
Fターム[2F065JJ26]の内容
光学的手段による測長装置 (194,290) | 受光部 (23,546) | 1つの受光部の素子数 (9,727) | 多数 (6,943) | 2次元状 (5,630)
Fターム[2F065JJ26]に分類される特許
1,961 - 1,980 / 5,630
3次元形状計測装置および方法

【課題】撮像素子単体により得られる解像度よりも高い解像度を高い精度で得ること。
【解決手段】対象物Qに向かって投射した検出光Uの反射光を撮像素子52の撮像面で受光し、撮像素子で取得された撮像データDSに基づいて対象物の3次元形状を計測する3次元形状計測装置1であって、撮像素子が微小距離移動可能に設けられており、撮像素子の移動前と移動後とにおいて撮像を行って撮像データDSを取得するとともに、そのときの撮像素子の移動量KDを計測し、撮像素子の移動前に取得した撮像データ、移動後に取得した撮像データ、および撮像素子の移動量KDとに基づいて、いずれの撮像データから得られる3次元形状データよりも解像度の高い3次元形状データを得る。
(もっと読む)
マシンビジョンを用いたオブジェクトの3次元アライメントのためのシステムと方法
本発明はモデル化されたオブジェクトまたはシーンの3次元アライメントを決定するためのシステムおよび方法を提供する。校正後、3D(ステレオ)センサスシステムはオブジェクトを観測して、当該オブジェクトを包含するシーンの実行時3D表現を導出する。各ステレオヘッドからの修正画像は、それらのエッジ特徴を強調するために前処理される。次に少なくとも2個(1対)の前処理された修正画像で、所定の特徴を最初の画像上に特定し、次いで同じ特徴を別の画像中に特定することによりステレオマッチングプロセスが同時に実行される。各対のカメラについて3Dポイントが計算されて3Dポイントクラウドが導出される。3Dポイントクラウドは各カメラ対の3Dポイントをワールド校正からワールド3D空間に変換することによって生成される。ポイントクラウドからの3Dデータの量は、より高水準の幾何学形状(HLGS)、たとえば線分を抽出することによって削減される。実行時に検出されたHLGSがモデルのHLGSに対応させられて、候補3D姿勢を生み出す。粗い採点で姿勢の数を減らす。さらに残った候補姿勢は一層精緻なプロセスに入れられる。次にこれらの残った候補姿勢は、たとえば候補姿勢の検出された3Dまたは2Dポイントをより大きいセットの対応する3次元または2次元モデルポイントに適合させることによって検証され、その場合に最も近いマッチが最良の精緻な3次元姿勢である。 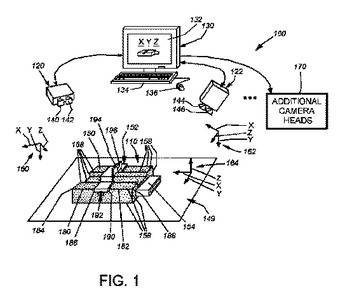 (もっと読む)
(もっと読む)
検査条件設定方法、検査条件設定装置、検査条件設定プログラム

【課題】電子回路の外観検査前の設定作業を効率化する。
【解決手段】検査条件設定装置(検査装置1)は、半導体、液晶回路、またはプリント基板などの電子回路を複数搭載する被検査物の外観検査をCADデータ(41)と被検査物画像(43)との対比によって行う前に、当該外観検査の条件を予め設定する。当該装置は、粗画像生成手段(ST21)と、輪郭抽出手段(ST22)と、認識手段(ST23)と、を備える。粗画像生成手段は、上記対比を行うために上記CADデータから生成する模範画像よりも、粗い画素密度の粗画像(45)を、上記CADデータから生成する。輪郭抽出手段は、上記粗画像から、ひとまとまりの個片(61、62等)の輪郭を各々抽出する。認識手段は、上記輪郭から、上記個片のパターンの一致を判定し、1または複数のパターンの個片を認識し、同一パターンのグループごとに上記個片を分類する。
(もっと読む)
位置検出部と撮像部との相対位置関係の特定
【課題】位置検出部と撮像部とを有する装置における位置検出部と撮像部との相対位置関係を精度良くかつ簡易に特定する。
【解決手段】位置検出部と撮像部とを有する装置における位置検出部と撮像部との相対位置関係を特定する方法は、(a)位置検出部により検出される基準部と基準部との位置関係が予め設定された参照線とを有する対象面を準備する工程と、(b)位置検出部により基準部を検出する工程と、(c)位置検出部による基準部の検出時に撮像によって画像を取得する工程と、(d)取得された画像における参照線の画像の位置に基づき位置検出部と撮像部との相対位置関係を特定する工程と、を備える。
