
Fターム[2F065PP04]の内容
光学的手段による測長装置 (194,290) | 装置全体の構造 (6,881) | 検出器の支持、保持関連 (1,622) | 3次元駆動 (250)
Fターム[2F065PP04]に分類される特許
141 - 160 / 250
取付姿勢測定装置

【課題】ヘリオスタット3に取付けられる反射鏡(ファセット31)を擬似的に回転円錐曲線面に合わせる作業を、効率的且つ簡易な取付調整を行うようにする。
【解決手段】太陽光集光用のヘリオスタット3を構成している反射鏡(ファセット31)の取付姿勢測定装置であって、前記ファセット31が形成する擬似的な球面51の中心に設けた画像取得装置12と、該画像取得装置12近傍に設置されたターゲット11と、画像表示装置13とを具備した。
(もっと読む)
測定領域確認装置および測定領域確認方法

【課題】測定現場における測定プログラムの修正等を未然に防ぐ。
【解決手段】要素抽出部12によりファセットが抽出されると、ベクトル算出部13は、そのファセットに対する照射方向ベクトルV1を算出する。角度算出部14は、そのファセット毎に、照射方向ベクトルV1と法線ベクトルV2との角度αを算出する。判定部15は、角度αに基づいて対応するファセットの測定可能性を判定する。
(もっと読む)
オートフォーカス装置、オートフォーカス方法および計測装置
【課題】計測対象の反射率などによらず、フォーカスを合わせて、計測対象の撮影を可能にする。
【解決手段】計測対象である基板2に投影されるパターンを、ビームスプリッタ16で分岐し、ラインセンサ19で検出してオートフォーカスを行うオートフォーカス時と、基板2を、二次元CCDで撮影する撮影時とで、照明用光源11の光源11a〜11cを切り替え選択できるようにし、オートフォーカス時には、投影パターンのコントラストが十分得られるようにする一方、撮影時には、基板2の画像が鮮明に得られるようにしている。
(もっと読む)
3次元形状測定装置
【課題】3次元形状の測定精度をより改善できる3次元形状測定装置を提供すること。
【解決手段】本発明の3次元測定装置は、測定対象物を固定するワークステージと、光源、光源から照射された光を透過させる格子及び格子の格子イメージを測定対象物に結像させる投影レンズを含み、測定対象物に対して格子イメージを第1方向にN回入射した後、測定対象物に格子イメージを第2方向にN’回入射する投影部と(N及びN’は2以上の自然数)、結像レンズ及びカメラを含み、測定対象物によって反射される第1方向反射イメージ及び第2方向反射イメージを受信するイメージ取り込み装置と、イメージ取り込み装置に受信された第1方向反射イメージ及び第2方向反射イメージを用いて測定対象物の影領域を補償して測定対象物の3次元状態を算出する制御部と、を含む。
(もっと読む)
非接触測定を行う装置および方法
対象物体を検査するための非接触法および装置。第1の透視位置から撮った、光学的パターンが投影される前記対象物体の少なくとも1つの第1の画像が得られる。第1の透視位置と異なる第2の透視位置から撮った、光学的パターンが投影される対象物体の少なくとも1つの第2の画像が得られる。次いで、少なくとも1つの第1および第2の画像のそれぞれの中の少なくとも1つの共通の対象物体特徴が、少なくとも1つの第1および第2の画像内に画像化されているような光学的パターンの不規則性に基づいて決定される。 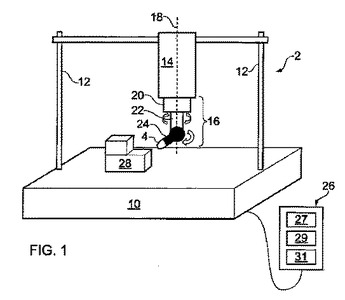 (もっと読む)
(もっと読む)
位相解析測定を行う装置および方法
位相解析を用いて対象物体を検査するための非接触法および装置。プロジェクタは、検査される対象物体の表面上に光学的パターンを投影する。次いで、光学的パターンが投影される表面の少なくとも第1の画像および第2の画像を得る。表面上の光学的パターンの位相は、対象物体に相対的にプロジェクタを移動することによって前記第1の画像と第2の画像との間で変化される。 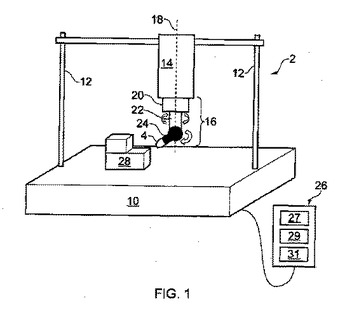 (もっと読む)
