
Fターム[2F065QQ08]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | A/D変換、多値化 (3,603) | 2値化 (1,922) | 閾値の決定、変更 (724)
Fターム[2F065QQ08]に分類される特許
201 - 220 / 724
形状測定装置及びこれを用いた工作機械
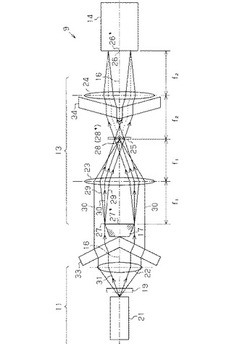
【課題】数値処理可能な鮮明且つ正確なエッジ画像を撮像しつつ、測定する工具の両端のエッジの位置関係を正確に測定する形状測定装置を提供する。
【解決手段】本発明の形状測定装置9は、平行光を発する光源モジュール11と、光源モジュール11の発する平行光の光軸16に沿って配置された対物レンズ23と、対物レンズと共焦点を有する投影レンズ24と、この共焦点に配置され入射光のうちの0次光の光線を遮光するアンチピンホールフィルタ25とを備えた投影光学系を備えたレンズ鏡筒13と、光軸16を含む基準面に対して対称に、光束の方向を変えずに平行移動させて離間させる光線分離器33と、結合させる光線結合器34とを備えた光路シフト手段と、投影光学系により投影された映像を撮像するように撮像素子を備え、大型のワーク17であっても正確な形状を測定することができる。
(もっと読む)
変位計測装置、方法およびプログラム

【課題】所定の位置における微小な変位を高精度かつ高効率で自動的に計測する装置、方法およびプログラムを提供する。
【解決手段】変位計測装置は、所定の位置に設けられた変位計測用の格子を含む変位計測用画像を撮影する撮影部と、変位計測用画像から格子の領域を検出して該格子領域の画像を抽出する格子領域検出部と、抽出した格子領域の画像に対してサンプリングモアレ法により格子領域の画像に対するモアレの位相分布を導出する位相分布導出部と、位相分布から求められた所定の位置における変位前後の位相差と、予め定められた格子ピッチとから所定の位置における変位を決定する変位決定部とを備える。
(もっと読む)
表面計測方法及び装置
【課題】計測対象物の平面部と凹部とを正確に分離可能な表面計測装置を実現する。
【解決手段】計測点読取処理110が読み取った計測点データは範囲外点排除処理111で範囲外データが排除される。最頻点抽出処理112は抽出した計測点データから最小二乗法で直線を作成し計測点と直線との差を作成する。ヒストグラムを作成し第1の閾値と平均値を算出し閾値と平均値とが同一とみなせるかどうかを判定する。同一ではない場合、閾値以下の計測データを排除し、直線近似から再処理を行い、閾値と平均値とを再度算出する。算出した閾値と平均値とが同一とみなせるまで処理を繰り返し実行する。
(もっと読む)
画像測定機
【課題】被測定物の三次元形状測定を可能とする画像測定機を提供する。
【解決手段】テーブル1と、撮像光学部10と、これらを相対移動させる相対移動機構50とを有する画像測定機において、撮像光学部10は、前側レンズ12、後側レンズ13およびテレセントリック絞り14を有するテレセントリック光学系11と、このテレセントリック光学系11によって結像された被測定物の画像を撮像するCCDカメラ15とを含んで構成され、レーザ光を用いて、テレセントリック光学系11の光軸上における被測定物表面の光軸方向の位置を非接触で測定するオートフォーカスレーザ変位計部20とを備える。
(もっと読む)
位置検出装置および位置検出方法
【課題】撮像面と撮像対象との位置関係を測定または判定する。
【解決手段】データ表示/センサ装置100は、入力表示画面およびバックライトを有する表示/光センサ部と、入力表示画面に照明光を照射する外部照明部とを備えている。表示/光センサ部は、バックライトからの照明光が撮像対象に反射することによって生じる反射像を含む反射光画像と、外部照明部からの照明光によって生じる撮像対象の影の像を含む影画像とを撮像する。また、データ表示/センサ装置100は、撮像対象から入力表示画面に下ろした垂線の足の位置である反射像位置を反射光画像から算出する反射像位置算出部705と、入力表示画面における上記影の位置を影画像から算出する影像位置算出部706と、反射像位置と影の位置とのずれに基づいて撮像対象の入力表示画面からの距離を算出する距離算出部802とを備えている。
