
Fターム[2F065RR05]の内容
光学的手段による測長装置 (194,290) | 比較基準データの作成、設定 (2,769) | 比較相手 (2,648) | 形状特性値 (511)
Fターム[2F065RR05]に分類される特許
101 - 120 / 511
形状認識装置
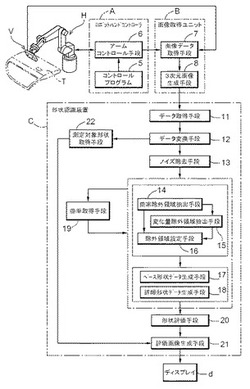
【課題】2次元構造の断面データが表す形状曲線を近似するための処理を簡単に行うことが可能な形状認識装置を提供する。
【解決手段】形状認識装置Cは、3次元データが表わす外面形状の曲率が第1所定値を超える領域を抽出する曲率除外領域抽出手段14と、曲率の変化量が第2所定値を超える領域を抽出する変化量除外領域抽出手段15と、曲率除外領域抽出手段14により抽出された領域と変化量除外領域抽出手段15により抽出された領域とを除外領域として設定する除外領域設定手段16と、3次元データにおける設定領域の形状を詳細に反映した詳細形状データと粗く反映したベース形状データとを取得すると共に、夫々の形状データから除外領域に含まれるデータを除外して夫々の修正形状データを生成し、夫々の修正形状データの曲率に基づいて外面形状の歪値を抽出する形状評価手段20と、を備える。
(もっと読む)
物体識別装置

【課題】差分偏光度を用いて撮像画像中における識別対象物の画像領域を識別することが困難な状況下であっても、その撮像画像中の識別対象物の画像領域を高い精度で識別することを課題とする。
【解決手段】撮像領域内のP偏光画像及びS偏光画像を偏光カメラ10で撮像し、画素ごとに、P偏光画像及びS偏光画像間における輝度合計値(モノクロ輝度)と、当該輝度合計値に対するP偏光画像及びS偏光画像間における輝度差分値の比率を示す差分偏光度を算出する。そして、差分偏光度が所定の差分偏光度閾値以上であれば、差分偏光度画像処理部15が算出した差分偏光度を用いて識別対象物である路端エッジ部を識別し、そうでなければ、モノクロ画像処理部13が算出したモノクロ輝度を用いて路端エッジ部を識別する。
(もっと読む)
寸法測定装置、寸法測定方法及び寸法測定装置用のプログラム
【課題】 複数のワークについて、相対的な位置関係を把握し易く、測定結果を容易に識別することができる寸法測定装置を提供する。
【解決手段】 特徴量情報、測定対象箇所情報及び設定値情報を保持する測定設定データ記憶部21と、ワークの位置及び姿勢をそれぞれ検出する配置状態検出部24と、ワーク画像A1から測定対象箇所のエッジを抽出するエッジ抽出部24と、抽出されたエッジに基づいて測定対象箇所の寸法値を算出し、測定対象箇所及びワークの良否判定を行う良否判定部25と、ワークの良否判定の結果をワーク画像A1上に表示する測定結果表示手段と、ワークのいずれかを選択するためのワーク選択部27により構成される。測定結果表示部26は、選択されたワークについて、測定対象箇所の良否判定の結果を表示する。
(もっと読む)
画像測定装置、画像測定方法及び画像測定装置用のプログラム
【課題】 複数のワークについて、輪郭の不一致度合いを容易に識別することができる画像測定装置を提供する。
【解決手段】 ワーク画像A2からエッジを抽出するエッジ抽出手段と、ワーク画像A2及び予め保持されたマスター画像A1を比較する画像比較手段と、比較結果に基づいて、ワーク画像A2のエッジ位置とこのエッジ位置に対応するマスター画像A1上の位置との変位量を示す誤差を算出する誤差算出手段と、複数のワーク画像A2について算出された誤差の統計情報をエッジ位置ごとに算出する統計情報算出手段と、統計情報を、その値に応じた表示態様でワーク画像A2又はマスター画像A1から抽出されたエッジ位置に沿って表示する統計情報表示手段により構成される。
(もっと読む)
マスク画像作成システム
【課題】多関節型ロボットにより移動されるカメラの視点に応じて柔軟にマスク画像を作成するとともに、マスク画像を作成する手間を減らすことのできるマスク画像作成システムを提供する。
