
Fターム[2F065RR05]の内容
光学的手段による測長装置 (194,290) | 比較基準データの作成、設定 (2,769) | 比較相手 (2,648) | 形状特性値 (511)
Fターム[2F065RR05]に分類される特許
61 - 80 / 511
3次元寸法測定装置
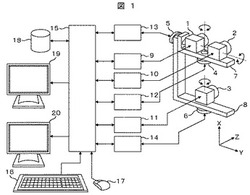
【課題】本発明の目的は、画像を用いた測定において、1枚の画像に納まりきらない程の高い倍率で画像を取得する際にも、容易な操作で画像を取得でき、かつ、寸法を算出する際に、1枚の画像に納まりきらない程の高い倍率で撮影した画像を用いることで、1枚の画像に納まりきる画像から寸法を算出するよりも高い精度で寸法を算出可能な装置を提供することにある。
【解決手段】本発明は、ワイドカメラの画像からワークの輪郭を抽出し、抽出された輪郭情報に基づき、駆動機構の走査軌跡および、複数のカメラの撮像倍率を決定し、決定された走査軌跡を走査中に、複数のカメラから複数枚の画像を取得し、複数枚の画像を合成して、高倍率の画像を生成し、生成された高倍率画像から高精度に輪郭の寸法を求めることを特徴とする。
(もっと読む)
照明装置、パターン検査装置及び照明光の形成方法

【目的】コヒーレント光の干渉性をより排除することが可能な照明装置を提供する。
【構成】照明装置300は、コヒーレント光を発生する光源103と、ランダムに配置された、波長以下の高さの複数の段差領域が形成され、光源からの光線を通過させて位相を変化させる回転位相板14と、複数のレンズがアレイ状に配列され、回転位相板を通過した光線を通過させるインテグレータ20と、を備え、複数の段差領域の最大サイズと回転位相板から蝿の目レンズの入射面までの光学倍率の積が、複数のレンズの配列ピッチ以下となる箇所と、複数のレンズの配列ピッチより大きくなる箇所とが混在するように構成されたことを特徴とする。
(もっと読む)
情報処理装置および方法
【課題】 モデル座標系を基準とした位置姿勢の自由度のうち、特定自由度のパラメータを一意に定める特徴が不足するような物体においても、ロバストかつ高精度な位置姿勢計測を実現する。
【解決手段】 計測対象物体との位置姿勢合わせにより、当該計測対象物体の位置姿勢を取得するための三次元形状モデルを保持するモデル保持手段と、前記計測対象物体の画像を取得する画像取得手段と、前記三次元形状モデルの第一の幾何特徴と前記画像内の第一の幾何特徴とに基づき、第一の座標系において、前記三次元形状モデルの第一の位置姿勢を取得する第一の位置姿勢取得手段と、前記三次元形状モデルの第二の幾何特徴と前記画像内の第二の幾何特徴と前記第一の位置姿勢とに基づき、前記第一の座標系と異なる第二の座標系において、前記三次元形状モデルの第二の位置姿勢を取得する第二の位置姿勢取得手段と、を有することを特徴とする。
(もっと読む)
基板検査装置および基板検査システムならびに基板検査結果の確認用画面の表示方法
【課題】部品およびはんだに対する3次元計測結果に基づく検査の結果や検査対象部位の状態を、ユーザが容易に確認できるような表示を行い、検査結果の確認作業を支援する。
【解決手段】基板上の部品およびはんだに、それぞれ異なる手法の3次元計測を実施し、それぞれの計測により得た3次元情報をはんだ付け部毎および種別毎に読出可能に蓄積する。そして、これらの蓄積情報に基づき、はんだ付け部位毎に部品とはんだとの関係を表す画像を生成し、この画像を含む画面を検査結果の確認用の画面として表示する。好ましい確認用画面では、はんだの3次元情報が表す立体形状を部品のはんだへの接合面の近傍位置で切断した場合に得られるはんだの断面を正面として、このはんだの断面と部品との関係を示す画像(YZ図またはXZ図)が表示される。
(もっと読む)
画像プローブの校正方法とタッチプローブ
【課題】簡易的な構成で画像プローブの校正を高精度に行いながら画像プローブによる被測定物の対象拡大と画像プローブの使い勝手の向上が可能となる。
