
Fターム[2F065QQ14]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 信号の積分 (316)
Fターム[2F065QQ14]の下位に属するFターム
移動平均 (66)
Fターム[2F065QQ14]に分類される特許
21 - 40 / 250
測定装置
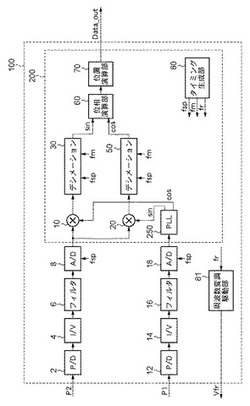
【課題】測定対象物の位置を高精度に測定する測定装置を低コストで提供する。
【解決手段】変調部によって第1周波数で変調された基準光からデジタル基準信号を取得し、前記第1周波数で変調された光が照射された測定対象物から反射された測定光からデジタル測定信号を取得し、前記デジタル基準信号と前記デジタル測定信号とを処理して前記測定対象物の位置を測定する装置は、前記デジタル測定信号に前記デジタル基準信号と同期したサイン信号又はコサイン信号を乗算して、第2周波数および高調波の成分を有する信号をそれぞれ出力する第1および第2同期検波部と、前記第1又は第2同期検波部から出力された信号をデシメーション周波数でフィルタリングして前記高調波の成分を減衰させる第1および第2デシメーションフィルタと、前記第1および第2デシメーションフィルタから出力された信号に基づいて前記測定対象物の位置を演算する演算部とを備える。
(もっと読む)
形状測定システム及び形状測定方法

【課題】スキャナを用いた形状測定システムにおいて、いわゆる手振れによる測定誤差を低減することをその目的とする。
【解決手段】形状測定システム1は、多関節アームの先端に取り付けられ、測定対象Aに対し手動で移動可能であり、測定対象Aに対しレーザ光を照射しその反射光を、光センサ61の複数の受光ラインで順次検出するスキャナ21と、スキャナ21の手振れ情報を光センサ61の受光ライン毎に取得する加速度センサ42と、各受光ラインのスキャナ21の手振れ情報に基づいて、受光ライン毎に画像の位置情報を補正する手振れ補正部80と、スキャナ21の画像情報と手振れ補正部80で補正された画像の位置情報に基づいて、測定対象Aの画像を生成する画像生成部100と、を有する。
(もっと読む)
欠陥レビュー装置及び欠陥レビュー方法
【課題】迅速に欠陥レビューを行うことができる欠陥レビュー装置及び欠陥レビュー方法を提供する。
【解決手段】電子ビーム31を試料8の表面に照射し、試料8の表面の観察領域内で電子ビーム31を走査させる電子鏡筒1と、電子ビーム31の光軸周りに相互に90°の角度を開けて配置された4つの電子検出器9a〜9dと、電子検出器9a〜9dの検出信号に基づいて、観察領域をそれぞれ異なる方向から写した複数の画像データを生成する信号処理部11とを備えた欠陥レビュー装置100において、観察領域のパターンがラインアンドスペースパターンである場合には、欠陥検査部12によってラインパターンに平行であって電子ビーム31を挟んで対抗する2方向からの画像データの差分をとった差分画像に基づいて、欠陥の検出を行う。
(もっと読む)
表面評価装置
【課題】ワーク表面の凹凸状態をパワースペクトルの全座標点データを用いて定量的に評価することができる表面評価装置を提供する。
【解決手段】ワーク表面の凹凸データに基づいてワーク表面を評価する表面評価装置10において、前記ワーク表面の凹凸データをフーリエ変換してパワースペクトルを求める手段と、当該パワースペクトルを相互相関関数を用いて数値化する手段と、当該数値化された値の最大値を用いて前記ワーク表面の評価を行う手段と、を有する。
(もっと読む)
形状測定装置、形状測定制御プログラム及び形状測定方法
【課題】テーブル等の移動に伴う誤差を排除することができ、被測定物の形状を高精度に測定可能な手段を提供する。
