
Fターム[2F069EE22]の内容
測定手段を特定しない測長装置 (16,435) | 補正;補償 (408) | 手段 (176) | 電気的 (146)
Fターム[2F069EE22]の下位に属するFターム
補正値、補正係数を記憶しておくもの (85)
Fターム[2F069EE22]に分類される特許
21 - 40 / 61
動き測定装置
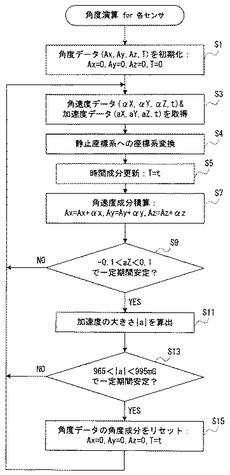
【課題】コンパクトな構成で精度の高い動き測定を行う。
【解決手段】動き測定装置として機能するPCのプロセッサは、角速度センサおよび加速度センサから角速度および加速度をそれぞれ繰り返し取得し、取得された角速度を積算していく。そして、取得された加速度が加速度条件を満足したとき、積算結果をリセットする。
(もっと読む)
基板処理装置及び基板処理装置の制御方法

【課題】基板の走査中に生じるヨーイング等の誤差を補正することができると共に、基板処理手段が基板の所定位置に精度よく処理を施すことができる基板処理装置等の提供。
【解決手段】基板Pを固定する基板保持部11を載置する、Y軸方向に離れた基板搬送部22a及び22cのベース構造体2上の位置を測定することによって、間接的に基板P上のY軸方向に離れた2箇所の位置のそれぞれと、ガントリ3とのX軸方向の距離を測定する位置測定ユニット13a及び13bと、位置測定ユニット13a及び13bが測定した2つの距離が異なる場合に、該2つの距離が同じになるように基板搬送部22a〜22dを制御する走査制御部5と、基板Pとガントリ3とのX軸方向の距離を測定する相対位置測定部29とを備え、ガントリ3に搭載されたヘッドユニット25は、相対位置測定部29が測定した距離に基づくタイミングで、基板Pにインク塗布を行う。
(もっと読む)
多点プローブの零点誤差関連値記録装置
【課題】多点プローブにおいて、複数のセンサのドリフトが生じた後の零点誤差の補償を容易に行うことができる多点プローブの零点誤差関連値記録装置を提供する。
【解決手段】
零点誤差関連値記録装置は試料を回転させるスピンドルと、複数の変位センサA,B,Cを含む真直形状測定用のセンサユニット220を試料の測定面に相対するように支持するセンサキャリッジ230を備える。試料が所定回転角度回転する毎に変位センサA,B,Cから、試料の測定面における同心円に沿う形状値f(rF,θ),f(r0,θ),f(rR,θ)及び零点誤差を含む測定値をCPU310が読取り、読取りした形状値及び零点誤差を含む測定値を記憶装置340に記憶する。
(もっと読む)
多点プローブの零点誤差の変動検出方法
【課題】複数のセンサのドリフトが生じた後の零点誤差の補償を容易に行うことができる多点プローブの零点誤差の変動検出方法を提供する。
【解決手段】
多点プローブの零点誤差の変動検出方法は、センサユニット220をスピンドルにて回転されている状態の試料の測定面に相対するように配置して、試料が1回転する間において、試料が所定回転角度回転する毎に複数の変位センサA,B,Cから出力される試料の測定面における同心円に沿う形状値及び零点誤差を含む測定値をCPU310に読取りさせて記憶装置340に記憶させる。記憶装置340が記憶した、同一の試料に関する新しい測定値と古い測定値とに基づいて、零点誤差の変動量を算出する。
(もっと読む)
ベルマウス模型の3次元計測を用いてベルマウスの図面を製作する方法
【課題】ベルマウス模型の3次元計測を用いることによって、ベルマウス図面の精密な製作と同時に図面製作時間の短縮を可能にするベルマウス模型を用いたベルマウス図面製作方法を提供する。
【解決手段】実際のベルマウスの模型の3次元計測を用いることによって実際のベルマウスの図面を製作する方法であって、実際のベルマウスから縮尺したベルマウス模型を複数の断面に分割するステップと、縮尺したベルマウス模型の複数の断面を複数の曲線で表示するステップと、複数の曲線の座標を計測するステップと、計測された座標を利用してベルマウス模型の複数の断面図を形成するステップと、断面図を拡大することによって実際のベルマウスの図面を製作するステップとを含む方法が提供される。
