
Fターム[2F069BB21]の内容
測定手段を特定しない測長装置 (16,435) | 測定対象物の種類 (1,053) | 車;列車 (102)
Fターム[2F069BB21]に分類される特許
1 - 20 / 102
姿勢検出装置および姿勢検出方法
路面凹凸評価システム
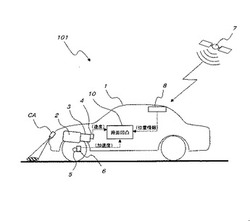
【課題】路面の凹凸評価或いはそれに必要な計測を行うことが出来、路面の凹凸評価或いはそれに必要な計測を行う車両の走行速度の変動に対処することが出来る路面凹凸評価システムの提供。
【解決手段】車両(1)に搭載された路面凹凸評価装置(10)と、当該車両(1)の車速を計測する速度センサ(4)と、当該車両(1)の垂直方向(上下方向)加速度を計測する加速度センサ(6)と、衛星(7)からの信号に基づいて当該車両の現在位置の情報(位置情報)を取得する装置(GPSレシーバー8)を備えている。
(もっと読む)
移動体長計測装置及びそれを用いた列車運行管理システム

【課題】移動体側方に設置した物体検知センサを用いて停止時にも移動体長の範囲が検出可能な移動体長計測装置及びそれを利用した列車運行管理システムを提供する。
【解決手段】移動体長計測装置は少なくとも3箇所以上の物体検知センサを有し、そのセンサ位置間距離は大小二つの距離となるよう配置し、移動体長の最小及び最大長を推定し、センサ設置位置間距離は、大きい方の距離が最大想定移動体長より大きいかまたは小さい方の距離が最小想定移動体長以下となるように配置し、センサ検出区間進入時、及び脱出時の瞬間速度または検出区間走行中の平均速度を推定し、前記瞬間速度、前記平均速度、最大加速度、最大減速度、最高速度のうち少なくとも一つを用いて移動体長の最小及び最大長を推定し、列車運行管理システムは移動体長計測装置を用いて列車長を推定し、画面上への列車存在範囲を表示する。
(もっと読む)
テープギャップ測定のためのポータブルゲージ及びその方法
【課題】テープギャップの手動測定は労働集約的であるため、構造物の大きな領域にわたる複数のテープギャップの測定を正確かつ効率的に実行し、しかもオペレーターの技能に大きく依存しないテープギャップの測定方法及び装置を提供する。
【解決手段】表面を構成する複合テープの細片間のギャップはゲージによって測定される。表面に沿ってゲージを移動するにつれて隣接するテープ細片のエッジの位置は検出され、隣接する細片間のギャップは検出したエッジの位置に基づいて計算される。
(もっと読む)
移動体の障害認識方法及び障害認識システム
【課題】精度良く障害を認識することができる移動体の障害認識方法を提供する。
【解決手段】本発明の一形態に係る移動体の障害認識方法は、移動体の障害認識方法であって、移動体の路面データ取得手段で少なくとも高さデータを含む路面データを取得するステップと、取得した路面データを高さ順に並べ替えるステップと、並べ替えた路面データの変化点を抽出するステップと、変化点を境に障害を認識するステップと、を備える。これにより、精度良く障害を認識することができる
(もっと読む)
重心高さ計測装置、自動車検査システム、及び重心高さ計測方法
【課題】正確に且つ短時間で物体の重心高さを測定することができる重心高さ計測装置、及び重心高さ計測方法を提供する。
【解決手段】本実施形態に係る重心高さ計測装置40は、振り子の原理により物体の重心高さを計測する重心高さ計測装置40であって、車両(物体)1を搭載する揺動ユニット19と、揺動ユニット19を支持して左右対称な振り子の円弧軌道に沿って揺動させる揺動ガイド28と、揺動ユニット19に応力を与えて揺動ユニット19を揺動させる揺動手段16と、揺動ユニット19の揺動周期を検知する変位センサ(揺動周期検知手段)8と、変位センサ8により検知された揺動周期に基づいて車両1の重心位置を演算する重心位置演算手段10と、を備えて構成されている。
(もっと読む)
操舵角検出装置および操舵角検出方法
【課題】測定作業の容易化およびコストダウンを図る上で有利な操舵角検出装置および操舵角検出方法を提供する。
【解決手段】ステアリングホイール2の形状部2Dの外周に沿って傾斜面12Aと起立面12Bとを備える複数の検出用突起12が設けられている。操舵角検出装置10は、傾斜面12Aの回転軸の半径方向における変位量dを検出し、操舵角θと変位量dとを対応付けたデータテーブルから操舵角θを特定し該操舵角θを示す操舵角データを出力し、操舵角θの特定は、検出された変位量dと、直近の操舵角θ0とに基づいて行う。
(もっと読む)
操舵角検出装置および操舵角検出方法
【課題】測定作業の容易化およびコストダウンを図る上で有利な操舵角検出装置および操舵角検出方法を提供する。
