
Fターム[2F065PP04]の内容
光学的手段による測長装置 (194,290) | 装置全体の構造 (6,881) | 検出器の支持、保持関連 (1,622) | 3次元駆動 (250)
Fターム[2F065PP04]に分類される特許
101 - 120 / 250
パンタグラフ型集電装置の検査装置及びパンタグラフ型集電装置の検査方法
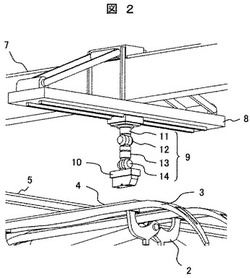
【課題】本発明は、安価にてすり板の正確な摩耗量や荒損位置を測定できるパンタグラフ型集電装置の検査装置を提供することにある。
【解決手段】本発明は、停止中の電車1のすり板4の表面に、ビームを連続的に照射してすり板4の表面形状データ33を取得し、この取得された表面形状データ33と予め取得しておいた設計データとを比較してすり板4の摩耗量を求めるようにしたのである。
このようにビームをすり板4の表面に連続的に照射して測定することで、正確な摩耗量や荒損位置を測定することが可能となり、しかも高価なビームセンサ10を複数用いる必要がなくなるので、すり板4の正確な荒損や荒損位置を安価に測定できるパンタグラフ型集電装置の検査装置を得ることができる。
(もっと読む)
ねじパラメーター測定の方法及びデバイス

空間座標系(X’、Y’、Z’)を規定するねじ付きの物体の形状を取り込む光学センサー(5)を組み入れている、空間基準システム(X、Y、Z)を規定する、測定デバイス(1)を用いて、該測定デバイス(1)は該空間基準システム(X、Y、Z)内で該ねじ付き物体を表す2次形式を記述する第1マトリックスを組み立てるコンピュータを有し、かくして該2つの空間座標系間の関係を提供する、該測定デバイスによるねじ付き物体(3)のねじパラメーターの測定方法。該方法はa)該ねじ付き物体上で該少なくとも1つの光学センサー(5)の少なくとも1つの軌跡を事前規定する過程であって、該軌跡に沿って該測定点が、該測定点の値で評価された該マトリックスが、該マトリックスが最大階数を有する条件を満足させるよう選択される、該事前規定する過程と、b)該少なくとも1つの光学センサー(5)により前記少なくとも1つの軌跡に沿う第1走査動作を行い、該事前規定された測定点のデータを取り込む過程と、c)これらのデータを該第1マトリックスに供給し、該第2空間座標系に対する該ねじ付き物体の相対位置を規定するために該第1空間座標系を該第2空間座標系に関係付ける軸変換マトリックスを計算する過程と、d)該第2空間座標系から取り込まれた全データを該第1空間座標系へ変換するために該軸変換マトリックスを使用する過程と、を具備する。 (もっと読む)
ロボットアーム装置、ロボットアーム装置の制御方法および制御プログラム
【課題】カメラがロボットアームに取り付けられたまま振動するので、カメラによって撮像された画像がぶれてしまい、輪郭が鮮明でない製品や部品の画像が生成されてしまう。従って、この画像を用いて製品や部品の位置を算出できないという課題がある。
【解決手段】製品または部品の画像を撮像するカメラ20と、加速度を検出する加速度検出部21と、カメラ20と加速度検出部21を取り付けたロボットアームと、画像を用いて製品または部品の位置を算出する位置算出部45と、カメラ20が撮像するタイミングを、加速度によって制御するタイミング制御部44と、を備えるロボットアーム装置100を提供する。
(もっと読む)
ワーク識別方法およびワーク識別装置
【課題】カメラ画像からワークの種類および姿勢を認識するときの処理時間を短縮する。
【解決手段】ワークWiは外面Fごとに方向性を有する識別可能なマークCが付与され、ロボット10は前記マークCおよび前記ワークWiを撮像する撮像手段12と前記マークCが撮像されたマークマスタ画像Mを格納する第1マスタ画像格納手段42と、前記ワークWiが撮像された前記ワークWiの姿勢ごとのワークマスタ画像Nを格納する第2マスタ画像格納手段43とを有し、上記画像を取り込む画像入力工程S3と、前記マーク画像Pと前記マークマスタ画像Mとを比較する第1画像比較工程S4と、その結果から前記ワークWiの姿勢を判定する姿勢判定工程S5と、判定結果の姿勢に対応する前記ワークマスタ画像Nと前記ワーク画像Rとを比較する第2画像比較工程S6と、その結果から前記ワークWiの種類を判定する種類判定工程S7とを有するワーク識別方法。
(もっと読む)
ロボットに取付けられたカメラを用いた三次元位置計測装置