(もっと読む)
被測定面の測定方法
【課題】ピッチング誤差やローリング誤差を抽出でき高精度な測定を行える被測定面の測定方法を提供する。
【解決手段】被測定面を回転させる場合における回転軸線の振れに相当するティルトモーション誤差は、被測定面を高精度に測定する上で除去すべきでものである。従来技術によれば、かかるティルトモーション誤差を簡易に除去する方法がなかった、これに対し本発明によれば、前記被測定面を備えた部材を回転させながら、前記第1の2次元角度センサにより前記第1の測定点の面法線角度を2次元で測定し、前記第2の2次元角度センサにより前記第2の測定点の面法線角度を2次元で測定し、前記第1の2次元角度センサの測定値に基づいて、前記第2の2次元角度センサの測定値からティルトモーション誤差を排除することができる。
(もっと読む)
角度割り出し精度測定装置、及び角度割り出し精度測定方法
【課題】
回転移動軸の角度割り出し精度測定を容易し、測定時間の短縮とコストの削減を可能にする角度割り出し精度測定装置、及び角度割り出し精度測定方法を提供すること。
【解決手段】
エンコーダ11と、エンコーダ11の摺動抵抗の大きさに対応する外径形状と長さとを有する取付けシャフト12と、補正値を算出する演算部とを備えた角度割り出し精度測定装置10により回転移動軸13の角度割り出し精度を測定する。
(もっと読む)
伝達比可変機構用センサシステム及びこれを用いた操舵装置
【課題】起動時よりハンドルの操舵絶対角と、伝達比可変機構の副回転絶対角と、転舵輪の操向絶対角を簡単な構成で検出する伝達比可変機構用センサシステムを得る。
【解決手段】操舵ハンドル3と一体的に回転する第1のステアリングシャフト2の第1の所定角度毎に、第1の所定角度範囲内における絶対角を第1の絶対角センサ603により繰り返し検出し、副回転角が固定された状態で、操向車輪5を転舵する部材と一体的に回転する第2のステアリングシャフト4の第2の所定角度毎に、第2の所定角度範囲内における絶対角を第2の絶対角センサ703により繰り返し検出し、さらに副回転角の多回転成分を含む絶対角を副回転絶対角検出手段9により検出して、センサシステム起動時から、第1のステアリングシャフト2と第2のステアリングシャフト4の多回転分を含む絶対角を、3つのセンサで検出する。
(もっと読む)
情報処理プログラムおよび情報処理装置
【課題】加速度センサを備える装置の姿勢を正確に算出する。
【解決手段】コントローラは、所定の撮像対象を撮像するための撮像手段と、当該入力装置に加わる加速度を検出する加速度検出手段とを備えている。ゲーム装置は、撮像手段によって撮像された撮像画像に含まれる撮像対象の画像に関する当該撮像画像内における傾きに基づいて、撮像手段の撮像方向を軸とした回転に関するコントローラの傾きを第1の傾きとして算出する。さらに、ゲーム装置は、加速度検出手段によって検出された加速度に基づいて、撮像方向と異なる方向を軸とした回転に関する傾きを第2の傾きとして算出する。ゲーム装置は、第1の傾きおよび第2の傾きをコントローラの姿勢として用いて所定の処理を実行する。
(もっと読む)
センサのミスアラインメント検知および測定システム
ミスアラインメント検知センサアセンブリを提供し、これは、第1の軸に沿う検知方向を有する前方監視センサと、第1の軸と所定の関係にある第2の軸に沿う加速度を検知する慣性センサとを備えている。ミスアラインメント検知システムは、ミスアラインメント検知センサアセンブリと、信号処理システムとを用いて、第1の軸とセンサアセンブリの前方動作方向との間のミスアラインメント角度を計算する。前方監視センサアセンブリの角度ミスアラインメントを検知する方法についても開示し、本方法では、前方監視センサアセンブリの検知の軸と所定の関係を有する軸に沿う加速度を測定し、測定した加速度を所定の閾値と比較する。 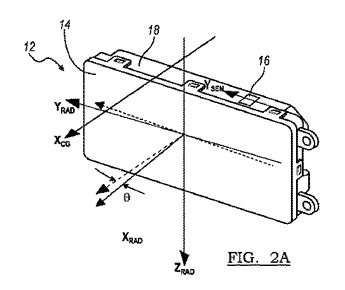 (もっと読む)
