
Fターム[2F065JJ26]の内容
光学的手段による測長装置 (194,290) | 受光部 (23,546) | 1つの受光部の素子数 (9,727) | 多数 (6,943) | 2次元状 (5,630)
Fターム[2F065JJ26]に分類される特許
1,941 - 1,960 / 5,630
ウェーハを検査するためのシステム及び方法

【課題】 ウェーハを検査するための方法およびシステム。
【解決手段】 このシステムは、光検査ヘッド、ウェーハテーブル、ウェーハスタック、XYテーブルおよび振動絶縁装置を含む。光検査ヘッドは、複数の照明器、画像収集装置、対物レンズおよび他の光学部品を含む。このシステム及び方法は、明視野画像、暗視野画像、3D形状画像および検査画像の収集を可能にする。収集画像は、画像信号に変換され、かつ処理のためにプログラマブルコントローラに伝送される。ウェーハが動いている間、検査が実行される。収集画像は、ウェーハ上の欠陥を検出するための基準画像と比較される。基準画像を作り出すための例示的な基準作成プロセスおよび例示的な画像検査プロセスもまた、本発明によって提供される。基準画像作成プロセスは、自動プロセスである。
(もっと読む)
位置計測装置およびプログラム

【課題】簡単な構成で対象物の位置計測を行うことができ、また、高精度に位置計測を行うことができる位置計測装置等を提供する。
【解決手段】対象物100に備えられたバーコード10を撮影するカメラ30と、カメラ30により撮影されたバーコード10の画像から4点以上の注目点を抽出し、バーコード10から注目点の位置情報を取得し、注目点の位置関係と注目点の位置情報とからバーコード10の位置を求めることで対象物100の位置を求める演算装置40と、を備えることを特徴とする位置計測装置300。
(もっと読む)
表面特性測定装置
波長選択器5が広帯域光源4の波長を選択する。光導波器BS1、BS2が、波長選択器からの光を測定経路に沿ってサンプル表面の領域に向けて誘導すると共に基準経路に沿って基準表面に向けて誘導し、サンプル表面の領域によって反射された光及び基準表面によって反射された光が干渉してインターフェログラムを生成するようにしている。コントローラ20が、波長選択器を制御して、波長選択器によって選択される波長を変更する。記録器63が、連続した画像を記録し、各画像は、波長選択器によって選択された波長のそれぞれ1つによって生成されたインターフェログラムを表す。データプロセッサ18、180が、記録された画像を処理して、サンプル表面の少なくとも一部の表面プロファイル及び表面高マップのうちの少なくとも一方を作成する。基準経路を制御して、振動、熱的効果及び乱流のような環境影響を補償することができる。データプロセッサは、グラフィックス処理装置を用いて、ピクセルデータを並列に処理することを可能にすることができる。  (もっと読む)
(もっと読む)
焦点センサ
【課題】焦点検出部として従来とは異なる範囲に対する十分な分解能を有し、表面までの範囲(距離)の全体を検出することができ、設計上あるいは範囲要件の制限を解消できる焦点センサを提供すること。
【解決手段】焦点センサ100は、照明光源10からの照明光束13を、コリメータレンズ15、第1光束分割面20、第2光束分割面25、対物レンズ30を経てワーク表面40で反射させる。反射光束13’は逆の経路を進み、第1光束分割面20を透過して二重範囲焦点検出装置110に入射される。二重範囲焦点検出装置110は、高分解能焦点検出装置として高分解能サブ開口レンズ120A,120Bおよび高分解能光検出器133A,133Bを備え、広範囲焦点検出装置として広範囲サブ開口125および広範囲光検出器135を備える。二重範囲焦点検出装置110の入射部分にはリレーレンズ装置を設けてもよい。二重範囲焦点検出装置の代わりに単一拡張範囲のシャックハルトマン焦点検出装置を用いてもよい。
(もっと読む)
厚さ測定装置及び厚さ測定方法
【課題】表面からの反射光の受光位置と裏面からの反射光の受光位置とを判別することが困難な場合であっても光透過性物体の厚さを測定することが可能な厚さ測定装置及び厚さ測定方法を提供する。
【解決手段】厚さ測定装置1は、投光部2と、配置面11A上に光透過性物体9が無い場合における配置面反射光L23と、配置面上に光透過性物体が在る場合における裏面反射光L22とをそれぞれ受光可能な受光部13と、受光部における反射光の受光位置X3及び裏面反射光の受光位置X2間の距離ΔX2と、光透過性物体の厚さd1とにおける相関関係に基づき光透過性物体の厚さを測定する測定部8と、を備える。