【課題】カメラの移動を伴う対象物の三次元位置計測時に、より高精度の計測を行う。
【解決手段】三次元計測装置(7)は、複数の軸回りで回転可能または該軸沿いに並進可能に互いに結合された複数のアーム要素を備えたロボット(10)の末端軸の回転中心線(6)における末端軸の可動端側に取付けられた撮像手段(30)と、ロボットの末端軸の動作によって該撮像手段を末端軸の回転中心線回りにのみ移動させる移動手段(19)と、移動手段による撮像手段の移動の前後における撮像手段の位置と、これら位置において撮像手段によりそれぞれ撮像された対象物の画像とに基づいて、対象物の三次元位置を計測する計測手段(25)とを具備する。ロボットの末端軸の可動端側に位置する部分の重心が前記ロボットの末端軸の回転中心線上に概ね位置するのが好ましい。
(もっと読む)
ロボットシステム、ロボット制御装置およびロボット制御方法
【課題】劣化した画像に写し込まれたPSFから、劣化しない画像を復元してロボットの位置決めを行う。
【解決手段】ロボットシステム5は、アーム17を有するロボット10と、アーム17の移動先のワーク130の近傍に配置された点滅する基準マーク150と、ワーク130と基準マーク150が一緒に撮影された撮影画像であって、アーム17に設置され、移動中に撮影することにより基準マーク150が輝点列として写る劣化した撮影画像を出力するデジタルカメラ20と、撮影画像から輝点列を抽出する輝点列抽出部104と、輝点列を補間した線分をPSFとして、PSFを用いて画像変換することにより、劣化した撮影画像から劣化していない画像を復元する画像復元部106と、復元した画像からワーク130の位置を算出する位置算出部110と、算出した位置に基づいて、アーム17を移動させるべく制御するロボット動作制御部115と、を備える。
(もっと読む)
ロボットシステム、ロボット制御装置およびロボット制御方法
【課題】劣化した画像に写し込まれたマーカより推定したPSFから、劣化しない元画像を復元してロボットの位置決めを行う。
【解決手段】ロボットシステム5は、アーム17を有するロボット10と、アーム17の移動先であるワーク130の近傍に配置された基準パターン150と、ワーク130と基準パターン150が一緒に撮影された撮影画像であり、アーム17に設置され、アーム17の移動中に撮影することにより基準パターン150が軌跡像として写る劣化した撮影画像を出力するデジタルカメラ20と、撮影画像の中から軌跡像を抽出する基準パターン抽出部104と、抽出した軌跡像をPSFとした変換により、劣化していない画像を復元する画像復元部106と、復元した画像からワーク130の位置を算出する位置算出部110と、算出した位置に基づいて、アーム17を移動させるべく制御するロボット動作制御部115と、を備える。
(もっと読む)
画像測定装置
【課題】測定時間又はアライメント時間の短縮を実現する画像測定装置を提供する。
【解決手段】画像測定装置は、被測定対象を載置する測定テーブルと、被測定対象を撮像する異なる位置に設置された複数の撮像手段と、前記複数の撮像手段によって得られた前記被測定対象の画像を表示する測定表示部と、前記複数の撮像手段を前記測定テーブルに対して相対的に移動させる移動手段と、前記複数の撮像手段によって得られた前記被測定対象の画像情報を入力して前記被測定対象の測定処理を実行する測定処理手段とを備えたことを特徴とする。
(もっと読む)
合焦点方式、基板エッジの座標測定方法及び測定用マークの距離測定方法
【課題】鮮鋭度が極大値となる対象が複数あっても、測定対象の合焦点位置を他と誤認せずに得る合焦点方式、基板エッジの座標測定方法及び測定用マークの距離測定方法を提供する。
【解決手段】鮮鋭度の各極大値と、予め得らた測定対象の極大値とを対比し、得らた測定対象の極大値と合致した各極大値中の極大値の位置を合焦点位置とする。閾値を超えた鮮鋭度の検出数が予測数に満たない場合、閾値を任意のステップで下げ、或いは、最小閾値まで閾値を下げる。対象が基板エッジ2と面取りコーナー1であり、高い極大値No2の位置を基板エッジの合焦点位置とする。上記合焦点方式を用いた基板エッジの座標測定方法及び測定用マークの距離測定方法。
(もっと読む)
形状測定装置
【課題】高精度の測定を効率よく行うことができる。