(もっと読む)
測長装置
【課題】ステージのガイドの真直度誤差、テーブルの運動誤差をリアルタイムで補正することができ、これらの誤差による形状測定への影響を最小限に抑えた高精度の形状測定を実現することができ、しかも構造が簡単で、比較的安価に実施できる形状測定用測長装置を提供する。
【解決手段】接触式又は非接触式のプローブを用い、測定物またはプローブのいずれかを可動テーブルに搭載して相対移動させることで、測定物を測長する装置において、端子を測長方向に沿う方向に向けて配置され、測定物をスキャンする第1のプローブと、端子を測長方向に沿う方向に向けて配置され、平面基準面をスキャンする第2のプローブと、前記第2のプローブからの測定情報と第1のプローブからの測定情報を処理して可動テーブルのガイドの真直度誤差および可動テーブルの運動誤差を補正する手段とを備えた。
(もっと読む)
ステージシステム及びステージシステムの補正方法
【課題】ステージの左右の歪みを短時間で補正する。
【解決手段】互いに平行となるように離間配置し、移動体2の対向する面に配された一対のガイド軸22,32と、ガイド軸22,32のうち一方のガイド軸22に設けられ移動体2の一側部2aを一方のガイド軸22に沿って移動させる第1の搬送機構20と、ガイド軸22,32のうち他方のガイド軸32に設けられ移動体2の他側部2bを他方のガイド軸32に沿って移動させる第2の搬送機構30と、移動体2の一側部2aを一方のガイド軸22に沿って基準位置まで移動させたとき、移動体2の他側部2bの所定位置からのずれ量を検出する検出部40とを備える。
(もっと読む)
測定装置、測定基準及び精密工作機械
【課題】本発明は平面形状の高精度測定を変位計の走査によって実現することを課題とする。
【解決手段】面上の半径rの円に沿う凹凸を変位計Dbの回転走査で測定するときに,回転中の軸方向の出入りを検出する変位計Daと,変位計Da,変位計Dbの測定点を結ぶ直径上の,半径Rの円に沿う走査測定をする変位計Dc,変位計Dd,合計4本を用意して,半径Rの円が描かれる面が回転走査軸と同心で,前記半径rの円に対して相対的に180度回転した位置にも反転設置できる基準円輪SC上にある形にし,基準円輪SCの反転操作の前後の回転走査における4本の変位計の出力から,合計6つを選んで用いることで,走査のための回転運動誤差と半径rの円と半径Rの円に沿う凹凸形状を分離同定する。この結果得られた円に沿う凹凸形状と,別の方法を用いて複数の直径上で得られた直線に沿う凹凸形状とを数学的に合成すると平面を正しく構成することが可能となる。
(もっと読む)
顔モデル作成システム
【課題】顔形状の特徴点からなるモデルを自動生成する。
【解決手段】正準化処理部112は、レンジファインダ100が取得したモデル化対象の顔(対象顔)の距離画像を、姿勢及び位置を正しく合わせる。2次元DPマッチング部114は、この距離画像と、標準顔パッチモデル距離画像122との画素同士の対応関係を、2次元DPマッチングにより求める。この対応関係に基づき、モデル変形部116が、標準顔パッチモデル126の各特徴点を対象顔の形状に合わせて移動させることで、標準顔パッチモデル126を変形して対象顔のパッチモデルを生成する。
(もっと読む)
取扱装置の工具の動きを追跡するための装置及び方法
【課題】 取扱装置の工具の動きを追跡するための装置及び方法を提供することである。
【解決手段】 取扱装置(2)の工具の動きを追跡するための装置(1)であって、上記工具に位置合わせされ、追跡されることができる少なくとも1つの方向性放射器(5)と、動きを決定するための信号評価装置(4)を有する装置(1)が記載される。上記方向性放射器(5)は固定された空間平面に対して調節可能な角度で方向性ビーム(6)を位置合わせさせるためのアクチュエーター、及び上記信号評価装置(4)に接続され、上記空間平面に対する現在の方向性ビームの角度を決定するための角度センサーを有する。