(もっと読む)
円形の幅寸法測定装置
【課題】円形状のエッジを自動検出して円形を求め、該円形の幅寸法の測定を可能にする円形の幅寸法測定装置を提供する。
【解決手段】全体として1または2以上の層を有する円形状の物体を上方から撮像する撮像手段と、前記撮像手段によって得られた画像から前記円形状の仮中心点を求める手段と、前記仮中心点から円形の複数のエッジを求める手段と、前記円形の複数のエッジから仮想円の中心を求める手段と、前記仮想円の中心から仮想円を求める手段と、前記仮想円から検出円を求め、該検出円の幅を円形状の幅寸法とする幅寸法算出手段とを有することを特徴とする円形の幅寸法測定装置。
(もっと読む)
測定方法及び測定装置
【課題】被検面としての非球面の形状を高精度に測定することができる測定方法を提供する。
【解決手段】球面波を形成する光束を用いて非球面を有する被検面を照明し、前記被検面の形状を測定する測定方法であって、球面波の曲率中心が前記非球面の非球面軸上にある状態で前記非球面軸の方向に前記被検面を駆動して複数の位置に順に位置決めし、前記複数の位置のそれぞれにおいて、前記被検面からの光束と参照面からの光束との干渉パターンを検出する第1の検出ステップと、前記複数の位置のそれぞれから前記非球面軸に垂直な方向に前記被検面を既知の量だけシフトした複数のシフト位置のそれぞれに位置決めし、前記複数のシフト位置のそれぞれにおいて、前記被検面からの光束と前記参照面からの光束との干渉パターンを検出する第2の検出ステップと、を有することを特徴とする測定方法を提供する。
(もっと読む)
形状測定装置
【課題】観察条件に関わらず、被測定物にピントが合う位置と、測定光路と参照光路との光路差0となる位置とを一致させることができる形状測定装置を提供する。
【解決手段】被測定物14の膜下の表面にピントが合う位置において、参照光L1と測定光L2の2系統の光路差が0となるように、図3に示すように、アクチュエータ16を駆動して、楔状部材12bを光軸直交方向に移動させる。これにより、図3に示すように、楔状部材12a、12bの重合部の厚さが変化(Δ)するので、かかる重合部を通過する測定光L2の距離が変化し、これにより測定光L2の光路長を変えることができる。
(もっと読む)
オートコリメータ装置
【課題】
被検体測定面の水平面に対する傾きと、回転する被検体の場合には回転中心に対する偏芯をほぼ同時に検出し測定する。
【解決手段】
レーザ光源1からの光束を回転する被検体Dに向かわせ、その測定面d1からの反射光をテレセントリック対物レンズ7で検出して対物レンズ10で受光部11に投影する傾き測定用光学系13を形成する。また被検体測定面d1に予め施した指標をテレセントリック対物レンズ7で検出して対物レンズ10で受光部11に投影する顕微鏡用光学系15を形成する。
両光学系13、15を結合し、夫々が検出した像を共通の受光部11に投影し、表示部Cに表示して測定する。
(もっと読む)
回路パターン検査装置および検査方法およびテストパターン
【課題】回路パターンの欠陥検査方法では、基準となるパターンの画像データを膨張・収縮といった操作を行い、許容できる最大の寸法と最小の寸法を有するマスタパターンを作製し、被検査物から得た画像データをこのマスタパターンと比較することで欠陥を発見する。このマスタパターンを作製する膨張・収縮という画像処理においては、画素毎にその周囲の画素を加減する処理が行われるが、様々な線幅が含まれる基準パターンの場合は線幅の比率によって一定の割合で膨張・収縮することが困難であった。
【解決手段】基準パターンに属する画素に背景からの距離データを付与し、周辺の画素に自分より大きな距離データがなくなるまで画素を削除し、基準パターンの骨格を代表する骨格パターンを作製する。この骨格パターンに属する画素が有する距離データに所定倍率をかけた範囲にある画素をマスタパターンとする。
(もっと読む)
チャックテーブルに保持された被加工物の高さ位置計測装置
