縞画像から選択した解析画像を用いて被測定面の形状を算出する干渉縞計測方法は、画像取得部の画像取得速度を計測する画像取得速度計測工程S10と、参照面を移動させながら複数の干渉縞画像を候補画像として取得する候補画像取得工程S20と、各候補画像の輝度変化データから、各候補画像の位相変化を算出する位相変化算出工程S30と、位相変化に基づいて、候補画像の中から解析画像を選択する画像選択工程S40とを備え、画像取得部の画像取得速度は、画像取得速度計測工程S10における計測結果に基づいて所定速度に設定され、参照面の移動速度は、画像取得部に設定された所定速度に基づいて設定される。
(もっと読む)
位置計測装置、認識対象物およびプログラム
【課題】対象物に備えられた点光源および基準部材を撮影し、撮影された画像から点光源および基準部材の位置を高精度に計測することで、対象物の位置計測を高精度に行うことができる位置計測装置等を提供する。
【解決手段】対象物100に配置する基準部材16の像を撮影するカメラ30と、カメラ30により撮影された基準部材16の像から3点以上の第1基準点の位置および1点以上の第2基準点の位置を導出し、第1基準点および第2基準点の対象物100における位置関係を取得し、画像中での第1基準点および第2基準点の位置と対象物100上での第1基準点および第2基準点の位置関係より対象物100の位置を求める演算装置40と、を備えることを特徴とする位置計測装置300。
(もっと読む)
物体表面法線ベクトルマップ作成方法
【課題】少ない演算回数で精度の高い物体表面法線ベクトルマップを作成できるようにする。
【解決手段】同一の固定カメラ12により、同一の対象物10を光源1〜4を個別使用して、対応する4つの原画像を取得し、各原画像の対応する画素毎に、Lambertの余弦則に基づいて各光源毎に拡散反射光の輝度式を求め、各光源毎に求められた4以上の輝度式の各3式を連立させ、各光源毎の仮の物体表面法線ベクトルを求め、求められた4以上の仮の物体表面法線ベクトルに基づいて、当該画素の真の物体表面法線ベクトルを決定すると共に、以上の処理を対象とする各画素について実行し、前記対象物を撮像した画像における物体表面法線ベクトルマップを作成する。
(もっと読む)
高さ情報取得装置、高さ情報取得方法、及びプログラム
【課題】エラー領域の判定精度を向上させて、対象物の表面形状の計測をより適切に行えるようにする。
【解決手段】制御部18は、焦点位置が異なる標本1の複数の顕微鏡画像を構成する各画素についてのコントラスト評価値を算出する。また、各画素に対し、所定の閾値を、画素の輝度に基づき画素毎に設定する。そして、各顕微鏡画像での位置が同一である画素についての最大コントラスト評価値と該閾値とを画素毎に比較し、最大コントラスト評価値が閾値よりも低い画素で構成されるエラー領域を抽出する。非エラー領域の画素については、該画素で表されている標本1の部位の高さの情報を、各顕微鏡画像の焦点位置の情報に基づき取得する。エラー領域の画素については、該高さの情報を、非エラー領域に含まれている各画素について取得した高さの情報に基づく補間演算により取得する。
(もっと読む)
形状測定装置および形状測定方法
【課題】顕微鏡の被写界深度を大幅に超えた立体形状を持つ被測定物を、被測定物や顕微鏡等を移動させることなく、短時間で効率的に、高精度な形状測定を行うことができる形状測定装置および形状測定方法を提供する。
【解決手段】本発明に係る形状測定装置1は、被測定物100に向けて平行光Rを照射する照明装置30と、被測定物100を挟んで照明装置30と対向する位置に、前記平行光の光軸と自身の光軸が一致するように配置される被写界深度の大きな顕微鏡40と、顕微鏡40により拡大された被測定物100の像を、0.2μm乃至2μmの分解能で撮像するカメラ50と、平行光Rが被測定物100の測定部分の外周形状を映し出すように平行光R内に被測定物100の測定部分を配置する保持装置20と、を備える。
(もっと読む)
低コヒーレンス干渉計、低コヒーレンス干渉装置、及び低コヒーレンス干渉測定方法
【課題】光路長差のスキャン範囲の幅を縮小して測定の効率化を図るのに適した構成の低コヒーレンス干渉計を提供する。