(もっと読む)
トンネルスペクトロスコピー装置
【課題】 本発明が解決しようとする問題点は、高い感度のトンネル電流検出部でトンネル電流を検出すると、探針−試料間に生じる浮遊容量による影響も大きく増幅されてしまい、測定結果が補正しきれない悪影響を受けてしまうという点である。
【解決手段】 試料に対向した探針と前記試料の間隔を固定した状態で、前記探針と前記試料間に印加するバイアス電圧を走引し、前記探針と前記試料間に流れるトンネル電流を検出して前記試料の局所領域の分析を行うトンネルスペクトロスコピー装置において、前記バイアス電圧の極性を反転して増幅し、それを微分した信号を前記トンネル電流に加算して、前記探針と前記試料間に生じる浮遊容量による影響を打ち消すよう構成したことを特徴としたトンネルスペクトロスコピー装置。
(もっと読む)
走査プローブ顕微鏡を用いた試料測定における測定条件設定方法
【課題】 走査プローブ顕微鏡を用いて、凹凸形状を有する試料(特に急峻なエッジを有する試料)を測定する際には、ユーザによる測定パラメータの設定により、測定形状に誤差が発生する場合がある。本発明は、ユーザの判断によって測定パラメータを設定することなく、容易に、適切な各測定パラメータを設定することができる手法を提供することを目的とする。
【解決手段】 本発明では、走査プローブ顕微鏡を用いた試料測定において、スキャン速度、フィードバックゲイン、接触力等の各測定パラメータを変化させて実際の測定対象を測定し、その測定形状から得られた特徴量を用いて適切な測定パラメータを設定する。
(もっと読む)
ホイ−ルアライメント測定方法およびその測定装置
【課題】 例えば前輪のト−角測定および調整に好適で、車両のステアリング機構によるヒステリシス情報を基にアライメントを測定し、実際のアライメント状態に合致した正確なアライメント情報を得られるとともに、測定値のバラツキを低減し、測定値の再現性の向上を図れる、ホイ−ルアライメント測定方法およびその測定装置を提供すること。
【解決手段】 水平面と平行に回動可能なロ−ラフレ−ム32に設けた複数のロ−ラ33に車輪34を載置する。
前記車輪34のアライメントを測定するアライメント測定方法であること。
前記ロ−ラフレ−ム32を、被検車両のステアリング機構のヒステリシス位置情報を基に所定角度回動する。
ロ−ラフレ−ム32の前記回動位置でアライメントを測定する。
(もっと読む)
ホイ−ルアライメント測定方法およびその測定装置
【課題】 例えば前輪のト−角測定および調整に好適で、車両のステアリング機構によるヒステリシス情報を基にアライメント測定し、実際のアライメント状態に合致した正確なアライメント情報を得られるとともに、簡単な構成によって測定値のバラツキを低減し、測定値の再現性の向上を図れる、ホイ−ルアライメント測定方法およびその測定装置を提供すること。
【解決手段】 水平面と平行に回動可能な複数のロ−ラ20に車輪21を載置する。
前記車輪20のアライメントを測定するホイ−ルアライメント測定方法であること。
前記車輪20に連係するステアリングホイ−ル28を、そのステアリング機構のヒステリシス位置情報を基に所定角度回動する。
前記ステアリングホイ−ル28の所定角度回動位置でアライメント測定する。
(もっと読む)
移動体の高精度姿勢検出装置
【課題】 移動体に搭載した慣性センサ出力の中から移動体の姿勢演算に不要な慣性成分を除去して、移動体の姿勢検出を精度良く検出することのできる移動体の高精度姿勢検出装置を提供する。
【解決手段】 移動体の高精度姿勢検出装置は、移動体に、当該移動体の慣性を検出する慣性検出手段と、当該移動体の動作を生成する動作生成手段と、姿勢演算を行う演算処理手段を備え、演算処理手段により慣性検出手段の出力と動作生成手段の出力に基づき移動体の姿勢を高精度に検出する。
(もっと読む)
21 - 40 / 61
[ Back to top ]