
Fターム[2F065QQ14]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 信号の積分 (316)
Fターム[2F065QQ14]の下位に属するFターム
移動平均 (66)
Fターム[2F065QQ14]に分類される特許
41 - 60 / 250
超電導線材の検査装置および検査方法
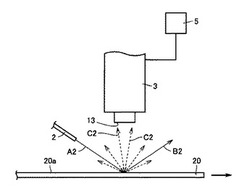
【課題】超電導線材の欠陥を感度よく検査する
【解決手段】超電導線材の検査装置は、超電導線材(20)の表面(20a)の法線方向に光を照射する青色LED(1)と、超電導線材(20)の表面(20a)の法線方向と角度をなす方向に光を照射する赤色LED(2)と、超電導線材(20)からの反射光(B1)を主として受光し、かつ超電導線材(20)からの散乱光(C2)を主として受光するカラーラインセンサ(3)と、カラーラインセンサ(3)にて受光した光の光量を積算して出力するコンピュータ(5)とを備えている。
(もっと読む)
パターン評価方法及びパターン評価装置

【課題】SEM画像を利用したパターン計測において、計測対象のパターンに比較的大きな欠陥が含まれている場合でも、基準パターンとのマッチングを高精度に実施することができるパターン評価方法及びパターン評価装置。
【解決手段】基準パターン画像及び計測対象パターン画像から、各パターンの輪郭線を抽出し、抽出した各パターンの輪郭線からパターンのコーナー部分や欠陥部分などに相当するノイズ領域を除去してパターンマッチング用輪郭線を生成する。続いて、基準パターンのパターンマッチング用輪郭線と、計測対象パターンのパターンマッチング用輪郭線とのマッチングを行い、マッチングした位置で元の輪郭線同士を重ね合わせ表示する。そして、その重ね合わせ画像から、基準パターンと計測対象パターンとの差分を計測する。
(もっと読む)
リソグラフィ用の検査
変位計測装置、方法およびプログラム
【課題】所定の位置における微小な変位を高精度かつ高効率で自動的に計測する装置、方法およびプログラムを提供する。
【解決手段】変位計測装置は、所定の位置に設けられた変位計測用の格子を含む変位計測用画像を撮影する撮影部と、変位計測用画像から格子の領域を検出して該格子領域の画像を抽出する格子領域検出部と、抽出した格子領域の画像に対してサンプリングモアレ法により格子領域の画像に対するモアレの位相分布を導出する位相分布導出部と、位相分布から求められた所定の位置における変位前後の位相差と、予め定められた格子ピッチとから所定の位置における変位を決定する変位決定部とを備える。
(もっと読む)
光ファイバセンサを備えた構造物のたわみ量の算定方法および装置
【課題】工事進捗に応じた構造物のたわみ量を算定することができる光ファイバセンサを備えた構造物のたわみ量の算定方法および装置を提供する。
【解決手段】構造物の上側のひずみと下側のひずみとを光ファイバセンサで計測し、光ファイバセンサで計測した上側のひずみと下側ひずみとの差を構造物の上下方向の高さで除算してたわみ量を規定するたわみ曲率を求め、たわみ曲率を構造物の水平方向に関して2回積分して任意の積分定数を含む数式からなる基本たわみ量を求め、基本たわみ量に対して構造物の所定の工事進捗における境界条件を適用して積分定数の値を決定し、決定した積分定数の値が代入された基本たわみ量に基づいて構造物の所定の工事進捗におけるたわみ量を算定するようにする。
(もっと読む)
位相情報の解析方法、該位相情報の解析プログラム、記憶媒体、X線位相イメージング装置
【課題】窓フーリエ変換法を用いた解析において、解像度の更なる向上を図ることが可能となる位相情報の解析方法等を提供する。
【解決手段】光あるいはX線を含む波長の波の干渉によるモアレ像の周期的パターンを解析し、位相波面を含む位相情報を取得する位相情報の解析方法であって、
前記モアレ像の周期的なパターンの少なくとも一部を、窓関数によって窓フーリエ変換する工程と、
前記窓フーリエ変換されたモアレ像における、位相情報を担うスペクトルの情報と、前記位相情報を担うスペクトルの情報に重畳している位相情報を担っていないスペクトルの情報とを解析的に計算する工程と、