(もっと読む)
構造光を使用した土工量算出装置及び方法
掘削機のバケットにより掘削された土工量を3D地盤形状イメージを通じて算出することができ、作業が完了した地域に対する最終土工量を正確に算出することができ、リアルタイムな3次元地盤形状イメージにより最適の土工作業計画システムを開発及び活用することができる、構造光を使用した土工量算出装置及び方法を提供する。
この技術的構成は、掘削機アームの各折曲点に具備されて掘削機アームの位置及び屈折角を感知して出力する制御センサー部と、該制御センサー部の出力により掘削機アームの一側端部に具備されたバケットの作業領域の映像を撮影するように制御信号を出力し、撮影された映像を3次元イメージに変換して土工量を算出するマイクロコントローラーと、前記制御信号により前記作業領域を照査するように光源がオンになる照明モジュールと、前記制御信号により前記作業領域を撮影する構造光モジュールとを含む。  (もっと読む)
(もっと読む)
表面形状測定装置、及び表面形状測定方法
【課題】試料に対する走査光の選択性を向上させる。
【解決手段】表面形状測定装置100は、共焦点光学系と非共焦点光学系とを切換え可能であって、試料101を照明する照明光の波長を切替える波長切替手段17と、非共焦点光学系に切換えられた状態で、照明光から参照光を生成すると共に、照明光を試料に照射させ、その反射光と参照光を合成して干渉光を生成する干渉光学系(干渉型対物レンズ13)と、干渉光学系からの干渉光を受光する光センサ(CCDカメラ36)と、共焦点光学系に切換えた状態において、試料101と共焦点光学系の光学的な距離を変化させる距離変化手段(顕微鏡ステージ1)と、光センサが干渉光を受光したときの測定結果と、距離変化手段によって光学的な距離を変化させたときの測定結果とに基づいて、試料の表面形状を算出する演算処理部(コンピュータ6)と、を有する。
(もっと読む)
表面検査装置及び表面検査方法
【課題】ロボットの数を増やすことなく検査の所要時間短縮を実現する、表面検査装置及び検査方法を提供する。
【解決手段】表面検査装置1は、被検査面への照明手段21とCCDカメラ22とを備えたロボットアーム23と、CCDカメラ22の撮像信号に基づいて被検査面上の欠陥を検出し出力する検査結果出力部3とを備え、所定の検査ルートに沿ってロボットアーム23に照明手段21及びCCDカメラ22を移動させつつ所定の複数の撮像地点で撮像させる動作処理部と、所定の複数の撮像地点の座標データと撮像を行う順番とを格納したデータベース4とを有し、検査結果出力部3は、撮像が行われる順番をキーとして一の撮像信号と一の座標データとを関連付け、この撮像信号が得られた被検査面上の位置を特定する。
(もっと読む)
3次元距離測定装置及び脚車輪型ロボット
【課題】測距センサの駆動機構に阻害されずに走査範囲を走査することが可能な3次元距離測定装置及び当該装置を備えた脚車輪型ロボットを提供する。
【解決手段】3次元距離測定装置200を、2次元距離測定装置112と、モータ116と、エンコーダ118と、プーリ120a及び120bと、ベルト121とを含んだ構成とし、モータ116の第1の回転軸を、プーリ120aの回転軸となるように当該プーリ120aと係合し、モータ116の回転駆動力で、プーリ120aを回転駆動する。プーリ120a及びプーリ120bは、その軸心A及びBの位置が水平方向に所定の距離を開けるように配設し、プーリ120aの回転駆動力は、ベルト121を介してプーリ120bに伝達されるようにした。また、プーリ120bと、2次元距離測定装置112を回転駆動する第2の回転軸とは、当該第2の回転軸がプーリ120bの回転に連動して回転するように係合した。
