
Fターム[2F065RR07]の内容
光学的手段による測長装置 (194,290) | 比較基準データの作成、設定 (2,769) | 比較相手 (2,648) | 実物 (289)
Fターム[2F065RR07]に分類される特許
201 - 220 / 289
欠陥検査装置
【課題】表面に透明薄膜が形成された基板等の試料において、透明薄膜の上面の微小な異物、キズ等の欠陥を高感度且つ高速に検査することができる欠陥検査装置を提供する。
【解決手段】本発明の欠陥検査装置によると、照明光学系は、試料の表面の法線に対して所定の入射角を有する検査用照明光を試料表面に照射し、試料表面にスリット状のビームスポットを生成する。試料の表面に対して所定の傾斜角にて傾斜した光軸を有する斜方検出系と試料の表面の法線に沿った光軸を有する上方検出系によって、ビームスポットからの光を検出する。斜方検出系と上方検出系の出力によって、試料の表面の透明薄膜上の欠陥を検出する。検査用照明光の入射角は、試料の表面の透明薄膜下面にて反射した反射光が透明薄膜上面にて全反射するときの入射角より僅かに小さい角度である。
(もっと読む)
前方監視装置

【課題】先行車両と道路敷設体とを区別し、道路敷設体によるデータを除去して先行車両の監視を行うことができる前方監視装置を提供する。
【解決手段】カメラ1により自車前方の画像を取得して逆投影画像を生成する(S101S102)。レーダ3により自車前方の物標を検知する(S103)。逆投影画像上に物標の測距点をマッピングする(S104)。各測距点に対して矩形領域を設定し(S105)、各矩形領域で輝度ヒストグラムを生成する(S106)。次に、輝度半値幅W1を算出し(S107)、該輝度半値幅W1が第1閾値Th1よりも大きければ、この部分の平均輝度Bavを算出する(S108→S109)。この平均輝度Bavが第2閾値Th2よりも大きければ、道路敷設体の測距点と判断し(S110→S111)、該当する測距点の相対位置データを使用しない。
(もっと読む)
指紋歪み検出装置を備える指紋照合装置
【課題】
本発明は、指紋照合装置に関し、特に、被認証者が故意に指紋を歪めて指紋照合を失敗させようとする場合に、故意に指紋を歪めていることを検出できるようにする。
【解決手段】
本発明は、指紋照合において、被認証者が指紋読取面に指を置いた際に、指に必要以上に大きな力を加える、指を引きずる、回転させる等の故意に指紋を歪めたことを検出する指紋歪み検出装置により、歪んだ指紋画像の入力を防ぐことができ、指紋照合率が上昇する指紋照合装置を提供する。
(もっと読む)
基板検出装置及び基板検出方法、並びに、これらの基板検出装置及び基板検出方法を用いた基板貼り合わせ装置及び基板貼り合わせ方法
【課題】 基板の位置検出用マークを撮像装置により確実に撮像すること。
【解決手段】 基板1、2の位置を検出する基板検出装置10において、基板1、2の表面に設けた位置検出用マーク60、61を撮像する撮像装置40と、基板1、2とマーク60、61を撮像する撮像装置40との相対間隔を基板1、2の表面に直交する方向において変化させる移動装置40Aと、撮像した撮像画像からマーク60、61の輪郭部分における階調の変化率を求める手段51と、階調の変化率に基づいて移動装置40Aを制御する制御装置50とを備えたもの。
(もっと読む)
光ファイバリング干渉型センサ
【課題】 光ファイバリング干渉型センサにおいて、落石や侵入者等によって生ずる局所的な振動と、風雨などによって生ずる光ファイバリングの全体に均等に加わる振動とを判別することができるようにする。
【解決手段】複数の光ファイバLa,Lbからなるリング状光路を含む光ファイバリングを有し、この光ファイバリングに互いに異なる波長λ1,λ2の光を入射させ、光ファイバリングを経た各波長λ1,λ2の光それぞれの干渉光強度を観測する光ファイバリング干渉型センサであって、光ファイバリングの全体に均等な振動が加わったときに加振位置として算出される位置の近傍における光ファイバの振動を防止する防振機構11を設けた。