【解決手段】形状測定装置LMSは、被測定物Wと第1、第2プローブ光とを相体移動させるワーク移動ユニット10及びミラーユニット30と、被測定物Wの測定面に照射位置が所定間隔離れた第1,第2プローブ光を照射するとともに、反射光の位置に応じた第1,第2受光信号を出力する光学入ニット20と、これらの作動を制御する制御ユニット50とを備える。制御ユニット50は、測定面の測定部位を測定ラインに沿って前記所定間隔と同程度離間した位置に順次移動させ、各測定部位ごとに第1、第2プローブ光の照射位置の傾斜角度を算出させ、算出された複数の測定部位の傾斜角度情報に基づいて測定ラインに沿った測定面の形状を導出するように構成される。
(もっと読む)
欠陥寸法測定装置、欠陥寸法測定方法、及びプログラム
【課題】撮像装置の光軸方向に対して高低差がある検査対象の欠陥の寸法を正確に測定する。
【解決手段】平面座標取得部302は、画像データに含まれる検査対象の欠陥を示す画素の平面座標を取得する。空間座標変換部305は、平面座標取得部302が取得した平面座標を、仮想空間に配置された検査対象の外観を表す3次元モデルの表面と平面座標が示す点に対応する仮想空間上の直線との交点を示す空間座標に変換する。仮想寸法算出部307は、空間座標変換部305が変換した複数の空間座標を用いて仮想空間における前記欠陥の寸法を算出する。
(もっと読む)
平面形状の測定方法
【課題】適切な平滑化スプライン曲面を高速、かつ短時間で算出する。
【解決手段】3次元スキャナーからなるデータ値計測装置1と、サンプリング測度演算器4、平滑化演算器5および画像処理器6をそなえる計算機2と、処理した画像を表示する出力装置3を有する平面形状測定装置を用いて、被検体表面の平面形状を測定するに際し、平滑化演算器において、座標系(x,y)上に任意に分布するm個のサンプリング点と、各サンプリング点に対応した誤差を含むデータ値から曲面を求めるために平滑化スプライン法を用いるものとし、その際、ハット行列において逆行列計算の必要がない汎関数を極小化する曲面f(x,y)を回帰曲面とする。
(もっと読む)
形状測定装置
【課題】精度の高い測定結果を得る。
【解決手段】広帯域スペクトルを有する光源からの光を被測定対象と参照面とに導きその光路長差により干渉光強度分布画像を生成する光学系と、干渉光強度分布画像を撮像する撮像手段と、光路長差を変化させる光路長差変更手段と、干渉光強度分布画像から各測定位置における光軸方向の位置を求める演算手段とを備える。演算手段は、複数の信号発生手段と、その出力信号に重み付けをして出力する重み付け手段と、周期信号を加算して検出信号として出力する第1の信号加算手段と、直流信号と検出信号とを加算する第2の信号加算手段と、干渉強度列から第2の信号加算手段の出力を減算して誤差信号を出力する信号減算手段と、誤差信号から重み付け手段の重みを調整する適応アルゴリズム部とを有する適応信号処理ブロックと、検出信号のピーク位置を検出するピーク検出ブロックとを有する。
(もっと読む)
表面形状の評価方法および評価装置
【課題】第1表面に対向する第2表面による反射像の影響を受けずに被評価物体の表面形状を精度よく評価することができるようにする。
【解決手段】評価装置は、評価対象である板ガラスなどの被評価物体3の表面3aに映し出されたストライプパターン1を、CCDカメラ2によって撮像するように構成されている。ストライプパターン1は、光源の発光面に設けられている。また、被評価物体3の裏面3bには、屈折率が被評価物体3の屈折率に近い反射抑制層20が、裏面3bに接するように配置されている。CCDカメラ2によって撮像された画像は、演算装置としてのコンピュータ4に取り込まれ、コンピュータ4によって画像解析が行われる。
(もっと読む)
計測装置及び計測方法
【課題】高精度な面形状計測に有利な面形状計測装置を提供する。
【解決手段】計測装置は、基準点を通過し被検面で反射し基準点に戻る被検光と参照光との干渉波を検出する検出器を含む計測ヘッドと、計測ヘッドを走査する走査機構と、検出された干渉波に基づき被検面の形状を算出する処理部とを備える。処理部は、検出された干渉波から参照光と被検光との間の光路長差を算出し、被検面の形状のノミナル値と計測ヘッド内の光学部品の光学情報とに基づき、検出器における被検光の被検波面及び参照光の参照波面を光学演算により算出し、算出した被検波面及び参照波面から被検光と参照光との間の波面差を算出し、当該波面差から該波面差による位相誤差を算出し、算出した光路長差を算出した位相誤差に基づき補正し、当該光路長差に基づき基準点と被検面との間の距離を算出し、算出した基準点と被検面との間の距離と基準点の座標とに基づき被検面の形状を算出する。