前記位相情報を担っていないスペクトルの情報を、前記位相情報を担うスペクトルの情報から分離し、前記位相波面を含む位相情報を取得する工程と、を有する構成とする。
(もっと読む)
形状測定装置および形状測定方法
【課題】1種類の投影パターンを用いた簡便な方法で被検物の三次元形状を測定することができる形状測定装置を提供する。
【解決手段】形状測定装置1は、被検物5の一部の領域に縞パターンを投影するパターン投影部10と、被検物5に投影された縞パターンを撮像する撮像部20と、縞パターンの画像において、画像表面を通る所定の直線上での画像のコントラスト分布を算出し、そのコントラスト分布に基づいて前記所定の直線上におけるパターン投影領域の中心位置を算出し、前記所定の直線を画像表面に沿って移動させつつ前記中心位置の算出を行って取得した各々の前記中心位置に基づいて被検物5の断面形状を算出するコンピュータ40とを備えることを特徴とする。
(もっと読む)
画像処理方法、画像処理装置、プログラムおよび記録媒体
【課題】 タイヤの種類、タイヤ表面の状態および照明の位置関係に依存することなく、検査の安定化および高精度化を図ることができる画像処理方法、画像処理装置、プログラムおよび記録媒体を提供する。
【解決手段】 制御部12は、タイヤ回転方向に直交する方向のラインごとに、取込画像の各画素の濃度を、各画素が含まれるライン上の平均濃度に変換して、濃度射影変換する。次に、濃度射影変換が行われた画像に対して、タイヤの回転方向のラインのうちの1つのライン上の画素について、フーリエ展開する。フーリエ展開された周波数成分からコード露出帯域の周波数成分を除いた残余の周波数成分を逆フーリエ展開し、逆フーリエ展開手段によって求めた逆フーリエ変換濃度と濃度射影変換によって求めた射影変換濃度との差分濃度を求め、差分濃度について、周期性があればコード露出と判定し、周期性がなければ刻印文字と判定して、コード露出欠陥検出処理を行う。
(もっと読む)
画像処理方法、画像処理装置、画像処理プログラムおよび記録媒体
【課題】 画像中のブラダーグルーブを検出し、検出したブラダーグルーブを画像中から除去する画像処理方法、画像処理装置、画像処理プログラムおよび記録媒体を提供する。
【解決手段】 画像処理方法は、濃度射影変換工程と、フーリエ展開工程と、周期算出工程と、逆フーリエ展開工程と、出力工程とを含む。濃度射影変換工程では、第1画像に第1方向の濃度射影変換を行って第2画像を作成する。フーリエ展開工程では、第2画像中の第2方向に並ぶ画素の濃度値をフーリエ展開する。周期算出工程では、第1画像中の線状模様の第2方向の周期を算出する。逆フーリエ展開工程では、フーリエ展開された周波数成分から、線状模様の周期を表す周波数成分を除去し、残余の周波数成分を逆フーリエ展開して第3画像を作成する。出力工程では、逆フーリエ展開工程で作成された第3画像を表す除去済画像情報を出力する。
(もっと読む)
工具位置測定方法と装置
【課題】回転工具の刃先の三次元位置を非接触で測定することができ、繰り返し精度が高く、工具刃先形状の違いによる測定誤差が小さい工具位置測定方法及び装置を提供する。
【解決手段】回転する回転工具12の刃先12aを、Z軸方向から見た回転刃先画像を撮像する回転刃先撮像工程S11を有する。回転刃先画像から、回転軸αの概略位置の仮回転軸位置を原点として、X軸上及びY軸上の輝度分布を求める。原点及びその近傍のX軸方向の複数の位置であるX反転位置から、X軸方向に同一距離だけ離れた位置同士の輝度の差分を所定範囲でX軸方向に積分したX積分値を、X反転位置ごと算出する。同様にY軸方向に、同一距離だけ離れた位置同士の輝度の差分を積分したY積分値を、Y反転位置ごと算出する。X積分値及びY積分値が最も小さくなるX積分値差最小位置及びY積分値差最小位置とで定まる座標を回転軸位置とする。
(もっと読む)
微細構造の電磁散乱特性をモデル化する方法及び装置及び微細構造を再構築する方法及び装置
【課題】周期構造の電磁散乱特性の正確な数値計算を迅速に実行する。