(もっと読む)
微小平面の角度測定装置
【課題】本発明は、試料の微小平面の角度を光学顕微鏡の接眼レンズ及び対物レンズの中間に2個のビームスプリッタを設置した光学系を用いて測定することにより、数十μm程度 (マイクロビッカース試験の領域に対応) の測定面に対し、高い精度で角度測定が行える装置を提供することを目的とする。
【解決手段】本発明の微小平面の角度測定装置は、試料テーブルに裁置される試料の微小平面の角度を光学系を用いて測定する装置において、光学系の光軸を通る参照光と試料の微小平面で反射した測定光とを撮像素子に入射させ、撮像素子における参照光と測定光の位置のずれから試料の微小平面の角度を測定するようにしたことを特徴としている。
(もっと読む)
デジタル画像相関法の解析条件を決定する方法及び装置
【課題】 時間とともに変化する状況にある対象物に関する計測、検査を行うに際して、対象物の状況に対して解析条件を適合させ、良好な解析結果を得る。
【解決手段】 測定装置による測定値から求められる対象物の変化特性値と、経時的にデジタルカメラで逐次撮影された複数の画像の解析による得られる変化特性値との相対誤差の適合範囲をパラメータとして決定し、対象物を逐次撮影した画像中の特定位置の公称画素移動量に対する相対誤差が適合範囲内となる画像を解析結果として取得する。
(もっと読む)
画像欠陥検査装置及び画像欠陥検査方法
【課題】 繰り返しパターンを含む2つの検査画像の対応する画素同士のグレイレベル差を検出し、グレイレベル差が欠陥検出条件を満たすとき2つの検査画像のうちいずれかの画素が欠陥であると判定する画像欠陥検査において、様々な繰り返しパターンに対して、検査画像の各部に応じて欠陥検出条件の変更を容易に行うことを可能にする。
【解決手段】 画像欠陥検査装置10を、検査画像を繰り返し周期の整数倍毎に分割した画素ブロックのいずれかについて、その各画素を複数グループに分類する分類部21と、この分類結果をこの画素ブロック内における各画素のそれぞれのブロック内位置に対応して記憶する記憶部22と、他の画素ブロック内の各画素についてのそれぞれの分類結果を、各画素のブロック内位置に対応して記憶部22から読み出して決定する決定部23と、を備えて構成し、各画素について決定した分類結果に応じて欠陥検出条件を変更する。
(もっと読む)
薄膜評価用基準基板及び薄膜評価方法
【課題】エリプソメータを用いて薄膜評価を行うために使用される薄膜評価用基準基板及び薄膜評価方法を提供する。
【解決手段】エリプソメータを用いて薄膜評価を行うために使用される薄膜評価用基準基板であって、着色成分を含有する結晶化ガラスにより形成されることを特徴とする薄膜評価用基準基板とその基準基板を用いた薄膜評価方法であり、前記結晶化ガラスの主結晶として、Li2O・2SiO2を含有したり、前記着色成分としてCo、Cr、Ni及びMnの全てを含有し、前記Co、Cr、Niは酸化物CoO、Cr2O3、NiOとして各々0.3〜1.0重量%含有されており、前記Mnは酸化物MnO2として1.5〜2.5重量%含有されている場合や、前記薄膜評価用基準基板の表面の中心線平均粗さが2.0nm以下を満たすことがある。
(もっと読む)
形状計測装置、形状計測方法、およびターゲット
【課題】対象物の三次元形状を高精度で計測することが可能であり、かつ、計測精度のばらつきを防止することが可能な形状計測装置および形状計測方法を提供する。
【解決手段】形状計測装置1に、対象物11の表面に取り付けられる球状のターゲット2・2・・・と、ターゲット2・2・・・を撮像するターゲット座標用カメラ4と、ターゲット2・2・・・の画像に基づいてこれらの三次元座標を算出するターゲット座標算出手段と、対象物11の表面に所定のパターンを投影した状態で対象物11およびターゲット2・2・・・を撮像する三次元形状用カメラ5と、ターゲット2・2・・・の三次元座標、および、三次元形状用カメラ5により撮像された対象物11およびターゲット2・2・・・の画像に基づいて対象物11の三次元形状を作成する三次元形状作成手段と、を具備した。