(もっと読む)
検出装置及び検出方法
【課題】検出対象を精度良く検出すること。
【解決手段】検出装置であって、所定の高さから下方に向けて設置されたセンサによって測定された各観測点の位置情報から、検出処理で使用する検出用位置情報を、高さの値に基づいて選択する選択部と、検出対象の形状に基づいて設定された検出対象特徴量を予め記憶する記憶部と、選択された検出用位置情報と、記憶部に記憶される検出対象特徴量とに基づいて、検出用位置情報から検出対象を検出する検出部と、を備える。
(もっと読む)
検査方法
【課題】数十μmから百数十μm程度の孔径の孔においても正確な検査が実施できる検査方法を提供する。
【解決手段】検査方法は、孔基板に形成された孔の状態を検査する検査方法であって、孔基板における第一の面の方向から撮影した孔の孔画像を取得する画像取得工程と、孔画像から孔の状態を判定する状態判定工程と、を有し、状態判定工程は、孔画像における孔基板の第一の面と反対側の第二の面から孔の壁面にかけて形成された膜の端面の部分の端面画像から、端面の位置である膜端位置を取得する膜端位置取得工程と、膜端位置によって膜の第二の面からの入り込み量を判定する入り込み量判定工程と、を有す。
(もっと読む)
表示端末装置及び表示端末装置の表示制御方法
【課題】簡単な構成で筐体の姿勢を速やかに判定でき、その姿勢に応じて画像の表示態様を変えることができる表示端末装置及び表示端末装置の表示制御方法を提供する。
【解決手段】表示端末装置1において、第1光センサ21は、正面5の開口16から正面5に対して直交して入射する光を入光路17を介して受光する。第2光センサ22は、正面5の開口16から正面5に対して斜めに入射する光を入光路18を介して受光する。第1光センサ21及び第2光センサ22における受光強度を、人工光と自然光とに分けてそれぞれで比較する。これにより、周囲の照明状況に応じて筐体2の姿勢を判定できる。判定された姿勢に応じて、ディスプレイ15における画像の表示態様を制御する。
(もっと読む)
欠陥検査方法及びその装置
【課題】
エッチング完了後の溝底ショート欠陥やスクラッチを検出するための高仰角照明による暗視野欠陥検出方法において、レンズ反射光などの迷光が像面に到達することによる検査感度を阻害することを防止する。
【解決手段】
欠陥検査装置を、本来同一の形状となるべきパターンが繰り返して形成された試料上の異なる領域に異なる光学条件で同時に照明光を照射する照射手段と、照明光を照射した領域からの反射光を異なる領域ごとに検出する検出手段と、検出した反射光の検出信号を処理して異なる領域ごとに異なる光学条件の元での欠陥候補を抽出する欠陥候補抽出手段と、異なる光学条件の元で抽出した欠陥候補を統合して欠陥を抽出する欠陥抽出手段と、抽出した欠陥の特徴量を求めて該求めた特徴量に基づいて前記欠陥を分類する欠陥分類手段とを備えて構成した。
(もっと読む)
物体形状評価装置
【課題】誤測定しやすい測定領域が存在する測定対象物であっても、物体形状評価が適正に行われる物体形状評価装置を提供することである。
【解決手段】物体形状評価装置は、対応する測定点と基準点との間の距離を逐次収束させる逐次収束処理に基づいて測定点と基準点とを位置合わせする位置合わせ処理手段50と、位置合わせ処理後の前記測定点データと前記基準点データとに基づいて前記測定対象物の形状を評価する形状評価手段6とを備えている。位置合わせ処理手段50は、測定点データから測定対象物のエッジに対応するエッジ点を検出するエッジ検出部によって生成されたエッジ点群と、エッジ基準点群とを位置合わせするエッジ位置合わせを行い、当該エッジ位置合わせによって得られたエッジ合同変換パラメータを用いて測定点データ全体の測定点が基準点に向かう位置合わせを行う。
(もっと読む)
物体認識方法及び物体認識装置