【解決手段】撮像方向(光軸Dの方向)を垂直方向に保持し画像プローブデータを取得する工程(ステップS2)と、撮像方向を所望角度に傾斜させ傾斜角度データを取得する工程(ステップS8)と、プローブ交換工程(ステップS10)と、撮像方向を垂直方向に保持した際の初期角度でタッチプローブ118を保持しタッチプローブデータを取得する工程(ステップS12)及び位置関係データを取得する工程(ステップS16)と、傾斜角度データでタッチプローブ118を傾斜させ傾斜タッチプローブデータを取得する工程(ステップS20)と、画像プローブデータ等に基づいて、所望角度への傾斜後の画像プローブ116の焦点位置及び光軸D周りの回転角を校正する工程(ステップS22)と、を含む。
(もっと読む)
三次元形状測定装置
【課題】被検物の一部に単位距離あたりの形状変化が大きい部分があっても、データ取得時間を短くする。
【解決手段】検査光を被検物に照射する照射部21と、検査光と被検物とを相対移動させる移動部と、検査光が照射された被検物を撮像し、撮像結果を出力する撮像部22と、撮像部22の撮像結果に基づいて、前記被検物の三次元形状を前記相対移動の方向に間隔をおいて演算する座標算出部53と、被検物の形状に応じて前記間隔を変更する制御部41と、を備える。
(もっと読む)
拡張現実提供装置、拡張現実提供システム、拡張現実提供方法及びプログラム
【課題】少ないマーカの種類で多様なコンピュータグラフィックス画像データを重畳表示することを可能とする技術を提供することを目的とする。
【解決手段】識別情報を含む画像を撮影する撮影手段と、撮影手段により撮影された画像の画像データに含まれる識別情報を認識する認識手段と、前記識別情報と前記コンピュータグラフィックス画像データとの対応関係ルールを記憶するルール記憶手段と、認識手段により認識された識別情報に対応するコンピュータグラフィックス画像データを決定する決定手段と、決定手段により決定されたコンピュータグラフィックス画像データを現実空間の画像と合成して表示させる表示手段とを有し、認識手段により同一の識別情報が複数認識された場合、前記ルール記憶手段より同一複数の識別情報に対する対応関係ルールに基づいてコンピュータグラフィックス画像データを合成して重畳表示することによって課題を解決する。
(もっと読む)
計測方法及び計測装置
【課題】非球面を含む被検面の計測に有利な技術を提供する。
【解決手段】非球面を含む被検面を照明する第1の光学系と前記被検面からの光を検出面を有する検出部に導く第2の光学系と、既知の非球面形状を有する基準面を前記検出面と共役な面に配置し、前記基準面からの光が前記検出面に入射する角度を前記検出面上の複数の座標のそれぞれについて前記検出部で検出する第1のステップと、前記被検面を前記共役な面に配置し、前記被検面からの光が前記検出面に入射する角度を前記検出面上の複数の座標のそれぞれについて前記検出部で検出する第2のステップと、前記第1のステップで検出された角度と前記第2のステップで検出された角度との角度差により、前記被検面の面形状と前記既知の非球面形状との差分形状を求め、前記既知の非球面形状に前記差分形状を加えることで前記被検面の面形状を算出する計測方法を提供する。
(もっと読む)
ラベル検査方法及び装置
【課題】容器に貼付されたラベルの良否がラベラ内で検査できるラベル検査装置を提供する。
【解決手段】自転しながら公転軌道3aを公転する容器2にラベル7を貼付するラベラ1と、ラベラ1の公転軌道3aを挟んで対向し、かつラベルの正面方向またはラベルの側面方向に設置された少なくとも一対の撮像手段12a〜12dと、撮像手段12a〜12dが撮像した容器2の画像をから容器2に貼付されたラベル7の特徴点を計測する画像計測演算手段と、ラベル7の良否を判定する基準値が設定された良否判定基準値設定手段と、画像計測演算手段が計測した特徴点と基準値とを比較演算してラベル7の良否を判定する良否判定演算手段とから構成したもので、ラベラ1内に撮像手段12a〜12dを設置するだけでよいため、既存のラベラにも容易かつ安価に実施することができる。
(もっと読む)
形状測定装置
【課題】光切断法を用いた形状測定装置の投光手段または撮影手段に付着した異物を容易に検出する技術を提供する。