(もっと読む)
表面状態検査のための情報登録方法および表面状態検査装置
【課題】撮像対象領域の設定を正確かつ効率良く行うとともに、必要以上の撮像が行われるのを防止できるようにする。
【解決手段】ワークWの表面の凹凸欠陥を検査するのに先立ち、毎時の撮像対象領域を定めながら、その領域を撮像するのに必要なカメラ1の位置および撮像方向を設定する。この設定処理では、ワークの表面形状を三角平面の集合体として表したCADデータを用いて被検査面全体の法線方向ヒストグラムを作成し、そのヒストグラムから撮像中心点の法線方向に対する角度差が所定の許容値以内になる平面を抽出することにより、検査可能範囲を認識する。また、検査に必要な強度の反射光の進行方向のばらつきを示す角度を特定し、その角度に基づく値を許容値として設定することにより、検査可能範囲の認識精度を確保する。
(もっと読む)
自動車用開閉体の建付精度評価方法
【課題】インラインでのサイドドアの全数検査が可能であって、ボデイに実際のサイドドアを組み付けることなく、組み立てられた実際のサイドドアの建付精度の評価に同じく実際に生産されたボデイ側のドア開口部の形状を反映させて、ドアの建付精度の評価結果の信頼性向上を図った方法を提供する。
【解決手段】組み立てられたサイドドアDrまたはDf単独の実測データと、同じく組み立てられたボデイ単独での実測データとを、データ処理装置23においてボデイ座標系のドアヒンジ取付穴を基準に互いに突き合わせて、サイドドアのパーティング部での建付精度を演算・解析する。
(もっと読む)
超精密形状測定方法及びその装置
【課題】 放射光施設で用いられる硬X線から軟X線を集光させるため長尺の曲面ミラーを、ナノ若しくはサブナノオーダーの精度で超精密に測定することができ、特に一方向に長い領域における楕円形状や円筒形状のX線ミラーの全体形状を測定できる超精密形状測定方法及びその装置を提供する。
【解決手段】 フィゾー型干渉計で、その参照面の直径よりも長い被測定物の被測定面全体の部分形状データと、隣接する部分形状データ間の相対角度を取得した後、各部分形状データを相対角度と重合領域の一致度を利用してスティッチング処理を施して全体形状を測定すべく、被測定物1と基準平面ミラー3とをフィゾー型干渉計の参照面2に対して略平行に並べるとともに、被測定物を主傾斜ステージ上にXステージを介して保持し、基準平面ミラーを主傾斜ステージ上に設けた副傾斜ステージ上に保持した配置とした。
(もっと読む)
穴位置確認システム
【課題】ワークに形成された穴の実測された位置と設計上の位置とのずれを高精度に測定できる穴位置確認システムを提供すること。
【解決手段】穴位置確認システム1は、ワーク表面を走査し走査線上の複数の点の位置を測定する測定ロボット10と、複数の点を実測点として仮想空間に表現する実測データ仮想化部21と、穴の設計上の位置を設計位置として仮想空間に表現する設計データ仮想化部22と、穴の設計上の大きさに略等しくかつ実測点のうち端部に位置するものに近接する第1の近接円を仮想空間に形成する第1の近接円形成部23と、第1の近接円を中心とする許容範囲を仮想空間に形成する許容範囲形成部24と、許容範囲に含まれる実測点のうち第1の近接円に近接するものに近接する第2の近接円を仮想空間に形成する第2の近接円形成部25と、第2の近接円を実測位置とし、実測位置と設計位置とのずれを算出する位置ずれ算出部26と、を備える。
(もっと読む)
複数のカメラの位置調整装置及び位置調整方法
【課題】LIF法によるエンジン燃焼実験に用いる複数のカメラの位置調整装置を提供する。