(もっと読む)
シートに塗工された塗工パターンの形状測定方法及び装置
【課題】塗工パターンの幅方向および搬送方向の測定の同時性を実現し、光軸方向の距離変動の影響も無くすことができる塗工パターンの測定方法及び装置を提供する。
【解決手段】 シートに塗工された塗工パターンの形状測定方法において、
1)シートの搬送方向に直交して水平ラインの撮影方向に複数のカメラを並べ、前記シートを前記複数のカメラで撮影する工程、
2)撮影した映像の水平走査信号または垂直走査信号の少なくとも一方を水平走査に同期させ前記複数のカメラの水平走査信号を順次切り替えて画像処理手段に取り込む工程を含んでいる。
(もっと読む)
欠陥検査装置
【課題】本発明は、スリットレーザ光等を、回転体状の測定対象に照射し、測定対象からの反射光を撮影した二次元画像に基づいて、回転体状かつ表面が高い反射率を有する測定対象の欠陥を高精度に検出する欠陥検査装置を実現することを目的とする。
【解決手段】本発明は、回転または直線移動する測定対象にスリット光を照射する光源と、前記測定対象からの反射光を受光してその二次元画像を出力する受光部と、前記二次元画像に基づいて、前記反射光がそのスリット幅に相当する領域以外の領域に現れるか否かによって、前記測定対象の欠陥を検出する欠陥検出手段と、を備えることを特徴とする。
(もっと読む)
処理装置、光学式検出装置、表示装置及び電子機器
【課題】対象物の反射率の影響などを低減して精度の高い検出ができる処理装置、光学式検出装置、表示装置及び電子機器等を提供すること。
【解決手段】処理装置100は、第1、第2の光源部LS1、LS2からの照射光LT1、LT2が対象物OBに反射されることによる反射光LR1、LR2を受光する受光部RUの受光結果に基づいて、第1、第2の光源部LS1、LS2の発光制御を行う制御部110と、発光制御を行うための発光電流制御情報に基づいて、第1、第2の光源部LS1、LS2に対する対象物OBの位置関係を判定する判定部120とを含む。判定部120は、対象物OBが検出領域に存在しない第1の期間での発光電流制御情報である第1期間用発光電流制御情報LCNinitと、対象物OBが検出領域に存在する第2の期間での発光電流制御情報である第2期間用発光電流制御情報LCNdetとに基づいて、対象物OBの位置関係を判定する。
(もっと読む)
検査装置及び検査方法
【課題】位相シフト法で立体形状を測定して行う被検査物の検査が低ノイズで効率良く行えるようにする。
【解決手段】通常状態で撮影を行う(ステップS11)と共に、位相シフト法で立体形状を測定するために、格子縞を投光させた状態で撮影を行う(ステップS12)。撮影して得た二次元画像から、被測定物の検査領域を特定する(ステップS14)。そして、格子縞が投光された二次元画像から、特定した検査領域について立体形状を測定して、立体形状検査を行う(ステップS15)。
(もっと読む)
形状計測装置
【課題】自公転する回転台の上に置かれた被測定物の形状を精度良く測定することができる形状計測装置を提供する。
【解決手段】形状計測装置1は、回転台と、変位計測器3と、被測定物検出器4と、演算処理部5とを備え、演算処理部5は、高さ変位から、被測定物通過情報に基づいて、被測定物の高さ変位を抽出する被測定物変位抽出部6と、被測定物通過情報と、変位計測器3による被測定物上の計測点の軌道と、被測定物通過情報に基づく経過時間とに基づいて、変位計測器3による被測定物上の計測点を表す座標値を供給する座標供給部7と、被測定物変位抽出部6により抽出された被測定物の高さ変位と、座標供給部7により供給される座標値とを対応付けて記録する座標変位記録部8と、座標変位記録部9によって記録された被測定物の高さ変位から、回転台の機構に起因する回転台変位を分離して被測定物の形状を演算する形状演算部9とを含む。