【解決手段】形状測定装置11において、光学式センサ22が、所定の波長域の測定光を被検物12に照射し、被検物12および光学式センサ22は、測定光の波長域の光を遮断し、測定光の波長域以外の光を透過可能な透過窓32および33を有した筐体14に収納されている。また、透過窓32および33は、測定光の波長域の光を反射または吸収することができる。本発明は、例えば、光学的な手法により物体の形状を三次元的に計測する三次元計測装置に適用できる。
(もっと読む)
表面形状および/または膜厚測定方法およびその装置
【課題】表面を透明膜で覆われた測定対象物の透明膜の表面高さ、透明膜の裏面高さ、透明膜の膜厚、及び測定対象物の表面形状を求める。
【解決手段】参照面を光の進行方向に対して任意角度の斜め傾斜姿勢で配備して測定対象面と参照面から同一光路を戻る反射光により干渉縞を発生させる。干渉縞の各画素の強度値をCCDカメラで1回撮像し、CPUは算出対象画素毎とその近傍画素の強度値において、当該画素とその近傍画素の干渉縞波形の直流成分、正弦成分の振幅、及び余弦成分が一定であると仮定することで、干渉縞波形の直流成分、正弦成分の振幅、及び余弦成分の振幅を求めて測定対象物のパラメータおよび装置のパラメータに基づいて当該画素の光の強度値を参照面からの参照光の強度値と測定対象物からの物体光の強度値に分離する。両強度値から未知パラメータである透明膜の表面高さ、裏面高さ、膜厚、及び測定対象物の表面形状を求める。
(もっと読む)
曲面部材計測システム及び方法
【課題】曲面部材計測システム及び方法を提供する。
【解決手段】十字状レーザービーム計測器208の移動を制御する移動制御部206と、境界計測移動方向を決定する境界追跡制御部202と、移動制御部206により制御されるガントリの位置情報及び十字状レーザービーム計測器208から出力される計測値を用いて曲面部材の境界面に対する3次元計測データを算出する境界計測データ生成部204と、曲面部材内で内部計測のための両軸の経路を生成する内部経路生成部210と、内部計測移動方向を決定する内部高さ追跡制御部212と、移動制御部206により制御されるガントリの位置情報及び十字状レーザービーム計測器から出力される計測値を用いて曲面部材の内部に対する3次元計測データを算出する内部計測データ生成部214と、境界計測データと内部計測データを用いて曲面部材の3次元形状データを生成する3次元曲面生成部とを含む。
(もっと読む)
ロケーションを同定するための装置
【課題】 検査領域からデータを得るための広範囲でより正確に規定された可能性を与える。
【解決手段】 検査領域9に向けられるユーザのサイトラインを検出するためのサイトライン検出デバイス35と、前記ユーザによって出される要求を受けるための入力デバイス63と、基準座標系13に対して検査領域9における少なくとも1つのロケーション59、55を同定し、前記要求を受けたときに、前記ユーザの目が向けられる検査領域9のロケーション59、55の座標に割り当てられる座標セット(x、y、z)を与えるための装置21、23、35、37と、前記ユーザの視野において前記座標セットに応じて決定される検査領域9の少なくとも1つの点におけるデータの表示と検査領域9とを同時に見ることができるように、前記ユーザの視野に前記データを表示するためのディスプレイとを具備する。
(もっと読む)
立体3次元計測システムおよび方法
【課題】好適な立体視3次元光学式測定システムおよび方法を提供すること。
【解決手段】立体視3次元光学式測定システム(100)および方法は、表面形状の不連続性に関して高速かつロバストな態様で被検物(120)上の物理的フィーチャ(129)の位置を正確に測定する。開示された実施形態は、2つ以上の視点から、基点マーキング(199)を載せた実質的に透過性の基点プレート(190)を通して被検物(120)を撮像し得、カメラ(111、112)視野角、および被検物(120)上のフィーチャと1つ以上の基点(199)との間の見掛け相対距離は、フィーチャ位置の正確な計算を可能にし得る。
(もっと読む)
光路長の自律校正を用いた法線ベクトル追跡型超精密形状測定方法
【課題】
計測点座標と法線ベクトルの計測値から被測定物の表面形状を導出する法線ベクトル追跡型超精密形状測定方法において、現状の2軸2組のゴニオメータと1軸直進ステージの装置構成を変えることなく、ある測定手順を付加するだけで、自律的に光路長Lを校正によって決定することが可能な光路長の自律校正を用いた法線ベクトル追跡型超精密形状測定方法を提供する。
【解決手段】