【解決手段】ステアリングホイール2の非円形部2Dは、ステアリングシャフト方向、すなわち、回転軸方向から見て回転軸の周りに非円形を呈している。操舵角検出装置10は、ステアリングホイール2の非円形部2Dの回転軸の半径方向における変位量と、ステアリングホイール2の回転方向とを検出すると共に、変位量と操舵角とを対応付けたデータテーブルから操舵角を特定して出力すると共に、操舵角の特定は、検出された変位量と、直近の操舵角と、ステアリングホイール2の回転方向とに基づいて行う。
(もっと読む)
画像から平面を検出する平面検出装置及び検出方法
【課題】車両の揺動が激しい場合でも、射影変換行列Hの初期値を短時間かつ正確に推定することができる画像から平面を検出する平面検出装置及び検出方法を提供する。
【解決手段】移動体の姿勢角を検出するステップと、検出した姿勢角を用いて記憶された平面の法線ベクトルnを修正するステップとを有する。法線ベクトルnを修正するステップにおいて、前時刻(t−1)における姿勢角を用いてカメラ座標系Cの法線ベクトルn(t−1)を慣性座標系Eの法線ベクトルnE(t−1)に変換し、次いで、現時刻(t)における姿勢角を用いて慣性座標系Eの法線ベクトルnE(t−1)をカメラ座標系Cの法線ベクトルn(t)に変換する。
(もっと読む)
測定方法及び測定装置
【課題】簡便な方法で又簡単な装置で、移動体に設定された測定点、測定点間の距離の測定、或はGPS、IMU等の座標系に対するオフセット量を測定する。
【解決手段】移動体1に対して設定した座標系に対して所定の関係に測定棒6を設置し、該測定棒6の所定位置を移動体1が設置されている地面に転写すると共に測定対象物の測定点を地面に転写し、転写された前記所定位置と転写された前記測定点間の地面上での距離を測定し、距離測定結果に基づき測定点と前記測定棒6の地面上での関係を求め、得られた関係と前記座標系に対する測定棒6との関係から前記測定点の前記座標系に於ける水平座標面での位置を求める測定方法に係り、又前記所定位置と地面、前記測定点と地面との鉛直距離を測定し、前記座標系に於ける前記測定点の3次元位置を測定する。
(もっと読む)
動き検出装置および方法
【課題】 動き検出装置および方法を提供する。
【解決手段】 1つ以上の第1回転角測定センサを用いて第1角を測定し、1つ以上の第2回転角測定センサおよび前記1つ以上の第1回転角測定センサと相違する1つ以上の2軸の角速度センサを用いて第2角を推定し、1つ以上の第3回転角測定センサおよび前記1つ以上の2軸の角速度センサを用いて前記2軸のうちのいずれか1つである第3角を推定する動き検出装置を提供する。
(もっと読む)
加速度センサ用補正装置
【課題】車両に搭載される加速度センサの出力値を正確に補正する補正装置を提供する。
【解決手段】車両20に加わる第1の加速度を測定する加速度センサ221と、車両に設置された位置検出手段220又は速度センサとに接続され、制御手段210と記憶手段222を備える加速度センサ用補正装置(ナビゲーション装置)200であって、制御手段210は、位置検出手段220又は速度センサからの出力をもとに第2の加速度を算出し、第1の加速度と第2の加速度とから求められる差分又は車両の傾き等のパラメータを記憶手段222に逐次記憶し、車両の累積走行距離が所定値に達した際に、記憶されたパラメータの平均値を算出し、この平均値を補正値として加速度センサ221を補正する。
(もっと読む)
車両位置演算装置及び車両位置演算方法
【課題】低コスト化を実現できる車両位置演算装置を提供する。
【解決手段】複数車線道路のうち、一の車線を走行する自車両の位置を計測する自車両位置計測手段と、複数車線道路のうち、他の車線を走行する他車両を検出するセンサ11と、センサ11の検出信号に基づき、自車両に対する他車両の方位を演算する他車両方位演算手段と、一の車線と他の車線との間隔を特定する車線間隔特定手段と、自車両の位置、他車両の方位及び間隔に基づいて、他車両の位置を演算する他車両位置演算手段を有する。
(もっと読む)
車両のハンドルの舵角の中心位置を判定するための装置
【課題】車両の旋回走行状態下で、ハンドルの中心位置を確定する。
【解決手段】舵角センサの第2の信号(Z相)が所定値を有する範囲(201)の中心に対応する舵角位置(Z相中心)を算出する。1個のZ相中心が算出されており、Z相中心に対して設定された判定領域内に現在の舵角位置が入っており、車両の旋回方向が左または右と判断されたならば、該1個のZ相中心に対して右または左に、ハンドルの1回転分離れた舵角位置をハンドルの中心位置として判定する(第1の判定)。2個のZ相中心が算出されており、Z相中心に対して設定された判定領域内に現在の舵角位置が入っており、車両の旋回方向が左または右と判断されたならば、右または左にあるZ相中心に対応する舵角位置をハンドルの中心位置として判定する(第2の判定)。3個のZ相中心が算出されていれば、中央のZ相中心に対応する舵角位置をハンドルの中心位置として判定する(第3の判定)。