【解決手段】構造の電磁散乱特性を計算する体積積分法(VIM)の改良型収束は、電場ではなく、ベクトル場の体積積分方程式を数値的に解くことによって達成される。ベクトル場は、基底変換によって電場に関連付けることができ、電場が不連続部を有する材料の境界で連続することができる。ベクトル場の畳み込みは、有限離散畳み込みに従って畳み込み演算子を使用して実行する。可逆畳み込み及び基底変換演算子は、周期構造の材料及び幾何学的特性に従って基底変換を実行することにより、ベクトル場を電場に変換する。ベクトル場について体積積分を解いた後、追加の後処理ステップを使用して、ベクトル場から電場を得ることができる。ベクトル場は、連続的な成分をフィルタリングするために法線ベクトル場を使用することにより、電場の場の成分と電束密度の組合せから構築することができる。
(もっと読む)
3次元撮像装置
【課題】一つの撮像装置で距離情報と色情報の導出を実現できて立体カラー撮像画像を得る。
【解決手段】3次元撮像装置1は、光源手段2からの投射光L1として近赤外光が被計測物Aに照射され、この投射光L1の被計測物Aからの反射光L2を受光手段3で受光し、受光手段3の受光情報に基づいて被計測物Aまでの距離情報を信号処理部4により導出する距離情報導出手段52と、自然光または照明光による被計測物Aからの反射光L2を受光手段3で受光して、この受光手段3の受光情報に基づいて被計測物AのR(赤),G(緑)およびB(青)の色情報を信号処理手段4により導出する色情報導出手段53とを有して3次元画像を撮像する。
(もっと読む)
半導体における周期構造の実時間分析
【課題】試料に形成された周期構造の特性を実時間で分析する。
【解決手段】波長の関数としての信号を発生させる分光計測モジュールがを使用する。出力信号はプロセッサーにより方形構造の理論的な初期モデルを構築する。次いで、プロセッサーは、この試料の広帯域放射に対する理論的な光学的応答を計算する。光学的応答の計算結果は、複数の波長において計測され正規化された値と比較される。この比較に基づいて、モデルの構成は実際の計測された構造により近づくよう修正される。プロセッサーは修正されたモデルの光学的応答を再計算し、計算結果を正規化されたデータと比較する。最適な方形が得られるまでこの処理が反復して繰り返される。その後、モデルを各々幅と高さを持つ層に分割しモデルの複雑さを反復して増大させる。構造が周期構造に類似するような最適なモデルが得られるまで、反復処理によりデータが最適化される。
(もっと読む)
気相成長装置および気相成長方法
【課題】
MOCVD装置の基板など移動台の上に置かれた被測定物の形状測定を行う場合、速度計測装置の使用状態で異なるオフセット値の影響により、測定精度が低下することと、回転台に複数の被測定物を配置する装置で測定精度が低下すること、回転台の振動や回転軸の傾きなどで測定精度が低下することなどで、精度よく測定することができなかった。
【解決手段】
被測定物を移動させる移動台と、レーザ光線によるドップラー効果を利用した速度計測手段と、被測定物検出手段と、演算処理手段と記録手段により、被測定物の形状を測定する。前記演算処理手段は、前記被測定物の速度を抽出する被測定物速度抽出手段と、速度データから速度平均値を算出する速度平均算出手段と、速度データから速度平均値を減算する減算手段と、速度を積分する積算手段を設ける。
(もっと読む)
鋼板の突き合わせ開先位置の検出方法および装置
【課題】端部に「ダレ」を有している鋼板においても、正確にかつ安定して突き合わせ開先位置を検出する。
【解決手段】2枚の鋼板の突き合わせ部を、突き合わせ線が前記撮像装置の撮像面の水平軸方向となるようにして撮像する撮像工程と、撮像工程で取得された撮像画像から得た部分画像を、予め設定した閾値Tを用いて2値化画像を出力する2値化工程と、2値化画像において水平軸方向をx軸方向、垂直軸方向をy軸方向として、各画素座標(i、j)の2値化輝度値U´について、y軸方向の輝度差分値Vを、各iについて演算する工程イと、工程イで演算した輝度差分値Vをiについて積算して輝度差分射影値Wを演算する工程ロと、工程ロで演算した輝度差分射影値Wにおいてピークの画素位置を求めて、前記2枚の鋼板それぞれの突き合わせ開先位置として検出するピーク位置検出工程とを有する検出方法。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】3次元画像処理といった、複数の撮像部からそれぞれ生成される画像データを処理することのできる画像処理装置において、特定の画像処理に必要な複数の画像データをそれぞれ生成する複数の撮像部に対する各種設定を容易に行うことのできる画像処理装置を提供することである。また、そのような画像処理装置に向けられた画像処理プログラムを提供する。