各計測点毎に2軸2組のゴニオメータから得られる4つの角度データと1軸直進ステージから得られる1つの距離データとを取得し、計測点の数だけの計測値セットから形状導出アルゴリズムPにより形状を導出する際に、光路長Lを変数として複数の形状P(L)を導出し、形状変化の収束を利用して真の光路長LCと収束形状P(LC)を算出する。具体的には、形状残差の収束性を見ながら二分法により光路長を決定する。
(もっと読む)
法線ベクトル追跡型超精密形状測定装置における駆動軸制御方法
【課題】
計測点の座標と法線ベクトルの計測値から被測定物の表面形状を導出し、各軸の制御方法を工夫することによって各計測点での計測時間を短縮し、被測定物の表面形状測定の高速化を図ることが可能な法線ベクトル追跡型超精密形状測定装置における駆動軸制御方法を提供する。
【解決手段】
2軸2組のゴニオメータと、その回転中心間の距離を変える1軸直進ステージとで構成し、1組のゴニオメータは試料系2を構成し、その可動部に被測定物1を保持し、もう1組のゴニオメータは光学系3を構成し、その可動部に光源と光検出器Dを設け、2軸2組のゴニオメータと1軸の直進ステージの内、2軸1組のゴニオメータと1軸の直進ステージは、光検出器からの出力を直接軸駆動モータに入力するフルクローズドフィードバック制御し、残り2軸1組のゴニオメータはセミクローズドフィードバック制御する。
(もっと読む)
校正用治具、形状測定装置、及びオフセット算出方法
【課題】価格を低価格に抑えることが可能になると共に、高精度でオフセットを算出可能な校正用治具、形状測定装置、及び形状測定装置のオフセット算出方法を提供する。
【解決手段】校正用治具100は、基準球112と、基準球112を下方から支持し且つ基準球112が上方から照明された場合の光を正反射させる反射板111とを備える。また、校正用治具100は、反射板111上に形成され上面が平面を有する基準ブロック113を備える。基準球112の表面は、鏡面にて構成されている。
(もっと読む)
多面外観検査装置
【課題】被検査物体の6面が隙問なく整列配置され、電子カメラによる撮影面の広がりを最低限度に抑制した、小型コンパクトな多面外観検査装置を提供する。
【解決手段】透明体は観察平面部から入光した光源からの照明光を直交反射して、不透明体である被検査物体の上下左右の周面を照明する4個の斜面と、照明光を2度にわたって直交反射して被検査物体の背面を照明する対向斜面を備え、収納凹部の底面寸法と深さ寸法は被検査物体の外のり寸法が最大である場合の背面寸法と高さ寸法に相当し、少なくとも被検査物体の複数面は収納凹部の内壁に接触するようにして投入され、電子カメラは観察平面部に整列投影された被検査物体の複数面の外観を撮影し、画像処理装置によって被検査物体に外観上の特異性があるかどうかが判定される。
(もっと読む)
非接触側面形状測定装置
【課題】測定ワークの側面形状も測定することができる非接触側面形状測定装置を提供する。
【解決手段】プリズム12により、下向きに照射されたレーザー光LをX軸方向へ反射するため、円筒部材1の中心孔1aの内面形状も測定できる。特に、下端に位置するプリズム12、対物レンズ手段21、第1結像レンズ手段20が固定された構造のため、ヘッド10の小型化が可能である。また、Z軸で移動するコリメータレンズ手段18でオートフォーカスするため、プローブ9を細い径のまま長く形成することができる。従って、円筒部材1の中心孔1a内にヘッド10を奥深くまで挿入して、その内面を形状を測定することができる。Z軸方向での位置を変化させて円周方向の測定を繰り返すことにより、内面の三次元形状の測定も可能となる。
(もっと読む)
被測定物形状測定治具及び三次元形状測定方法
【課題】被測定物の表裏面の三次元測定を高精度かつ高速に行う。
【解決手段】レンズ20と基準球20A,20Bと基準平面30の三次元形状を表面側及び裏面側のいずれ側からでも表裏両面において測定可能な被測定物形状測定治具10を用いて、基準球20A,20Bの中心点座標と、基準平面30の平面の傾きと、レンズ20のR1面及びR2面のそれぞれの頂点座標Pr1,Pr2及び光軸L1,L2の方向を得て、R2面側測定データをY軸回りに180°回転させ、R1面側及びR2面側測定データを、例えば基準球20Aの中心点座標O1が一致するように平行移動させ、R1面に対するR2面の偏心d及び傾きθを求める。
(もっと読む)
101 - 120 / 250
[ Back to top ]