(もっと読む)
インストルメントパネルの取付装置及び取付方法
【課題】車室内にインストルメントパネルを高精度に取り付けることを可能にするインストルメントパネルの取付装置及び取付方法を提供する。
【解決手段】インストルメントパネルの取付装置10は、ボディ14における対称位置で左右一対の車体側測定基準部120の車幅方向位置を計測する一対の第1変位計112と、車室内に搬入される前のインストルメントパネル24における対称位置で左右一対のインパネ側測定基準部122の車幅方向位置を計測する一対の第2変位計116と、第1変位計112及び第2変位計116によって得られる信号から、平面視のボディ中心位置C1及びインパネ中心位置C2を求める演算部134と、演算部134から供給される中心差ΔCに基づいてインストルメントパネル24の車幅方向位置を調整する調整手段85とを有する。
(もっと読む)
回転角検出装置
【課題】比較的簡単な構成で、高精度な回転角の検出を実現する。
【解決手段】 本発明の回転角検出装置20は、回転体4L,4Rの回転に応じて、1回転より大きく、且つ2回転未満の範囲で回転する回転手段23と、回転手段に備えられ、回転手段の回転に応じて回転手段の回転角を示す信号パルスを発生する信号発生手段21,22と、信号パルスに基づき回転手段の回転角を検出する検出手段21,22と、回転手段の回転角に基づき回転体の回転角を演算する演算手段10とを備える。
(もっと読む)
列車位置検出システム
【課題】車上側での簡易且つ高精度の位置検出を実現するとともに、位置検出に要する地上側及び車上側の装置の簡素化を図ること。
【解決手段】走行路3には、深さが異なる3種類のスリット部11A,11B,11Cが形成されたパターンプレート10が配置されている。列車5には、高さ位置が異なることで検出可能なスリット部11の種類が異なる複数の検出器30−1〜30−5が設けられている。そして、車上装置40では、各検出器30による検出信号Fから検出しているスリット部11の種類を判定し、走行路3の特定位置に配置された特定種類のスリット部11の検出によって、列車5が該特定位置に位置していることを検出する。
(もっと読む)
計測装置用治具、計測装置及び計測方法
【課題】本発明は、短時間でフレームを計測することができる技術の提供を課題とする。
【解決手段】自動二輪車のフレーム11を支持する、計測装置用治具12であって、ヘッドパイプ20を上下から把持するヘッドパイプ把持部材16を備え、ヘッドパイプ20の端面59に当接する受け座61を有する抑え部材62と、受け座61の当接面81から水平に延ばした延長線82が抑え部材62の車幅方向の側面84と交わる部位に設けられ、フレーム11の側方から見ることができるターゲット64とを備えていることを特徴とする。
【効果】ターゲット64はヘッドパイプ20の端面59に対して同じ高さに配置され、このターゲット64をフレーム11の側方から見ることができる。フレーム11の車幅方向側面からの計測のみで、ヘッドパイプ20の歪みまで計測でき、計測を短時間で行うことができる。
(もっと読む)
エンジンマウント変位測定方法
【課題】計測器を用いて車両に対するエンジンマウントの変位を迅速且つ正確に測定できるエンジンマウント変位測定方法を提供する。
【解決手段】車両1を定盤11の上に配置して、車両1の車軸方向に基づいて車両基準の座標系P(x、y、z)を決定し、車両基準の座標系P(x、y、z)における計測器21、51の原点位置と、計測器基準の座標系Q(X、Y、Z)におけるエンジンマウントの三次元位置とを用いて所定の座標変換行列式により、車両基準の座標系P(x、y、z)におけるエンジンマウントの三次元位置を算出する。これにより、車両基準の座標系P(x、y、z)におけるエンジンマウントの変位を迅速且つ正確に測定することができる。
(もっと読む)
センシング方法
【課題】低コストでフレームの所定箇所の位置を求めることができるセンシング方法を提供すること。
【解決手段】センシング方法は、自動二輪車のフレーム10の測定点の位置を求める方法である。このセンシング方法は、測定装置60により、フレーム10の後方側から、このフレーム10の測定点の全てをセンシングする。この発明によれば、1台の測定装置60でフレーム10をセンシングできるから、システムを小型化でき、低コストとなる。
(もっと読む)
1 - 20 / 102
[ Back to top ]