(もっと読む)
形状計測装置およびキャリブレーション方法
【課題】計測点の位置の違いによる法線算出の誤差を可及的に小さくし、計測対象物の3次元形状を精度良く算出するための技術を提供する。
【解決手段】形状計測装置は、カメラ1で撮像を行うことにより得られた画像から、計測対象物4の表面上の複数の注目点について特徴量を算出し、記憶装置62に予め記憶されているデータを参照して特徴量の値から法線の向きを算出し、その算出結果から計測対象物4の表面の3次元形状を復元する。ここで、記憶装置62は、カメラ1の視野内に設定された複数の基準位置のそれぞれについて作成された複数のデータを記憶しており、注目点の位置に応じて参照するデータが切り替えられる。
(もっと読む)
オブジェクト検出装置、オブジェクト検出方法、オブジェクト検出プログラム、およびロボット
【課題】画像中のオブジェクトの位置および回転角度の検出時間を削減する。
【解決手段】参照オブジェクトモデルを用いた投票により画像からオブジェクトを検出するオブジェクト検出装置において、オブジェクトモデルの代表点を中心としてオブジェクトモデルを所定の角度ずつ回転して得られる回転オブジェクトモデルそれぞれの特徴点の座標値を参照オブジェクトモデルとして記憶する記憶部20と、画像の輪郭を抽出する輪郭抽出部33と、記憶部20から読み出した前記参照オブジェクトモデルの座標値と、前記画像の輪郭における点の座標値と、に基づき算出した座標値に対して投票を行ってその積算値である投票数を算出する投票数算出部36と、算出した座標値から、投票数が所定の閾値を超える算出した座標値を抽出する位置抽出部37と、を備える。
(もっと読む)
風景画像認識を用いた自車位置検出システム
【課題】風景画像認識技術を用いながらも、効率的な自車位置検出が可能な自車位置検出システムを提供する。
【解決手段】車両からの風景を撮影した撮影画像から画像特徴点を抽出することによって生成された画像特徴点データに対応撮影画像の撮影位置を関係付けた参照データ群を格納している参照データベースベース92と、道路形状情報から推定自車位置における道路形状を判断し、当該道路形状と類似する道路形状が続く類似道路形状範囲を算定する道路形状評価部と、実撮影画像から抽出された画像特徴点からなるマッチング用データのマッチング相手としての参照データを参照データベースベース92から抽出する際に類似道路形状範囲を用いて参照データを決定する抽出参照データ決定部と、マッチングした参照データに関係付けられた撮影位置に基づいて自車位置を決定する自車位置決定部が備えられている。
(もっと読む)
干渉型光ファイバーセンサーシステムおよび演算器
【課題】ダイナミックレンジの広い演算器が不要な干渉型光ファイバーセンサーシステムを提供する。
【解決手段】物理量を検知するセンシングファイバー11aおよびリファレンスファイバーを有する干渉計と、前記物理量の測定信号3を含む干渉光32aを、電気信号に変換するO/E変換器33と、前記電気信号から、正弦波成分および余弦波成分を抽出するAM復調器51a、51bと、該正弦波成分および該余弦波成分を用いて逆正接演算を行い、前記測定信号を含む信号を出力する逆正接演算器53と、前記逆正接演算器から出力された信号の所定時間毎の差分を算出し、該差分信号を出力する差分器61と、を備える。
(もっと読む)
半導体ウェハの表面検査システム及び表面検査方法
【課題】半導体ウェハ表面に存在するソーマークなどの線状の凹凸について、短時間かつ容易に検査が可能であり、検査に対する振動の影響を低減できる技術を提供する。
【解決手段】半導体ウェハWの表面の全域に光源装置2によって斜め方向から光を照射し、CCDカメラ4で半導体ウェハW全体を撮影する。これにより、半導体ウェハWの各ポイントからの前記照射光の反射光または散乱光の強度を検出する。取得された光の2次元的な強度分布に基づいて、半導体ウェハWの表面に生成されたソーマークなどの凹凸を検出し、またはその大きさを測定する。
(もっと読む)
21 - 40 / 250
[ Back to top ]