【課題】チャックテーブルに載置された被加工物の上面高さ位置を広範囲に渡って同時に計測することができる高さ位置計測装置を提供する。
【解決手段】高さ位置検出手段7は多波長光源71と、多波長光源71が発光した検出光の波長に対応してX軸方向に直交するY軸方向に分光するグレーディングミラー72と、グレーディングミラー72によって分光された検出光を集光して被加工物の上面に照射する第1の色収差補正型集光レンズ73と、第1の色収差補正型集光レンズを通して照射されチャックテーブルに保持された被加工物Wの上面で反射した検出光を集光する第2の色収差補正型集光レンズ74と、第2の色収差補正型集光レンズによって集光された検出光を受光する受光手段75と、制御手段とを具備している。制御手段は、X軸方向位置検出手段および受光手段75からの検出信号に基づいて被加工物WのX,Y座標値におけるZ軸方向の位置を求める。
(もっと読む)
特に歯科医療を目的とした物体表面の三次元測定方法
特に歯科医療を目的とした、位相シフト法を使用した光学的二重三角測量による物体表面の三次元測定のために、少なくとも2つの、同一の物体(1)の異なる三角測量角(θ1,θ2)による三次元測定が行われ、この際第1の三角測量角が分かっており、少なくともおおよその第2の三角測量角が分かっている。位相画像(φ1(x,y))の各画素(Bi)について第2の位相画像(φ2(x,y))を用いて波数(wz(xi,yi))が決定され、この整数の割合が、各画素(Bi)が存在する明確な測定範囲(E1)の規則(n)に対応する。波数(wz(x,y))は、少なくともmの画素(Bi)の試験的測定において波数の整数でない割合(wz(xi,yi)−[wz(xi,yi])が最小化されるように最適化される。 (もっと読む)
評価装置および評価方法
【課題】繰り返しパターンの異常の原因を特定することが可能な評価装置を提供する。
【解決手段】評価装置1において、第1撮像素子31は、検光子21の透過軸の方位が偏光子17の透過軸に対して90度±3度の傾斜角度となるように検光子21を回転させて、それぞれの条件でフーリエ画像を撮像し、演算処理部40は、2枚のフーリエ画像における信号強度の差分に基づいて、ドーズ量の変化に起因する繰り返しパターン3の状態変化を検出し、2枚のフーリエ画像における信号強度の平均に基づいて、フォーカスの変化に起因する繰り返しパターン3の状態変化を検出するようになっている。
(もっと読む)
形状測定装置およびプログラム
【課題】重複画像における誤対応点を自動判定することで、三次元形状の測定に必要な初期値を始めとする測定値を自動で取得する。
【解決手段】
形状測定装置1は、重複撮影領域で測定対象物18を撮影する撮影部2〜9と、撮影部2〜9によって撮影された重複画像における測定対象物18の特徴点の位置を対応付ける特徴点対応付部21と、特徴点対応付部21で対応付けた特徴点に基づき、測定対象物18のモデルを形成する測定モデル形成部23と、測定モデル形成部23で形成した測定モデルと、別の測定対象物の基準モデルとに基づいて、誤対応点を判定する誤対応点判定部24と、誤対応点判定部24で誤対応点と判定された点を除いた特徴点の位置等に基づき、測定対象物18の三次元形状を求める三次元形状測定部25とを備える。
(もっと読む)
液滴の観測方法および観測装置
【課題】ノズルから吐出された液滴を、より実機に近い状態で観測できる観測システムを提供する。
【解決手段】ノズルから吐出された液滴3の画像をインターバルTiをおいて断続的に取得する取得部23と、時間的に前後に得られた第1の画像φ31と第2の画像φ32の間で、それらに含まれる液滴3の同一性を判断する認識部24とを有する測定ユニット10を提供する。画像毎に含まれている液滴3の同一性を判断することにより、速度の測定の最初の画像に含まれた液滴と、最後の画像に含まれた液滴とが同一であることを保証できるので、飛翔方向が予測できないような液滴でも自動的に観察でき、速度や飛翔方向を測定できる。
(もっと読む)
測定方法及び測定装置
【課題】被検面としての非球面の形状を高精度に測定する測定方法を提供する。