【解決手段】接続される複数の撮像部をいくつかのグループに分けた上で、各グループに属する撮像部を一まとまりにして、必要な撮像条件を設定するためのユーザインターフェイスを提供する。
(もっと読む)
表面形状測定装置および方法
【課題】走行する薄鋼板表面上に加工される微小凹凸形状を高精度で測定することを可能とする表面形状測定装置および方法を提供することを課題とする。
【解決手段】光学式変位計で相対的に移動する物体の表面を走査して、測定した変位信号から物体表面の凹凸形状を取得し、変位信号と同期して受光する反射光強度を反射光強度信号として取得し、凹凸形状からうねりを取除いて補正凹凸形状を算出し、補正凹凸形状と反射光強度信号に基いて凹部の底部範囲または凸部の山部範囲として特定し、底部範囲または山部範囲内にある補正凹凸形状から凹部の深さまたは凸部の高さを算出し、底部範囲または山部範囲の両端より外側で最も近い点を凹凸部のエッジとして検出し、検出したそれぞれのエッジ間の距離から凹部または凸部の幅を算出する。
(もっと読む)
面形状計測装置
【課題】面形状計測装置における計測ヘッドの小型化および軽量化に有利な技術を提供する。
【解決手段】被検面の形状を計測する面形状計測装置は、基準点から光を放射し被検面で正反射して戻ってくる被検光を検出することによって前記被検面から前記基準点への法線の方位を計測するための計測ヘッドと、前記計測ヘッドを走査する走査機構と、前記計測ヘッドを使って計測された法線の方位と前記基準点の位置とに基づいて前記被検面の形状を計算する処理部とを備え、前記処理部は、前記基準点の座標を(s,t,u)、前記被検面から前記基準点への単位法線ベクトルを(α,β,γ)、前記被検面上の点の座標を(x,y,z)、q0を定数としたときに、(x,y,z)=(s,t,u)−q(α,β,γ)q=q0+∫(αds+βdt+γdu)に基づいて前記被検面の形状を計算する。
(もっと読む)
表面形状測定装置
【課題】ワークの表面形状を非接触で高速に測定でき、測定時のワークの振れを特殊な機構を用いることなく補正可能であるなど極めて実用的な表面形状測定装置の提供。
【解決手段】ワークに測定光を照射する照明手段と、測定光の反射光を撮像する撮像手段とを有し、ワークと撮像手段とを相対的に回転させながら該ワークの外周表面に測定光を照射し、このワークからの反射光を撮像手段により撮像して該ワークの表面形状を測定する表面形状測定装置であって、測定光をワークに撮像手段の光軸と同軸方向で照射する同軸落射照明手段を有し、更に、撮像手段により撮像した各画像データに基づいて撮像手段の光軸方向成分においてワークの外周上で該撮像手段に最も近い点の該撮像手段の光軸垂直面内における変位を積分し該ワークの表面形状を算出する演算手段を有するもの。
(もっと読む)
面形状計測装置
【課題】計測ヘッドを走査して形状計測するには、傾斜角および変位量の双方を検出する必要があり、計測ヘッドが大型化し、重量も重くなるため、計測ヘッドの小型化および軽量化に有利な技術を提供する。
【解決手段】被検面の形状を計測する面形状計測装置は、基準点から光を放射し被検面10で正反射して戻ってくる被検光と参照光との干渉を検出することによって基準点と被検面との間の距離を計測するための計測ヘッド110と、計測ヘッドを走査する走査機構と、計測ヘッドを使って計測された垂直距離と前記基準点の座標とに基づいて被検面の形状を計算する処理部とを備え、処理部は、基準点の座標を(s,t,u)、基準点から被検面までの垂直距離をq、前記被検面上の点の座標を(x,y,z)としたときに、(x,y,z)=(s,t,u)−q(α,β,γ)(α,β,γ)=(∂q/∂s,∂q/∂t,∂q/∂u)に基づいて被検面の形状を計算する。
(もっと読む)
41 - 60 / 250
[ Back to top ]