(もっと読む)
歪み計測方法、歪み計測装置
【課題】 容易に、精確にかつ事前処理を必要としない歪み計測方法及び装置を提供する。
【課題手段】 レーザスペックルパターン2を利用し、試験片3に非接触でポアソン比をリアルタイムで計測する。
(もっと読む)
面位置検出装置、露光装置及びマイクロデバイスの製造方法
【課題】 光学系の大型化及び検出光の光量の損失を抑制することができる面位置検出装置を提供する。
【解決手段】 被検面A上に斜め方向から検出光を投射する送光光学系SLと、前記被検面Aで反射された前記検出光を受光する受光光学系RLと、該受光光学系RLを介した前記検出光を検出する検出器38とを備え、該検出器38の出力に基づいて前記被検面Aの面位置を検出する面位置検出装置2において、前記送光光学系SLは拡大倍率を有し、前記受光光学系RLは縮小倍率を有する。
(もっと読む)
画像欠陥検査装置、画像欠陥検査システム及び画像欠陥検査方法
【課題】 2画像の対応する各画素同士の画素値の差分を検出して、この差分が検出閾値を超えるとき画素部分を欠陥として検出する画像欠陥検査装置及び方法において、比較する2画像に明度差がある場合の疑似欠陥の発生を低減する。
【解決手段】 画像欠陥検査装置10を、本発明では対比される2画像の差画像とこれら2画像のうちの少なくとも一方との間の相関値を算出する相関値算出手段(20)を備えて構成し、この相関値の増加に応じて欠陥の検出を抑制する。
(もっと読む)
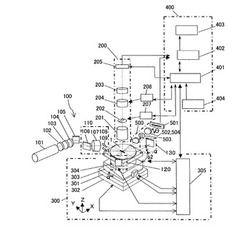
三次元形状測定装置、及び三次元形状測定方法
【課題】 学カメラを用いて三次元形状を計測する三次元形状測定装置、及び三次元形状測定方法を提供する。
【解決手段】 従来の三次元形状測定装置において測定が困難であった強反射領域、スリット欠落領域、及びスリット不連続領域を、強反射領域抽出処理部502a、スリット欠落領域抽出処理部502b、及びスリット不連続領域抽出処理部502cにより抽出し、再配置位置算出部506が抽出された各領域の3次元形状が測定可能な位置を算出する。そして、算出された各測定位置において三次元形状の測定を繰り返し、三次元計測処理部501によって各測定位置における三次元形状を統合して被写体の三次元形状のデータを生成することにより、被写体のあらゆる箇所の三次元形状を正確に測定することができる。
(もっと読む)
光切断法による3次元形状計測装置における光学ヘッド部のキャリブレーション方法及び装置
【課題】 三次元形状計測装置における従来のキャリブレーション方法では,歪み補正プレートを用いたカメラの歪み補正と,キャリブレーションブロックを用いた高さ方向のキャリブレーションを,別々に行っているので,時間がかかり,またカメラの倍率補正は行っていない。
【解決手段】 そこで本発明では,光切断法による3次元形状計測装置において,スリット光源2と,カメラ5を設置した光学ヘッド部1を所定姿勢で移動可能とする案内部7を設けたキャリブレーション装置6を構成し,この装置には光学ヘッド部の移動方向に,寸法が既知のキャリブレーションブロック8を下り階段状に複数列配置すると共に,一つ置きの列は一段低い階段状としたキャリブレーションパターンを構成したキャリブレーション装置,そしてこの装置を用いたキャリブレーション方法を提案している。
(もっと読む)
画像処理方法および該画像処理方法を用いたピッキング動作補正方法
【課題】搬送手段上を流れる搬送対象物を確実に認識することが可能な画像処理方法を提供する。