【解決手段】マスク画像作成システムは、複数の関節を有するアーム21を動作させる多関節型ロボット20と、アーム21に設けられてアーム21の動作により移動されるとともに、ワークWを撮像して実画像を取得するCCDカメラ28と、画像処理装置10とを備える。画像処理装置10は、アーム21の位置及び方向に基づいて、カメラ28の位置及び方向を算出し、ワークWの形状を表す3次元データ、ワークWの位置及び方向、並びにカメラ28の位置及び方向に基づいて、カメラ28によりワークWを撮像したと仮想した場合の仮想画像を取得する。そして、この仮想画像に基づいて、カメラ28により取得される実画像の一部をマスキングするマスク画像を作成する。
(もっと読む)
車両間隔検出システム、車両間隔検出方法及び車両間隔検出プログラム
【課題】料金所内に前後車両が接近して入ってきたとき、前後車両の撮像画像から通信可否を判定する。
【解決手段】前方車両の前部画像を撮影する車両撮影手段11と、撮影された画像などから車両を検出する車両検出手段21と、撮影された前方車両の前部画像に映るフロントガラス底辺の画像位置に基づき前記無線受信器から前記前方車両のフロントガラス底辺までの水平距離の他、フレームレートとガラス底辺画像の変化から速度を求める距離演算手段22と、前方車両の車両サイズ(車両長さ,後部高さ)を取得する車両サイズ取得手段23と、前方車両の速度と水平距離+車両長さとを用いて、前後車両の車間距離を推定し、後続車両でのDSRC通信による料金収受データの受信不可(隠れ)を判定する隠れ発生有無判定手段24とを備えた車両間隔検出システムである。
(もっと読む)
電子部品実装装置
【課題】撮像による画像データを用いてより高精度な実装対象の電子部品の外部情報を取得する。
【解決手段】部品配置部に配置された電子部品を撮像する撮像手段1と、部品配置部と撮像手段との距離を可動調節する可動部111と、これらを制御して、電子部品について部品配置部と撮像手段の距離が異なる複数の画像データを取得する撮像制御部120と、各画像データの同一画素におけるコントラストの対比に基づいて、当該各画素における撮像手段から部品配置部の合焦点位置を求める測距処理部23と、撮像エリア内の各画素における合焦点位置と、各画像データにおける各画素の輝度値とから、撮像エリアの一部の範囲内の画素における合焦点位置での輝度値を求め、局所全焦点画像を生成する全焦点画像生成部25とを備えている。
(もっと読む)
パターン検査装置、パターン検査方法、およびパターンを有する構造体
【課題】検査感度を向上させることができるパターン検査装置を提供する。
【解決手段】第1の検出データと前記第1の遅延データとから解像限界以下のパターンのデータを抽出する第1の抽出部33と、前記抽出された第1の検出データに係るデータの注目画素に対する周辺領域の出力レベルの平均値を演算し、前記抽出された第1の検出データに係るデータの出力レベルと前記平均値との差を演算する第1の出力変位演算部34aと、前記抽出された第1の遅延データに係るデータの注目画素に対する周辺領域の出力レベルの平均値を演算し、前記抽出された第1の遅延データに係るデータの出力レベルと前記平均値との差を演算する第2の出力変位演算部34bと、前記第1及び第2の出力変位演算部による演算結果に基づいて、パターン欠陥を検出する。
(もっと読む)
貼合わせ基板の位置ズレ検出装置およびそれを用いる半導体製造装置ならびに貼合わせ基板の位置ズレ検出方法
【課題】円板状の2組の基板を上下に積層して成る貼合わせ基板において、素子形成などにあたって、基板中心位置のズレ量を一括して求められるようにする。
【解決手段】輪郭測定手段3によって、貼合わせ基板2の厚み方向の投影像から2組の基板21,22を合わせた輪郭形状を検出する一方、エッジ形状測定手段4によって、周方向の複数点において、貼合わせ基板2の接線方向の投影像から2組の基板21,22それぞれのエッジ形状を検出する。そして、演算手段6が、輪郭測定手段3の検出結果から、いずれか一方の組の基板の形状データを検出し、直径および中心位置を求める一方、他方の組の基板については、その一方の組の基板の形状データを基準に、エッジ形状測定手段4で検出された2組の基板間の相対的な位置関係から、形状データを求め、直径および中心位置を求める。その後、2組の基板間の中心位置の距離から、前記ズレ量を求める。
(もっと読む)
3次元形状測定装置
【課題】光切断線の湾曲成分を除去し、太陽電池ウエハの断面形状データを精度良く算出する。