【解決手段】被測定物Wにスリット光を投光する投光手段1,2と、撮像面を有し、スリット光が投光された被測定物Wを撮影する撮影手段3,4と、撮影手段3,4により撮影された画像の中のスリット光の像である光切断線に基づいて被測定物Wの形状を算出する形状算出部と、を備えた形状測定装置Aは、スリット光が直線として投光される面を有する被測定物Wにそのスリット光が投光された状態で撮影された画像の中の光切断線の連続性を判定することにより投光手段1,2または撮影手段3,4に付着した異物の有無を判定する。
(もっと読む)
表面検査装置
【課題】スリット光によって測定対象物に形成される光切断線における干渉縞を低減して良好に表面測定が行われる表面検査装置を構成する。
【解決手段】半導体レーザLDからのレーザ光LBから直線状の領域に拡がるスリット光Sを作り出してワークに照射し、これを撮影ユニットで撮影した画像データからスリット光Sが照射された光切断線を抽出してワークの表面形状データを生成するように表面検査装置を構成する。半導体レーザLDが、PN接合型で接合面の境界部分に沿って直線方向Mに形成される発光層17を有し、この直線方向Mが、スリット光Sの拡がり方向と直交するように相対的な姿勢を設定した。
(もっと読む)
姿勢検出装置
【課題】人物にマーカーを設置することなく、人物の姿勢を高精度で検出する。
【解決手段】各画素における輝度値がカメラから物体までの距離を示す距離画像を取得する距離画像取得部10と、前記距離画像取得部10が取得した前記距離画像に基づいて、三次元空間中での物体の座標を計算する座標計算部20と、前記座標計算部20が計算した物体の座標に基づいて、三次元空間中で所定の体積しきい値以上の体積を占める物体の領域である人物領域を決定する人物領域決定部30と、前記人物領域決定部30が決定した前記人物領域に、人体の骨格をモデル化した骨格モデルを当てはめることにより被写体人物の姿勢を検出する姿勢検出部40とを備える。
(もっと読む)
3次元情報取得方法、3次元情報取得装置、および3次元情報取得プログラム
【課題】被写体を2次元で表現する画像に基づき被写体の3次元空間内における奥行きを示す3次元情報の検出精度を高めること。
【解決手段】3次元の対象物を2次元で表わす画像の画像データを入力する画像入力ステップと、前記画像データに基づき前記画像の特徴量を示す特徴量情報を、前記画像を複数個に分割した分割エリア毎に取得する特徴量取得ステップと、3次元の対象物を2次元で表わす画像内における任意のサンプリングポイント毎に、当該サンプリングポイントの画像の特徴量を示すサンプリングポイント特徴量情報と、仮想3次元空間において前記対象物を表現した場合の前記サンプリングポイント同士の水平方向の間隔を示す3次元情報とをそれぞれ対応付ける3次元情報テーブルを参照して、前記特徴量情報が示す前記分割エリアの画像の特徴量と対応する前記3次元情報を取得する3次元情報取得ステップと、を含むことを特徴とする。
(もっと読む)
検査方法
【課題】本発明は検査方法に関し、より詳細には基板の検査方法を提供する。
【解決手段】基板を検査するために、まず、基板上に測定領域を設定し、続いて、測定領域に対する基準データ及び測定データを取得する。次に、測定領域内の所定の形状を含むようにブロック単位の複数の特徴ブロックを設定し、特徴ブロックのうちオーバーラップされる特徴ブロックをマージして統合ブロックを設定する。続いて、統合ブロック以外の特徴ブロック及び/または統合ブロックに対応する基準データと測定データとを比較して歪曲量を取得し、歪曲量を補償してターゲット測定領域内の検査領域を設定する。これにより、歪曲を補償した正確な検査領域を設定することができる
(もっと読む)
検査方法
【課題】 本発明は検査方法に関し、より詳細には基板の検査方法を提供する。
【解決手段】 基板を検査するために、先に基板上に測定領域を設定し、測定領域に対する基準データ及び測定データを取得する。 続いて、測定領域に対して変換条件を設定し、基準データと測定データとの間の歪曲量に従う変換関係を取得する。次に、比較用特徴客体が変換関係を充足するか、比較用特徴客体を除いた特徴客体から選択された検証用特徴客体が変換関係を充足するか及び基板上に形成された検査対象パッドが変換関係を充足するかを検証する検証方法うち少なくとも一つの方法を用いて変換関係の有効性を検証する。続いて、変換関係が有効であると判断された場合変換条件を確定し、確定された変換条件に従って検査領域を設定する。これにより、歪曲を補償した正確な検査領域を設定することができる。