【解決手段】球面波を形成する光束を用いて非球面を有する被検面を照明し、前記被検面の形状を測定する測定方法であって、球面波の曲率中心が前記非球面の非球面軸上にある状態で前記非球面軸の方向に前記被検面を駆動して複数の位置に順に位置決めし、前記複数の位置のそれぞれにおいて、前記被検面からの光束と参照面からの光束との干渉パターンを検出する第1の検出ステップと、前記複数の位置のそれぞれから前記非球面軸の方向に前記被検面を既知の量だけシフトした複数のシフト位置のそれぞれに位置決めし、前記複数のシフト位置のそれぞれにおいて、前記被検面からの光束と前記参照面からの光束との干渉パターンを検出する第2の検出ステップと、を有することを特徴とする測定方法を提供する。
(もっと読む)
測定検査装置及び方法
【課題】被測定体としてのタイヤ構成部材の大小に関らず形状の検査の精度に差が生じない測定検査装置及びその方法を提供する。
【解決手段】タイヤの構成部材を被測定体として一定長さの帯状又は線状の光を照射して、当該光の光照射部からの反射光を受光して被測定体の形状を測定するセンサと、このセンサの出力により被測定体の形状を演算する形状処理手段を備えた測定検査装置により、被測定体の別部位を個別に測定する複数個の各センサの出力で得られる各被測定体の形状を形状処理手段で合成し、形状処理手段により合成された被測定体の合成形状と予め用意された基準形状とを判定手段により比較して形状の良否を判定する。
(もっと読む)
三次元形状計測装置、三次元形状計測方法、三次元形状計測プログラム
【課題】被測定物の材質が、例えば、透明な樹脂などであるときは、被測定部に照射された光が被測定物の内部で散乱してしまうため、ストライプがぼけてしまうことがある。そのため、カメラによって撮像された画像において、ストライプとして識別できない場合がある。
【解決手段】第2のストライプを、第1の隣接距離以下の移動距離で移動させる第2のストライプ移動制御部と、マスターとなる三次元形状物の画像の座標、移動距離から算出された位置、長さが記憶されたテーブルを参照し、第2のストライプが照射された被測定部の画像の座標から被測定部の長さを検出する第2の長さ検出部と、を備え、ストライプ選択制御部は、第1のストライプが照射された被測定部の画像において、ストライプとして識別されたときは、第1のストライプを選択制御し、ストライプとして識別されなかったときは、第2のストライプを選択制御する。
(もっと読む)
光構造観察装置及びその構造情報処理方法
【課題】層構造を有する被計測物体内の中間層を基板とした構造情報を視覚的に判断する。
【解決手段】処理部22は、光構造情報検出部220、光立体構造像構築部221、中間層抽出手段としての中間層抽出部222、層平坦化手段としての平坦化処理部223、構造像変換手段としての光立体構造像変換部224、領域情報抽出手段及び水平断面画像生成手段としての水平断層画像生成部225、画像合成手段としての画像合成部226、表示制御手段としての表示制御部227及びI/F部228を備えて構成される。
(もっと読む)
機械部品の非破壊検査の方法
本発明は、機械部品(14)の非破壊検査のための自動化された方法に関し、画像センサ(24)と、照明光源(26)と、画像センサ(24)、光源(26)、および機械部品(14)の相対的移動のための手段(18、22)とを含む、デジタル画像を取得するための機器(10)を使用してデータベース内に記憶される基準画像と部品の表面の画像を比較するステップを含む。 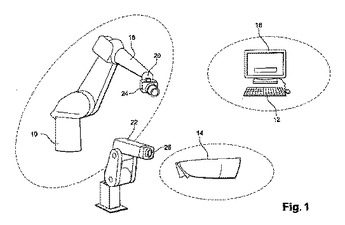 (もっと読む)
(もっと読む)
光学式測定装置
【課題】測定対象に設けられた穴の傾斜角等を高精度で測定すること。
【解決手段】光源部106は、断面が線状で所定間隔に配置された複数の平行な光ビームから成る測定用光150を出力する。光検出部111、114は、測定対象130の穴132周辺領域で反射した測定用光150を検出する。制御部126は、光検出部111、114が検出した複数の光ビームと穴132周縁部との交点の位置座標を用いて各光ビームの垂直2等分線を求め、穴132と交差しない複数の光ビームと前記垂直2等分線との交点の位置座標と前記光ビームの既知の間隔とを用いて穴132の傾斜角を算出する。
(もっと読む)
1,961 - 1,980 / 5,630
[ Back to top ]