【解決手段】ウエハ形状データ取得部221は、ウエハ画像から光切断線の形状を示すウエハ形状データを取得する。標準平面形状データ取得部222は、所定の標準平面の高さを数段階変化させ、標準平面画像から各高さにおける光切断線の形状を示す標準平面形状データを取得する。形状補正部341は、ウエハ形状データと形状が最も近い標準平面形状データを、標準平面形状データ記憶部80から特定し、特定した標準平面形状データ及びウエハ形状データの差分を補正ウエハ形状データとして算出する。断面形状算出部342は、形状補正部341で算出された補正ウエハ形状データからウエハ断面形状データを算出する。
(もっと読む)
ワーク識別装置
【課題】 コンベアに投入される多品種のワークを誤りなく識別するための識別装置及び識別方法の提供。
【解決手段】 本発明の識別装置は、ワーク(4A)の表面までの距離を計測する計測装置(8A)と、その計測装置(8A)をワーク(4A)の長手方向に移動させる移動装置(10A)と、これらを制御する制御装置(14A)とを有しており、前記ワーク(4A)には所定領域に種類を判別するため浮き出し文字(22A)が印字されており、前記制御装置(14A)は、計測装置(8A)を移動装置(10A)により移動させながらワーク(4A)表面までの距離を計測し、計測装置(8A)で計測されたワーク(4A)の所定領域における浮き出し文字(22A)による隆起の有無とその位置及び形状を特定し仕様の照合を行って種類・仕様の判断をする制御機能を有する。
(もっと読む)
物品検査装置及び物品検査方法
【課題】従来の検査装置の設備をできるだけ利用しつつ、従来に比べて、撮像手段の配置の制約を緩和させ、より自由度の高い設定を可能とし、より汎用性が高く、取り扱いが容易な物品検査装置を低コストで提供する。
【解決手段】物品11を搬送する搬送手段2と、物品11を上方側から撮像する第1撮像手段3dと、側方側から撮像する第2撮像手段3a、3bと、制御手段6と、を備え、上面画像12及び側面画像13、14を取得し、実際の物品の長さが略同一となる対応関係を有する部位を基準部位とし、第1の長さL1として上面画像における基準部位の長さを測定し、第2の長さL2として側面画像における基準部位の長さを測定し、第3の長さL3として側面画像における測定部位の長さを測定し、第1の長さL1と第2の長さL2との対応関係に基づいて、第3の長さL3を補正して測定部位の長さXを算出する。
(もっと読む)
ガラス基板検査装置及びガラス基板製造方法
【課題】簡易な構成で素材、板厚、端面の状態等を含めたガラス基板等の状態の検査を行うことが可能なガラス基板検査装置及びガラス基板製造方法を提供することを目的としている。
【解決手段】画像データを解析する解析手段を有し、前記解析手段は、前記画像データから特定の色の画像データを抽出する色抽出手段と、前記色抽出手段により抽出された前記特定の色の画像データを含む第一の所定領域の画像データの色の変化に基づき前記ガラス基板の端面に対する加工が行われているか否かを検出する端面状態検出手段と、
を有する。
(もっと読む)
地形データの取得方法
【課題】レーザレーダを用いて監視領域の物体を検知するのに用いる監視領域の地形データを、監視領域が広い場合であっても精度よく取得できるようにすること。
【解決手段】侵入物体Sが存在しない状態で監視領域Aの地面Lを、表面に高反射率の反射材をコーティングした反射シートRで覆い、その状態で走査光により監視領域Aの地面Lを走査して、反射シートRの表面からの反射光を受光する。これにより、地面Lを直接走査光で走査する場合に比べて反射光の受光強度を高くする。よって、走査光の入射が浅くなって反射光の強度が微弱となる遠方の監視領域Aについても、反射率のよい反射シートRからの反射光に基づいて、監視領域Aの地面Lの地形データを精度よく取得することができる。
(もっと読む)
情報処理システムおよびプログラム
【課題】対象物の外縁と回転保持台の回転軸との距離が三次元測定機の測定可能範囲の長さよりも長い場合であっても回転軸の位置および姿勢の情報を取得する。
【解決手段】情報処理システムは、対象物の三次元形状を測定する三次元測定機と、所定の特徴部と、保持基準部とを備えた校正用対象物と、校正用対象物を保持する回転保持手段と、三次元測定機に対する回転保持手段の回転軸の位置および姿勢の情報である回転軸情報を取得する回転軸情報取得手段と、を備える。そして、保持基準部は、特徴部に対する回転軸の位置および姿勢が既知の配置関係に保持されるための基準であり、回転軸情報取得手段は、保持基準部によって回転保持手段に保持された校正用対象物の特徴部を三次元測定機が測定して得た測定情報を、前記既知の配置関係に基づいて変換することにより回転軸情報を取得する。