【課題】予め登録しておくモデルデータのデータ量を抑制しながら、対象物の位置や姿勢を迅速に求めることができる物体認識方法及び物体認識装置を提供する。
【解決手段】距離センサ1により、対象物201を含む所定領域内の各点までの距離計測を行い、三次元物体認識手段3により、これら各点の計測データをメッシュデータ化し、このメッシュデータのグルーピングを行って複数のメッシュグループとし、各メッシュグループの法線ベクトルに垂直な投影平面を作成し、各メッシュグループを対応する投影平面に投影した投影データを求め、投影データの輪郭データを抽出して、輪郭データと対象物の二次元形状データとを比較して、対象物の位置及び姿勢を認識する。
(もっと読む)
マシンビジョン検査システム用の光学収差補正
【課題】 マシンビジョン検査システム用の光学収差補正を提供する。
【解決手段】 光学収差に対して表面高さ測定値を補正するためのシステムおよび方法が提供される。オートフォーカスツールによって決定される高さは、焦点関心領域(ROI)における表面特徴角度および視野におけるROI箇所に依存し得るが、新しい誤差校正に基づいて補正される。誤差校正データには、画像における異なる特徴角度用の、および視野における複数の箇所用の高さ補正値が含まれる。高さ補正値は、例えばROIにおいて決定された勾配(エッジ)角度分布に基づき、角度依存性の誤差校正データを重み付けし、組み合わせることによって決定される。視野における複数のROI用にZ高さが決定されると、グローバル画像スタックの特定の画像からの画像データの記憶は、特定の画像が、十分に合焦された「近ピーク」焦点画像であるかどうかを、処理の初期に決定することに基づいて、効率的に制御することが可能である。
(もっと読む)
撮像装置、車載用撮像システム、路面外観認識方法及び物体識別装置
【課題】撮影環境によらずに簡易な構成で走行路面の境界を正確に検出することができ、安全な運転のための運転者への視認表示や車両制御への的確な情報を提供し得る撮像装置を提供する。
【解決手段】偏光カメラによって撮影した路面の垂直偏光画像と水平偏光画像とから偏光比を算出して偏光比画像を生成する。偏光カメラで撮影した画像の輝度情報に基づいて白線WLを検出し、内側のそれぞれの偏光比(走査用基準偏光比)を使って、1走査線ごとに画面の下から画面の上まで中央から左、右方向へ同じ走査線にある偏光比との差分を算出し、予め設定された閾値と比較することで、路端REを検出する。差分値が閾値以内の部分は×で表示し、閾値より大きい部分は黒丸で表示している。黒丸部分は路端REとして認識されたところである。
(もっと読む)
障害物検知警報装置
【課題】事前校正を必要とせずに路面と障害物とを識別することができる障害物検知警報装置を提供する。
【解決手段】車載カメラ1による撮像画像に基づいて、撮像画像の各画素に、2次元座標と各画素に対応する被写体の部分から車載カメラ1までの距離とを対応付け、2次元座標と距離とからなる距離マップを作成する距離マップ作成手段6と、距離マップに基づいて、被写体の部分のうち路面に相当する平面Gを特定する路面特定手段7と、を有することにより、路面に相当する平面Gは、従来のように予め用意された3次元位置が既知の多数点から特定されるわけではなく、撮像画像に基づいて特定されるため、従来のような事前校正を必要とせずに路面と障害物とを識別することができる。
(もっと読む)
電子機器および制御方法
【課題】近接する物体の検出精度の向上を図ることが出来る電子機器を実現する。
【解決手段】検出距離チューニングプログラム200aによるチューニング処理は、本コンピュータ10の前にユーザが実際に存在している状態で実行される。このチューニング処理では、検出距離チューニングプログラム200aは、近接センサ25から放出される光の強度を変化させながら近接センサ25の出力信号を監視する。そして、検出距離チューニングプログラム200aは、この監視結果に基づいて、放出される光の強度を、現在のコンピュータ10とユーザとの間の距離に適した値に調整する。
(もっと読む)
照明灯検出方法