【解決手段】複数の透光部を備えるパターンが形成されたプレート100と、パターンにより生成された光パターンを撮影する位置調整自在に支持された複数のカメラ153、154と、それぞれのカメラにより撮影された光パターンの映像からそれぞれのカメラ相互間の位置ズレ量を演算する画像処理装置160と、画像処理装置によって演算されたそれぞれのカメラ相互間の位置ズレ量からそれぞれのカメラを位置調整するカメラ位置制御装置190とを有することを特徴とする。
(もっと読む)
撮像装置、物体検出方法及び姿勢パラメータの算出方法
【課題】従来よりも計算負荷の軽い回転補正を行うことで、処理コストを軽減しつつ、精度良く物体検出する。
【解決手段】撮像装置は、画像を撮像する撮像部と、撮像部の3次元空間における姿勢を表す姿勢パラメータに基づいて、撮像部により撮像された画像に施されることになる回転補正の回転角度を算出する回転角度算出部を含む。また、撮像装置は、撮像部により撮像された画像において、検出対象となる検出対象物体が含まれうる1つ以上の候補領域を抽出する抽出部と、抽出された各候補領域を、算出された回転角度に応じて回転補正する回転補正部を含む。さらに、撮像装置は、回転補正された各候補領域から、検出対象物体を検出する物体検出部を含む。
(もっと読む)
光学式測定装置及び光学式測定方法
【課題】非接触式のプローブを具備することで、穴の内部を短時間で容易に測定することができる光学式測定装置を提供する。
【解決手段】プローブ15の基体16の内部には、3組の測定ユニット20が配置されている。各測定ユニット20は光源としての光ファイバー21、照射孔22、透過部としての反射光導入孔23、集光レンズ24および受光素子(二次元PSD)25とから構成される。そして、プローブ15を被加工物の穴の内部に挿入した状態で光源から光を照射すると、光は穴の内壁面にて乱反射され、散乱光のうち一部の光(反射光)がプローブ15内部に透過されて受光素子25の受光面26上に結像する。この結像点の座標に基づいて穴の内壁面を周面とする仮想円を求めることで、穴の内径を算出する。
(もっと読む)
光学式測定装置及び加工システム
【課題】加工対象を加工しながら、前記加工対象の形状等を光学的に高精度に測定できるようにすること。
【解決手段】金型部品である測定対象4の測定時に、加工用テーブル2及び主軸ヘッド6の少なくとも一方を相対的に移動させ、光学式測定器18は前記移動に同期させながら測定対象4の測定データを出力する。データ処理装置25は、制御部26を介して受信した前記測定データに基づいて測定対象4の形状を表す形状測定データを算出し、前記形状測定データと加工用形状データとの差異が許容値内にあると判断した場合、及び、既に加工済みで測定対象4と組をなす金型部品との組合せ状態が許容値内に入ると判断した場合に良と判断して合格通知を行う。
(もっと読む)
水車構造物の三次元欠陥検査装置
【課題】水車におけるステーベン5の欠陥を高い精度で効率的に求める。
【解決手段】 先端部19の三次元位置と向きとを読取る三次元デジタイザ7の先端部19に距離計8を取付けて、先端部をステーベン5に対する倣い操作を行なうことによって、ステーベンの三次元形状を測定する。次に、三次元デジタイザの先端部に超音波探触子9を取付けて、ステーベンの表面の各位置へ超音波探触子を順次当接していくことによって、ステーベンに対して超音波パルスを送信してエコーを受信する。そして、超音波探触子のステーベンにおける各当接位置、エコー受信情報、及び測定した三次元形状に基づいてステーベンにおける欠陥の3次元位置と欠陥規模とを算出する。算出した三次元欠陥を三次元グラフィック表示する。
(もっと読む)
物体の測定方法及びシステム
物体を測定する方法は、物体を移動可能なステージに位置づける方法と、距離センサーで物体の回転スキャンを行う工程と、回転スキャンに基づいて物体の幾何学的パラメーターを測定する工程と、を含む。 (もっと読む)
141 - 160 / 250
[ Back to top ]