(もっと読む)
タイヤの外観検査装置及び外観検査方法
【課題】画像処理によるタイヤの外観検査において精度良く検査を行うことができるタイヤの外観検査装置及び外観検査方法を提供する。
【解決手段】タイヤの径方向の断面形状をタイヤ周方向に沿って取得する断面形状取得手段と、各断面形状に対して円弧をフィッティングさせる円弧フィッティング手段と、円弧の中心位置を算出する円弧中心位置算出手段と、各断面形状の円弧の中心位置に基づき、各断面形状を整列する断面形状整列手段とを含むようにした。
(もっと読む)
三次元形状計測装置、キャリブレーション方法、およびロボット
【課題】三次元形状計測における高さ方向のキャリブレーションを効率的に且つ高精度に行う。
【解決手段】階段形状のキャリブレーション用ブロックと、これが載置される載置台40を移動させる載置台駆動部30と、撮像画像から光切断線を検出する光切断線検出部22と、光切断線から特徴点を検出して特徴点座標値を計算し、この特徴点座標値と載置台40の移動ピッチとキャリブレーション用ブロックの所定の属性データとを関連付けた特徴点情報を生成する反射位置計算部23と、特徴点座標値と移動ピッチとから世界座標系における特徴点の三次元座標値に変換する変換行列を計算する変換行列計算部24と、特徴点情報と変換行列とに基づいて、撮像画像の画像平面の二次元座標値とこれに対応する世界座標系の三次元座標値との組み合わせを求めて校正用データを生成する三次元座標変換部25とを備えた。
(もっと読む)
帯状体の形状測定装置、方法及びプログラム
【課題】圧延材等の帯状体に空間定在波が発生した場合にも正確な形状測定を可能とする。
【解決手段】長手方向に搬送される圧延材101の表面に光源106から長手方向のスリット光106aを照射し、そのスリット光106aを2次元カメラ107により撮像する。形状測定装置は、2次元カメラ107で得られた画像データから光切断法により圧延材101の長手方向の板高さ分布を計算する板高さ分布計算部2と、板高さ分布計算部2で計算した板高さ分布に基づいて圧延材101に空間定在波104が発生しているか否かを判定する判定部3と、判定部3で空間定在波104が発生していると判定した場合、板高さ分布計算部2で計算した板高さ分布を用いて圧延材101の走行軌道Sを計算する走行軌道計算部4と、走行軌道計算部4で計算した走行軌道Sに沿って圧延材101の形状(平坦度)を指す指標である板伸び率を計算する形状測定部5とを備える。
(もっと読む)
位置姿勢計測装置及び位置姿勢計測プログラム
【課題】初期設定でユーザに手間を掛けることなく正確にカメラポーズ及び対象の3次元形状を計測できるようにする。
【解決手段】初期値算出部11は、平面上に撮像対象が配置されている状態を、球形等の近似似撮像対象が配置されている状態であると近似し、初期カメラポーズを決定し、3次元座標を算出する。また、初期値算出部11は、初期値の候補から実際の3次元シーンの真値に近い値を選択し初期値として設定する。これにより、ユーザによる事前の作業なく、初期値として実際の3次元シーン形状に近い形状を指定できる。
(もっと読む)
3次元形状計測方法、3次元形状計測装置、及びプログラム
【課題】1回のパターン投影、及び撮影により計測対象の3次元形状を復元する。
【解決手段】投影装置1は、所定の投影パターン(円形白黒コード群)を計測対象4に投影する。撮像装置2は、投影パターンが投影された計測対象4を撮影する。コード抽出部3−2は、撮影した画像からコードを抽出する。コード識別部3−3は、抽出したコードからコード番号を識別する。ワード生成部3−4は、着目コード番号の4近傍のコード番号を探索してワードを生成する。対応点算出部3−5は、生成されたワードを用いて、撮影画像中のワードと投影パターンのワードとの対応をとり、対応点の座標を得る。3次元位置算出部3−6は、3角測量の原理を用いて、撮影画像中のワードの中心座標と投影パターンの中心座標とから3次元座標位置を算出する。
(もっと読む)
101 - 120 / 511
[ Back to top ]