(もっと読む)
物体の遠隔検知のためのセンサおよび映像システム
【課題】物体が拡散媒質内に配置されているときに物体の位置および/または形状を遠隔測定する比較的簡単なセンサを提供する。
【解決手段】センサと物体との間の距離に対して短いコヒーレンス長を有する光源110と、送られたビームを入射ビーム126と基準ビーム123とに分割するビームスプリッタ112と、基準ビーム123と、入射ビーム126により照射された物体120から反射されたビーム127との干渉受光時にホログラムを生成し、基準ビーム123の作用による異方性回折によりクリスタルガラスから送り返される回折ビーム124でホログラムを再生する光屈折クリスタルガラス114と、回折ビーム124の受光時に情報を生成する検出装置116とを含み、それによって、検出装置116は、クリスタルガラスから回折ビーム124だけを受け取る。
(もっと読む)
アレイテスト装置と、該アレイテスト装置の基板一地点位置測定方法と、カメラアセンブリーに撮像された特定位置座標測定方法
【課題】本発明は、アレイテスト装置と、アレイテスト装置の基板一地点位置測定方法と、カメラアセンブリーに撮像された特定位置座標測定方法を提供する。
【解決手段】本発明のアレイテスト装置は、テストされる基板を支持するテスト部を備える。少なくとも一つのモジュレータヘッドは、テスト部上に隣接配置され少なくともテスト部に位置した基板の不良位置を検出する。モジュレータヘッドは、固定ブロックを備える。カメラアセンブリーは、基準カメラ及び隣接カメラが一定に配されるように、固定ブロックに結合される。座標測定用モジュレータブロックは、固定ブロックに分離可能に結合され、カメラアセンブリと基板との間に位置し、カメラアセンブリを成すカメラの焦点距離に合わせて配された位置表示部材を備える。位置表示部材は、基準カメラによって撮像される基準位置マーク及び隣接カメラに撮像される少なくとも一つの対応位置マークが形成される。
(もっと読む)
光学式の形状・位置測定方法および隙間形成用治具
【課題】隙間を通過する光の透過光像を検出して、対象物体の輪郭形状や位置を精度良く測定できる光学式の形状・位置測定方法を提案すること。
【解決手段】工具2の突起1の理想輪郭形状よりも一回り大きい凹状の端面3を備える板状の隙間形成用治具4を用意する。端面3の最奥部分には円弧状の凹状輪郭の端面5が形成されている。端面3の内部に突起1を進入させて、端面3と突起1の輪郭形状部分との隙間6の幅を観察しながら徐々に接近させ、隙間6の幅が寸法Δ1になった時点で接近を停止し、端面5と先端部分1aの間に、隙間6よりも広い隙間7を局部的に形成する。工具2および隙間形成用治具4の厚み方向の一方の側に光源8を配置して隙間7に測定光を照射し、他方の側に配置したCCDカメラ等の受光装置9で隙間7を通る光の透過光像を検出する。微小な曲率半径の先端部分1aの実輪郭形状や位置を、透過光像から明確に把握できる。
(もっと読む)
計測装置及び計測方法
【課題】撮像素子を用いた被写体の変異量計測において、非移動被写体の減算演算を簡素化し、減算精度の向上により測定精度を向上させる。
【解決手段】第1の画像を構成する第1の画素群と第2の画像を構成する第2の画素群とが所定の配列形態にしたがって交互に配列された単一の撮像素子を用いて、それぞれ露光時間の異なる第1の画像と第2の画像とを取得し、第1の画像と第2の画像との差分に基づいて変異する被写体を検出し、第1の画像と第2の画像との差分に基づいて変異する被写体の画像内の位置、移動速度、移動方向、及び面積の変化量のうち少なくとも1つを算出する算出して出力する。
(もっと読む)
ウェーハ欠陥の高速オンライン電気光学的検出のための方法及びシステム
【課題】本発明は、集積回路ダイ又はチップを特徴とする半導体ウェーハのパターン化構造において、ランダムに存在する製造欠陥を電気光学的に検出するための方法及びシステムに関する。
【解決手段】パルス式レーザの短い光パルスで、顕微鏡レンズを有する電気光学カメラシステムの視野を照射し、各々4つの二次元CCDマトリックス光検出器のアレイを含む6つの検出器集合体から形成された光学撮像システムの焦点面に光検出器の表面を光学的に形成する焦点面アセンブリ上に移動中のウェーハを撮像する。二次元CCDマトリックス光検出器の各々が、200万ピクセルのマトリックス電子画像を作成し、異なるCCDマトリックス検出器の同時作成画像を画像処理技術により並行処理し、撮像視野を、基準となる別の視野と比較し、対応ピクセルの差異を、ウェーハダイ欠陥の存在を示すものとして検出する。