【解決手段】本発明を例示する低コヒーレンス干渉計の一態様は、測定対象となる距離範囲を低コヒーレンス干渉法で測定するための光周波数幅を有し、かつその光周波数方向にかけて強度変調された広帯域変調光を生成する光源部(1、21)と、前記光源部が生成した広帯域変調光を分岐して測定対象物(12)と参照物(15)との双方へ導くと共に、前記測定対象物からの測定光と前記参照物からの参照光とを干渉させて干渉信号を生成する光学系(9、18)とを備える。
(もっと読む)
ワーク識別方法およびワーク識別装置
【課題】カメラ画像からワークの種類および姿勢を認識するときの処理時間を短縮する。
【解決手段】ワークWiは外面Fごとに方向性を有する識別可能なマークCが付与され、ロボット10は前記マークCおよび前記ワークWiを撮像する撮像手段12と前記マークCが撮像されたマークマスタ画像Mを格納する第1マスタ画像格納手段42と、前記ワークWiが撮像された前記ワークWiの姿勢ごとのワークマスタ画像Nを格納する第2マスタ画像格納手段43とを有し、上記画像を取り込む画像入力工程S3と、前記マーク画像Pと前記マークマスタ画像Mとを比較する第1画像比較工程S4と、その結果から前記ワークWiの姿勢を判定する姿勢判定工程S5と、判定結果の姿勢に対応する前記ワークマスタ画像Nと前記ワーク画像Rとを比較する第2画像比較工程S6と、その結果から前記ワークWiの種類を判定する種類判定工程S7とを有するワーク識別方法。
(もっと読む)
配筋情報取得装置及び配筋情報取得方法
【課題】簡単に精度よく異形鉄筋の配筋情報を取得する。
【解決手段】400万画素以上の設定が可能であり、かつ、オートフォーカス機能を切れるデジタルカメラを決定し(S701、S702)、異形鉄筋を含む撮影対象部位を決定する(S705)。次に、撮影対象となる複数の異形鉄筋のうち、両端2本にマーカを付与し(S707)、デジタルカメラを用いて2m離れた位置から撮影する(S708)。そして、デジタルカメラから携帯端末へ撮影された異形鉄筋の画像データを転送し、携帯端末を用いて画像処理を実行する(S714)。画像処理においては、画像データにおける1ピクセルあたりの長さである1ピクセル長を特定し、画像データにおける異形鉄筋の径長のピクセル数をカウントし、径長のピクセル数と、1ピクセル長とを乗ずることによって、径長を算出する。
(もっと読む)
光波干渉測定装置
【課題】回転対称で複雑な被検面の形状を高精度に光干渉計測できるようにする。
【解決手段】面中心軸Cが測定光軸Lと一致した基準姿勢から、被検面80を径方向に分割してなる複数の輪帯状領域上に測定光軸Lが順次移動するように、被検面80の相対姿勢を順次変更し、相対姿勢が変更される毎に被検面80を回転軸E回りに回転せしめる。回転する被検面80に対して、ミロー対物干渉光学系23より収束しながら進行する測定光を照射し、複数の回転位置毎に、各回転位置別干渉縞を1次元イメージセンサ32により撮像する。撮像された各回転位置別干渉縞に基づき各輪帯領域別形状情報を求め、これらを繋ぎ合わせることにより測定領域全域の形状情報を求める。
(もっと読む)
測定装置及び被検物の測定方法
【課題】 被検物の表面の高さや形状を高精度に測定する。
【解決手段】 第1の微小開口を通過した照明光を被検物に向けて照射させ、被検物からの反射光を得る共焦点光学系と、第2の微小開口を通過する反射光を検出する光検出部と、反射光における波面収差を検出する収差検出部と、被検物に対する共焦点光学系の焦点位置を光軸方向に変位させる変位部と、変位部により共焦点光学系の位置焦点を複数変位させたときに得られる反射光の強度と波面収差とに基づいて、被検物の表面形状を計測する計測部と、を備えたことを特徴とする。
(もっと読む)
低コヒーレンス走査干渉法における走査エラー補正
被験物体からの試験光と参照光とを合成して、検出器上に干渉パターンを形成する光学系を含む広帯域走査干渉計システムから構成される装置。本装置は、共通の光源から検出器への試験光と参照光との間の光路差(OPD)を走査するように構成されたステージと、一連のOPD増分の各々に対する干渉パターンを記録する検出器を含む検出系であって、各OPD増分の周波数がフレームレートを定義する、検出系とを含む。光学系は、走査時のOPDの変化を示す少なくとも2つの監視干渉信号を生成するように構成され、検出系は、監視干渉信号を記録するように構成される。本装置は、フレームレートより高い周波数において、OPD増分への摂動に対する感度でOPD増分に関する情報を決定するように構成されたプロセッサを含む。  (もっと読む)