【課題】駅構内等の天井部等に設置された多数の照明灯の撮影画像に基づき各々の存在を正確に検出し、照明灯の自動清掃システムを実現できる照明灯検出方法を提供する。
【解決手段】この照明灯検出方法は、照明灯を可視光カメラ22によって撮影し画像データを得るステップS11と、二次元画像領域で任意な線33を設定し線上の複数画素に係る画像データを取り出し、画像データの中から輝度極大値に係る画素を検出し、この画素を初期検索位置に設定するステップS12と、初期検索位置を基準とし、検索範囲を設定し、画像データから照明灯候補の画素を検出するステップS13と、擬似形状画素を算出し、この擬似形状画素による擬似形状と照明灯候補画素とを比較して照明灯であるか否かを判断するステップS14を有する。
(もっと読む)
回折格子の形状誤差評価方法
【課題】回折格子回折格子全面からの回折光波面を短時間に計測し、得られた波面情報に演算処理を施すことで、従来技術が持つコストと評価時間に関する課題を解決することを目的としている。
【解決手段】1軸回折格子10または2軸回折格子の全面に光を照射し、+1次回折光と−1次回折光のそれぞれの波面情報をフィゾー型干渉計11などの形状計測用干渉計で評価する。回折格子からの+1次回折光または−1次回折光と、フィゾー型干渉計12の内部に搭載されている参照用オプティカルフラット12からの参照光が重なり合うように、形状計測用干渉計に対して回折格子を相対的に傾ける。フィゾー型干渉計12により、回折光全面からの波面を一括に、且つ短時間に計測できる。得られた+1次回折光または−1次回折光の波面を減算処理することで、回折格子全面にわたるピッチばらつきを求めることができる。
(もっと読む)
照明灯の三次元位置測定方法
【課題】駅構内等の天井部等に設置された多数の照明灯をカメラで撮影し、その画像に基づき多数の照明灯の各々の存在を検出し、その設置位置を三次元的に正確に測定し、照明灯の自動清掃システムを実現する照明灯の三次元位置測定方法を提供する。
【解決手段】本発明に係る照明灯の三次元位置測定方法は、測定対象となる照明灯11を検出する第1ステップS10と、検出した照明灯の三次元位置を測定する第2ステップとS20、その他の複数の照明灯について、測定対象となる照明灯が存在しなくなるまで第1ステップと第2ステップを繰り返す第3ステップS30とからなる方法である。
(もっと読む)
タイヤ形状検査方法、及びタイヤ形状検査装置
【課題】凹凸マーク上に重なるように凹凸欠陥が存在する場合にも、本来の凹凸マークの高さ分だけを差し引いて凹凸欠陥のみの高さを算出・取得する。
【解決手段】サンプルタイヤのサイドウォール面の二次元画像であるサンプル原画像において、凹凸マークの輪郭である境界線を検出し、境界線の位置を示すマスク画像を生成するマスク画像生成工程と、サンプル原画像において、マスク画像に示された境界線の位置に対応する領域を除き、残りの領域の高さを離散的な複数の高さ閾値を用いて分類することで得られる高さオフセット画像を生成する高さオフセット画像生成工程と、検査タイヤのサイドウォール面の二次元画像である検査画像から、高さオフセット画像を差し引くと共に、マスク画像が表す境界領域を除去する差分処理工程とを経て、差分処理工程の結果として得られた凹凸除去画像に基づいて、検査タイヤのサイドウォール面の形状欠陥を検査する。
(もっと読む)
近接度検出器
【課題】光源(1)と、光源(1)により照明されるときに基準物から生じる後方散乱光を受光するための光検出器(3)とを備え、光検出器(3)への後方散乱される光の強度を近接度の尺度として利用することにより、第1の物体(目標物)と第2の物体(基準物)との間の近接度を検出するための装置を提供する。
【解決手段】目標物(2)は、焦点面(7)を有し光源(1)により照明される光学デバイス(4)を含む。光源(1)からの光線の軸と光検出器(3)への後方散乱による光線の軸とは互いに非常に接近し、ほぼ平行又は一致する部分を有する。近接度は目標物(2)と、ほぼ焦点面に位置する基準物(6,8)との間の間隔(相対位置)に相当する。
(もっと読む)
201 - 220 / 724
[ Back to top ]