(もっと読む)
アレイテスト装置及び該アレイテスト装置の基板一地点位置測定方法
【課題】本発明は、アレイテスト装置と、アレイテスト装置の基板一地点位置測定方法を提供する。
【解決手段】本発明におけるアレイテスト装置は、テスト部と、テストモジュールと、位置表示部材とを含む。テスト部は、テストされる基板を支持する。テストモジュールは、少なくとも水平移動可能に配され、テスト部に配された基板の不良位置を検出する少なくとも一つのモジュレーターヘッドを備える。位置表示部材は、テスト部の水平方向の外郭にモジュレーターヘッドの移動経路上でモジュレーターヘッドと隣接して配され、基準位置マーク及び少なくとも一つの対応位置マークが形成された位置表示部材を含む。モジュレーターヘッドは、基準カメラ及び少なくとも一つの隣接カメラが配されたカメラアセンブリーを備え、位置表示部材の基準位置マークは、基準カメラによって撮像され、対応位置マークは、隣接カメラによって撮像される。
(もっと読む)
カメラキャリブレーションターゲット、およびカメラキャリブレーション方法
【課題】安定した精度でカメラキャリブレーションを実現するキャリブレーション用ターゲットを提供する。
【解決手段】車両に異なる状態で取り付けられたカメラのキャリブレーションを同じ設備で実施する際に使用するカメラキャリブレーション用のキャリブレーションターゲットであって、大きさが異なる複数の相似形の図形より構成され、当該相似図形は大きさの小さい図形がより大きな図形の中にその互いの辺が接触しないように配置され、小さい図形を構成する辺と大きい図形を構成する辺の間に、小さい図形を構成する辺から所定の領域をガードエリアとして有する一連の図形を1つのマーカとし、該マーカを複数配置することを特徴とする。
(もっと読む)
周波数推定方法、周波数推定装置、表面形状測定方法及び表面形状測定装置
【課題】計算負荷が低く、処理時間が短くて済む周波数推定方法、周波数推定装置、表面形状測定方法及び表面形状測定装置を提供すること。
【解決手段】干渉縞や電気信号などの有周期性の観測データにおける周波数を推定する周波数推定方法であって、観測データを取得するステップと、仮定した任意周波数の正弦波状関数をモデル信号として前記観測データに適合させるステップと、前記観測データと前記モデル信号との部分的な位相のずれ量を求めるステップと、前記モデル信号の周波数と、前記位相のずれ量についての位相勾配とに基づいて、前記観測データの周波数を算出するステップとを有することを特徴とする。
(もっと読む)
ウェブ基準を使用して位相固定したウェブ位置信号
ウェブの移動エンコーダ信号を検知したウェブ基準信号に位相固定すること含む、ウェブ位置の決定を向上させるための手法。基材の長手方向軸に沿って配置された基準が検知され、対応するセンサ信号が生成される。推定ウェブ位置は、1つ以上のエンコーダ信号によって提供される。センサ信号とエンコーダ信号との間の位相差が計算され、位相差に基づいてウェブ位置の誤差が決定される。ウェブ位置の誤差信号は、ウェブ位置の決定の精度を向上させるエンコーダ信号を調整するためにフィードバックすることができる。  (もっと読む)
(もっと読む)
3次元形状計測装置および方法
【課題】撮像素子単体により得られる解像度よりも高い解像度を高い精度で得ること。
【解決手段】対象物Qに向かって投射した検出光Uの反射光を撮像素子52の撮像面で受光し、撮像素子で取得された撮像データDSに基づいて対象物の3次元形状を計測する3次元形状計測装置1であって、撮像素子が微小距離移動可能に設けられており、撮像素子の移動前と移動後とにおいて撮像を行って撮像データDSを取得するとともに、そのときの撮像素子の移動量KDを計測し、撮像素子の移動前に取得した撮像データ、移動後に取得した撮像データ、および撮像素子の移動量KDとに基づいて、いずれの撮像データから得られる3次元形状データよりも解像度の高い3次元形状データを得る。
(もっと読む)
検査条件設定方法、検査条件設定装置、検査条件設定プログラム
【課題】電子回路の外観検査前の設定作業を効率化する。