【解決手段】画像処理手段5において前回および今回におけるそれぞれの撮像画像と基準画像とのマッチング処理を行うことにより、基準位置を基準としたときの搬送対象物2に関する前回の撮像画像における実際のずれ量および今回の撮像画像における実際のずれ量をそれぞれ検出し、前記前回の撮像画像における実際のずれ量に対して撮像間隔Lを加算することにより今回の撮像画像における推定されるずれ量を算出し、この今回の撮像画像における推定されるずれ量と前記今回の撮像画像における実際のずれ量との差dを求め、この差dが所定の許容値D以下となった場合は前回の撮像画像における搬送対象物と今回の撮像画像における搬送対象物とは同一であるものと判定するようにした。
(もっと読む)
光測定装置および方法
【課題】温度環境の変化により光学系の支持体が膨張、収縮することの影響を排除して、常に高精度な測定結果を得ることが可能な三角測量方式の光測定装置を得る。
【解決手段】2つの光学系(投影系20Aおよび観察系20B)を支持するベース板11の温度を計測する温度検出部30と、計測された温度とベース板11を形成する材料の線膨張率とに基づき、計測された温度下での基線の実長を求める基線長算出部43とが設けられている。演算解析部42は、基線長の初期設定値を基準長算出部43において求められた基線の実長値に置き換えるとともに、2つの光学系により得られた観察データを用いて、基線の実長と被観察点との位置関係に基づく演算を行ない、被検体5の3次元形状を解析するように構成されている。
(もっと読む)
3次元位置観測方法及び装置
【課題】 観測対象物の位置を3次元的に検出し、顕微鏡下で運動する蛋白質1分子の3次元運動を高精度で検出することにも寄与する3次元位置観測方法と装置を提供すること。
【解決手段】 合焦及び絞り機構を有するレンズ系を備え、観測対象物からの光を撮像面に結像する観測装置において、観測対象物から撮像面に至る光路の途中に、その観測光の進行方向を複数の異なる方向に変える偏向部材を配設し、画像解析手段により、偏向部材を介して撮像面に達した複数の像の間の位置関係から、観測対象物の位置を解析する。観測対象物から撮像面に至る光路の途中に、その観測光の一部の進行方向を変える偏向部材を配設し、画像解析手段により、偏向部材を介して撮像面に達した像と、偏向部材を介さないで撮像面に達した像との位置関係から、観測対象物の位置を解析してもよい。
(もっと読む)
ハンドリング装置、作業装置及びプログラム
【課題】搬送される複数の物品に関する情報を効率的に処理できるハンドリング装置を提供する。
【解決手段】ハンドリング装置1は、ワーク100を搬送するコンベア2と、ベルト12を分割した複数のトラッキング範囲R5の画像を取得してワーク100の位置を検出する視覚センサ3と、ベルト12の移動量を検出するエンコーダ4と、エンコーダ4の検出する移動量に基づいて、複数のトラッキング範囲R5の移動量を監視し、ワーク検出エリアR12を通過中のトラッキング範囲R5を特定するトラッキングマネージャ21bと、トラッキングマネージャ21bにより特定されたトラッキング範囲R5内において物品を選択するワークマネージャ21cと、ワークマネージャ21cにより選択されたワーク100を保持するようにロボット5の動作を制御する制御部21dとを備える。
(もっと読む)
高炉出銑口径の測定方法及び測定装置
【課題】 高炉出銑口から流出する溶銑・溶融スラグ噴流の熱画像を撮像し、撮像した画像から樋滞留部を分離し、正確に噴流の直径を測定することのできる高炉出銑口径の測定方法及び測定装置を提供する。
【解決手段】 高炉出銑口4から流出する溶銑・溶融スラグ噴流8の熱放射輝度2次元分布を、露光時間が短い高速シャッターで複数枚撮像し、複数の画像間で輝度の差分を計算して差分絶対値画像を生成する。高速シャッター撮像により、噴流8は溶銑と溶融スラグとが分離したまだら模様として撮像される。まだら模様は噴流の流れに伴って移動するので、噴流部は差分絶対値画像もまだら模様となる。滞留部8は差分絶対値が小さいので噴流部と区別できる。従って、差分絶対値画像に基づいて、溶銑・溶融スラグ噴流8の直径を測定することができる。
(もっと読む)
201 - 220 / 289
[ Back to top ]