(もっと読む)
計測装置
【課題】管状の被計測物の計測を容易に行うことができる計測装置を提供することを課題としている。
【解決手段】管状の被計測物2の内周面2a全周にわたって光を照射する照射手段4と、照射手段4により照射された光の反射光を投影する投影手段6と、投影手段6に投影された像を撮像する撮像手段7とを備え、照射手段4と撮像手段7とを対向して配置し、投影手段6を、照射手段4と撮像手段7との間に配置し、照射手段4を、前記内周面2aの照射手段4と撮像手段7との間に線状のリング光Lを形成するように、光を円錐状に拡げて内周面2aに照射する構成とし、投影手段6に前記リング光Lを投影し、投影手段に投影されたリング光を撮像手段7により撮像し、被計測物2の計測を行う。
(もっと読む)
印刷位置ずれ検査装置および方法
【課題】全印刷物の品質保証を行うことができ、不良印刷物を特定し除去することができる印刷位置ずれ検査方法と装置を提供する。
【解決手段】タイミングマーク、見当マーク、印刷番号を含む固定情報が予め印刷された印刷物に対して、見当マークを含む可変情報を印刷して得た印刷物における印刷位置ずれ検査方法であって、走行する印刷物に印刷されたタイミングマークを検出するタイミングマーク検出過程と、その検出のタイミングで瞬間発光し固定情報と可変情報の見当マークと印刷番号が隣接して印刷された見当マーク領域を照明する瞬間発光過程と、瞬間発光したときの見当マーク領域を撮像することにより撮像画像を得る撮像過程と、撮像画像に基づいて印刷位置ずれ量と印刷番号とを取得し紐付けして検査情報ログとして保存する検査情報ログ保存過程とを有する。
(もっと読む)
身長検出システムおよびこれを用いた自動改札機
【課題】 人物の身長を正確に検出することのできる身長検出システムおよびこれを用いた自動改札機を提供する。
【解決手段】 少なくとも一対のカメラ2で撮影した画像のフレームの差分を検出し、このフレームの差分から差分輪郭線を抽出するフレーム差分解析部4と、各カメラ2で撮影された画像の静止画像から静止画輪郭線を抽出して、この静止画輪郭線から頭部候補点を検出する頭頂部解析部5と、各カメラ2による画像に基づいて検出された各頭部候補点とカメラ2とを結ぶ直線を決定して真の頭頂部を決定し、この真の頭頂部と各カメラ2aの位置情報に基づいて頭頂点の三次元位置を特定し、この三次元位置から人物の身長を判定する身長判定部6と、を備えている。
(もっと読む)
三次元CT計測システム
【課題】1台の極めて少数のカメラあるいはビデオカメラでシステムを構成する経済的な三次元CT計測システムを提供する。
【解決手段】被写体を立体的に取り囲む複数のミラーを介することにより,一台のカメラによって多方向同時撮影を実施し,得られた多方向同時撮影画像を三次元CT(コンピューター断層)再構成処理により、瞬間三次元輝度分布を得る三次元CT計測システム。
(もっと読む)
外観検査装置
【課題】本発明は、電子部品をプリント配線基板に半田付け実装する際、フロー半田槽に浮遊する半田の酸化物を付着しない、品質の良いプリント配線基板装置を提供することを課題とする。
【解決手段】プリント配線基板上に形成された貫通孔に電子部品のリード端子を挿入し、前記プリント配線基板をフロー半田槽に搬送することにより、前記電子部品のリード端子と、前記貫通孔の周囲のランドとを半田付け実装する際に用いる、プリント配線基板の半田付け用パレットにおいて、前記パレットの先端は、前記フロー半田槽に搬送する搬送方向に対し、略V字状に形成することを特徴とする。かかる構成により、電子部品をプリント配線基板に半田付け実装する際、フロー半田槽に浮遊する半田の酸化物が付着することが無く、品質の良いプリント配線基板装置を提供できる。
(もっと読む)
2,021 - 2,040 / 5,630
[ Back to top ]