【解決手段】検査条件設定装置(検査装置1)は、半導体、液晶回路、またはプリント基板などの電子回路を複数搭載する被検査物の外観検査をCADデータ(41)と被検査物画像(43)との対比によって行う前に、当該外観検査の条件を予め設定する。当該装置は、粗画像生成手段(ST21)と、輪郭抽出手段(ST22)と、認識手段(ST23)と、を備える。粗画像生成手段は、上記対比を行うために上記CADデータから生成する模範画像よりも、粗い画素密度の粗画像(45)を、上記CADデータから生成する。輪郭抽出手段は、上記粗画像から、ひとまとまりの個片(61、62等)の輪郭を各々抽出する。認識手段は、上記輪郭から、上記個片のパターンの一致を判定し、1または複数のパターンの個片を認識し、同一パターンのグループごとに上記個片を分類する。
(もっと読む)
位置検出部と撮像部との相対位置関係の特定
【課題】位置検出部と撮像部とを有する装置における位置検出部と撮像部との相対位置関係を精度良くかつ簡易に特定する。
【解決手段】位置検出部と撮像部とを有する装置における位置検出部と撮像部との相対位置関係を特定する方法は、(a)位置検出部により検出される基準部と基準部との位置関係が予め設定された参照線とを有する対象面を準備する工程と、(b)位置検出部により基準部を検出する工程と、(c)位置検出部による基準部の検出時に撮像によって画像を取得する工程と、(d)取得された画像における参照線の画像の位置に基づき位置検出部と撮像部との相対位置関係を特定する工程と、を備える。
(もっと読む)
円形の幅寸法測定装置
【課題】円形状のエッジを自動検出して円形を求め、該円形の幅寸法の測定を可能にする円形の幅寸法測定装置を提供する。
【解決手段】全体として1または2以上の層を有する円形状の物体を上方から撮像する撮像手段と、前記撮像手段によって得られた画像から前記円形状の仮中心点を求める手段と、前記仮中心点から円形の複数のエッジを求める手段と、前記円形の複数のエッジから仮想円の中心を求める手段と、前記仮想円の中心から仮想円を求める手段と、前記仮想円から検出円を求め、該検出円の幅を円形状の幅寸法とする幅寸法算出手段とを有することを特徴とする円形の幅寸法測定装置。
(もっと読む)
表面形状測定方法、表面形状測定装置および位置合わせ装置
【課題】 測定対象物の表面形状を非接触で測定するための表面形状測定方法、表面形状測定装置、位置合わせ装置に関し、光源の種類に拘わらず高精度な測定を行うことを目的とする。
【解決手段】 被対象物の表面像を結像する結像光学系と、被対象物の基準面と共役関係にある像面との間に、電界の付与により屈折率を変化可能な電気光学素子を配置し、電気光学素子の屈折率を電界の付与により変化して像面上で被対象物の表面像が形成されるようにし、この時に電気光学素子に付与した電界値に基づいて、被対象物の表面の基準面からの変位量を求める。
(もっと読む)
マシンビジョンを用いたオブジェクトの3次元アライメントのためのシステムと方法
本発明はモデル化されたオブジェクトまたはシーンの3次元アライメントを決定するためのシステムおよび方法を提供する。校正後、3D(ステレオ)センサスシステムはオブジェクトを観測して、当該オブジェクトを包含するシーンの実行時3D表現を導出する。各ステレオヘッドからの修正画像は、それらのエッジ特徴を強調するために前処理される。次に少なくとも2個(1対)の前処理された修正画像で、所定の特徴を最初の画像上に特定し、次いで同じ特徴を別の画像中に特定することによりステレオマッチングプロセスが同時に実行される。各対のカメラについて3Dポイントが計算されて3Dポイントクラウドが導出される。3Dポイントクラウドは各カメラ対の3Dポイントをワールド校正からワールド3D空間に変換することによって生成される。ポイントクラウドからの3Dデータの量は、より高水準の幾何学形状(HLGS)、たとえば線分を抽出することによって削減される。実行時に検出されたHLGSがモデルのHLGSに対応させられて、候補3D姿勢を生み出す。粗い採点で姿勢の数を減らす。さらに残った候補姿勢は一層精緻なプロセスに入れられる。次にこれらの残った候補姿勢は、たとえば候補姿勢の検出された3Dまたは2Dポイントをより大きいセットの対応する3次元または2次元モデルポイントに適合させることによって検証され、その場合に最も近いマッチが最良の精緻な3次元姿勢である。 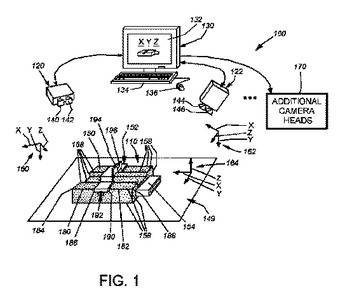 (もっと読む)
(もっと読む)
1,941 - 1,960 / 5,630
[ Back to top ]