(もっと読む)
検査方法
【課題】本発明は検査方法に関わり、より詳細には形状測定装置の測定対象物に対する検査方法を提供する。
【解決手段】基板を検査する検査装備において検査領域を設定するために、基板上に複数の測定領域を設定し、測定領域のうち測定対象物を検査するためのターゲット測定領域と隣接する少なくとも一つ以上の隣接測定領域の基準データ及び測定データを獲得した後、隣接測定領域内で少なくとも一つ以上の特徴客体を抽出する。特徴客体に対応する基準データと測定データとを比較して、歪曲量を獲得し、歪曲量を補償してターゲット測定領域内の検査領域を設定する。これにより、基準データと測定データとの間の変換関係をより正確に獲得することができ、歪曲を補償した正確な検査領域を設定することができる。
(もっと読む)
物体測定装置、物体測定方法、及び物体測定プログラム
【課題】回転工具の形状と性状を同時に測定する方法を提供する。
【解決手段】画像記憶部107は、回転する物体を撮影した画像を記憶する。画像処理部108は、一の撮影した画像の輝度値と他の撮影した画像の輝度値を画素毎に比較して輝度値画像を生成する。また、画像処理部108は、基準となる形状を示す基準画像の輝度値と輝度値画像の輝度値との差分に基づいて差分画像を生成する。性状算出部110は、差分画像に基づいて物体の性状を示す性状変数を算出する。
(もっと読む)
ブリッジ接続不良検出方法
【課題】部品のターミナルを短絡させるブリッジを検出することのできるブリッジ接続不良検出方法を提供する。
【解決手段】部品のターミナルの間を短絡させるブリッジ(bridge)を検出するためのブリッジ接続不良検出方法は部品が実装された基板に照射され反射された複数の光を通じて2Dイメージ及び高さ基準情報を獲得する段階と、2Dイメージ及び高さ基準情報のうち少なくとも一つ以上を用いて部品の回転情報を獲得する段階と、回転情報を用いて部品のブリッジ接続不良を検出するための検査領域を設定する段階と、2Dイメージを用いて検査領域内の第1ブリッジ領域を抽出する段階と、高さ基準情報を用いて検査領域内の第2ブリッジ領域を抽出する段階と、第1及び第2ブリッジ領域のうち少なくとも一つ以上を用いて部品のブリッジ接続不良可否を判断する段階と、を含む。
(もっと読む)
基板検査方法
【課題】 基板に実装された部品を検査する基板検査方法に関わり、より詳細には正確な端子領域を検出して部品の実装状態を検査することのできる基板検査方法を提供する。
【解決手段】印刷回路基板上に形成された部品の端子のチップ位置設定方法は基板上に形成された部品の端子と隣接して形成されたハンダに対して測定された測定高さを設定された基準高さと比較して仮象チップラインを設定することと、端子の長さ方向に沿って端子の幅方向に関する中心ラインを設定することと、仮象チップライン及び中心ラインの交差点から中心ラインによる測定高さを用いて端子のチップ位置を設定することと、を含む。従って、より正確な端子のチップ位置を獲得することができる。
(もっと読む)
カメラポーズ情報算出装置およびカメラポーズ情報算出プログラム
【課題】GPS装置や地磁気センサ等の検出装置を用いずに、カメラの位置や姿勢を示すカメラポーズ情報を算出すること。
【解決手段】メディア媒体に対応する画像領域である位置情報埋込領域をカメラ画像データから抽出し、電子透かしにおいて電子的に埋め込まれた媒体位置情報を前記位置情報埋込領域から抽出するとともに、前記メディア媒体の位置情報が示す位置と対応する当該位置情報埋込領域の位置を示す座標を示す画像座標情報を前記位置情報埋込領域から抽出する位置情報抽出手段と、前記位置情報抽出手段が抽出した前記媒体位置情報および当該媒体位置情報に対応する前記画像座標情報に基づき、前記実空間中における前記カメラの位置と姿勢を示すカメラポーズ情報を算出するカメラポーズ情報算出手段と、を備えることを特徴とする。
(もっと読む)
61 - 80 / 511
[ Back to top ]