
Fターム[2F065PP04]の内容
光学的手段による測長装置 (194,290) | 装置全体の構造 (6,881) | 検出器の支持、保持関連 (1,622) | 3次元駆動 (250)
Fターム[2F065PP04]に分類される特許
241 - 250 / 250
形状測定方法、及び形状測定装置

【課題】弾性を有する被測定物の外形を短時間で測定することができる形状測定方法、及び形状測定装置を提供する。
【解決手段】形状測定装置では、CCDカメラの位置座標が検出可能となっている。バッキング16の形状測定を行う際には、バッキング16をCCDカメラにて撮像し、CCDカメラの位置を調整して画像モニタ23に表示された交点Kとバッキング16における測定点(図7(a)(b)では始点S)とを一致させる。そして、交点Kと測定点とが一致した状態の時に検出されたCCDカメラの位置座標をバッキング16における測定点(図7(a)(b)では始点S)の座標として読み取る。
(もっと読む)
表面形状および/または膜厚測定方法およびその装置

【課題】 透明膜で覆われた測定対象物の透明膜の膜厚、表面高さ、および測定対象物の表面高さを精度よく求める。
【解決手段】 予め求めた干渉縞の物理モデルに基づいて、透明膜の膜厚および表面高さを求める計算アルゴリズムと、実測によって取得した干渉縞の強度値に基づく各画素における複数個の強度値を利用して求めた干渉縞波形の直流成分、正弦成分の振幅、および余弦成分の振幅とを利用することにより、透明膜で覆われた測定対象物の透明膜の膜厚、透明膜の表面高さ、および測定対象面の表面高さの少なくともいずれか1つを求める。
(もっと読む)
デバイスの動作状態測定装置
【課題】デバイスの様々な動作状態を検知可能な測定装置を、ジャイロセンサー等の部品を用いずに実現することを課題とする。
【解決手段】ゲームコントローラGCは、ハンドル1とカラーパレット21と制御部4とを備える。ハンドル1に備えられたCCD13は、ハンドル1の様々な動作状態において、カラーパレット21を撮像する。制御部4は、CCD13が撮像したカラーパレット21の画像を解析することにより、ハンドル1の動作状態を解析する。たとえば、ハンドル1の上下方向、左右方向への回動量、ハンドル1の回転角、ハンドル1の前後方向への移動量などを測定する。
(もっと読む)
画像入力装置及び欠陥検査方法
【課題】 被検査体について装置を大型化することなく精度の良い欠陥検査を行うことができるようにする。
【解決手段】 撮像素子の撮像面より大きな面積の結像面上に結像された被検査体像を撮像するものであって、被検査体像を等分割したときに各分割部分9a,9b,9c,9dに対する各々の撮像素子の撮像面の位置関係が同じとなるように配置された複数個の撮像素子61,62,63,64と、結像面上で複数個の撮像素子61,62,63,64の撮像面を一撮像位置から次の撮像位置へ同時に移動させる移動手段7,8を備える構成とする。
(もっと読む)
検査路設定及び検査領域決定方法
【課題】取り扱いが容易であり、全ての検査領域を確実にカバーできる検査路設定方法、及び検査領域決定方法を提供すること。
【解決手段】本発明は、三次元対象物(3)を検査するために、少なくとも1つの光学撮像装置(4)、特にカメラの検査路(2)を設定する方法に関する。撮像装置(4)と対象物(3)は、変位装置(5、6)によって、互いに相対運動が可能である。本発明に係る方法によれば、算術演算ユニット(10)によって、対象物(3)及び/又は対象物上の検査される領域(12)の設計データ(8)、特にCADデータ及び/又はセンサによって決定されたデータ、及び撮像装置(4)の光学撮像特性に基づいて、光学撮像装置(4)の検査路(2)が自動的に決定される。この場合、ある規定の幾何学的関係が、撮像装置(4)と検査される表面との間に設定される。
(もっと読む)
欠陥位置特定方法及びマーキングシステム
【課題】三次元対象物で検知される欠陥を高い精度で位置特定し、場合によっては、マーキングするための方法を提供すること
【解決手段】本発明は、三次元対象物(2)、特に塗装された車体上の欠陥の位置を特定する方法及びマーキングシステムに関し、撮像装置(3、4)によって、欠陥が検知され、その位置が特定される。本発明によれば、対象物(2)の設計データ(CADデータ)と撮像装置(3、4)の光学撮像特性と対象物(2)が、撮像時に既知であり、これらによって、欠陥の位置が決定され、場合によっては、スプレーヘッドによってマーキングされる。
(もっと読む)
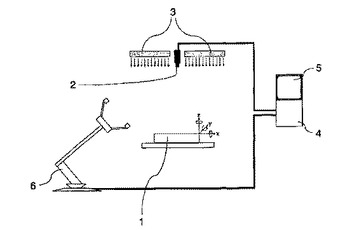
陰影測定による制御の方法と装置
本発明は、2つのジョイント(13、14)の周りを往復するアーム(8)に取り付けられる発光器(5)及び受光器(6)を備えた、レーザオンブロスコーピー(laser ombroscopy)を用いる制御デバイスに関する。前記ジョイントの回転軸(y、z)が、互いに、及び発光器と受光器との間の主光路(x)に対して垂直であることにより、制御された輪郭の画像を高い精度で復元することができる。本発明の装置は特に、溶接法、中でも窪んだ丸溝に適用することができる。
 (もっと読む)
(もっと読む)
物体の3D位置の非接触式光学的測定方法及び測定装置
この発明は物体の3D位置、すなわち、ある幾何学的特性が公知の物体の3D位置及び3D配向の非接触式光学的決定のための方法及び装置に関する。前記発明の目的は単純な手段で、高測定速度、精度で、調査物体に関する完全な3D情報を調査することである。この目的のため、物体画像がカメラによって生成され、その生成画像に基づく物体の3D位置が、検出幾何学的特性に関する画像情報によって計算される。
 (もっと読む)
(もっと読む)
カメラを備えた機器を制御システムによって所望位置へ動かす方法及びその制御システム
制御システム(7)によってカメラ(5)を備えた機器(4)を所望位置(10)へ動かす方法。カメラ(5)は、制御システム(7)に接続されている。動かしている間、カメラによって写真が撮影される。制御システム(7)によって単位時間あたりに処理される写真の枚数は、機器(4)と所望位置(10)の間隔が短くなると、増加される。
 (もっと読む)
(もっと読む)
多層プリント配線板と、その層間ズレの測定方法
【課題】 多層プリント配線板の内層の各導体層の変形量を観測、記録する。
【解決手段】 多層プリント配線板60の内層用の両面配線板61の表裏の導体層に中実ガイドマーク22と中空ガイドマーク23が形成され、例えば、中実ガイドマーク22−1bに、隣接した導体層に設けられた中空ガイドマーク23−2aが同心に配置され、隣接した導体層毎に同心に配置された中実、中空ガイドマーク22、23を形成する。X線カメラの視野内に納まる外形のガイドマーク枠21内に、例えば3行3列に、同心の中実、中空ガイドマーク22(1a〜5a)、23(1b〜5b)の組が配されている。ガイドマーク群20は多層プリント配線板の、たとえば4隅に配置され、1個のガイドマーク群は1回のX線照射で枠内のガイドマーク全ての像を取り込み、それらの座標値が計算される。4個のガイドマーク群内のガイドマークの座標値から、各導体層に形成された配線用パターンの変形量が計算され、結果を記録できる。
(もっと読む)
241 - 250 / 250
[ Back to top ]