
Fターム[2F069FF07]の内容
測定手段を特定しない測長装置 (16,435) | 較正;調整 (143) | 較正に用いる標準 (86)
Fターム[2F069FF07]に分類される特許
21 - 40 / 86
重心測定システムおよび重心測定方法
【課題】被測定物の重心位置を正確に把握することができる重心測定システムおよび重心測定方法を提供する。
【解決手段】被測定物を載置する載置台、プローブ12およびこれらを三次元方向へ相対移動させる相対移動機構13を有し、被測定物の形状を測定する三次元測定機10と、載置台の重心位置を測定する重心測定装置20と、三次元測定機の座標系と重心測定装置の座標系とを一致させるとともに、三次元測定機によって測定された被測定物の形状データに、重心測定装置で測定された重心位置を合成するデータ処理装置30とを備える。
(もっと読む)
改良された関節式アーム
関節式アームCMMは、複数の伝達部材と、少なくとも2つの伝達部材を互いに接続する複数の関節部材と、遠端における座標取得部材と、近端におけるベースとを備える。関節部材の少なくとも2つは、少なくとも1つのエンコーダを備えることが可能であり、少なくとも2つのエンコーダは、ともに、単一のモノブロックハウジング内に収容されることが可能である。 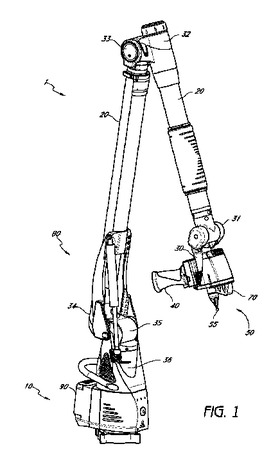 (もっと読む)
(もっと読む)
形状測定装置

【課題】凹状のゲージを用いた形状測定装置の校正の精度の低下を防止する。
【解決手段】形状測定装置のステージの上面に設けられているゲージは、形状測定装置の校正に用いる凹球面状の凹部と、凹部の底から垂直に突出するように設けられている送風部材52により構成される。送風部材52の送風部52Aの下面には、下面の外周に沿って、送風口61−1乃至61−nが所定の間隔で配置されている。形状測定装置の電源が投入されている間、常にこの送風口61−1乃至61−nから凹部の表面に向かって風が吹き出され、凹部の表面の埃などの異物が吹き飛ばされる。本発明は、例えば、被検物の3次元形状を測定する形状測定装置に適用できる。
(もっと読む)
関節プローブヘッド
【課題】関節プローブヘッドの回転軸をロックするためのブレーキを提供する。
【解決手段】支持体に取り付くための第1のマウントと、表面検出装置が取り付け可能な第2のマウントとを備え、第2のマウントが第1のマウントに対し一以上の軸回りに回転可能である関節プローブヘッドにおいて、第1のマウントに対する第2のマウントの一以上の軸回りの位置をロックするための少なくとも一以上の機械式ブレーキが設けられ、これにより、少なくとも一つの位置測定装置が、ロック位置において、第1のマウントに対する第2のマウントの一以上の軸回りの位置を決定すべく設けられる。
(もっと読む)
校正装置及び真直形状測定装置
【課題】3点法プローブのゼロ点校正を3点法の環境に対するロバスト性を維持しながら、迅速に、精度よく、かつ簡便に実現できる校正装置及び真直形状測定装置を提供する。
【解決手段】校正対象となる3つの変位センサSS1〜SS3を円板CP1〜CP3に対して相対的に固定し、回転角θ=0度において3つの円板CP1〜CP3の円周を、各変位センサセンサSS1〜SS3を用いて測定して第1の測定値を求め、且つ回転角θ=180度において3つの円板CP1〜CP3の円周を、変位センサセンサSS1〜SS3を用いて測定して第2の測定値を求め、第1の測定値と第2の測定値とに基づいて、前記変位センサを校正できる
(もっと読む)
センサホルダ及びセンサ支持装置
【課題】棒状のセンサホルダに取り付けた3つのセンサにおける鉛直方向の位置ズレを抑制する。
【解決手段】予め決められた孔HL1〜HL3にセンサSS1〜SS3を固定して検出軸方向を鉛直方向に向けた時の、センサホルダSHのたわみ量は、2点支持の梁の集中質量と分布質量を考慮して計算できるので、3つのセンサSS1〜SS3の固定位置の重力によるたわみが等しくなる位置が定まるため、孔HL1〜HL3にセンサSS1〜SS3を配置するのみで、センサSS1〜SS3の鉛直方向のズレがゼロとなる。これにより精度の良い測定が可能となる。
(もっと読む)
形状測定装置
【課題】長尺大面積の直線形状や、面形状の測定における逐次3点法の零点調整を、工作機械やそれに類似する測定システム上に簡便に実現することができ、反転法と異なり長尺の被測定物の被測定対象面を置き直すことがなく測定ができる形状測定装置を提供する。
【解決手段】
形状測定装置は、変位センサ41〜43の検出感度軸方向Kが水平面に含まれるとともに互いに反対方向となる第2姿勢位置D2及び第3姿勢位置D3、及び水平面と直交する鉛直方向に向ける第1姿勢位置D1を取り得るようにホルダ38を回転自在に支持する姿勢可変機構を備える。形状測定装置は基準幅直定規を変位センサ41〜43の配列方向を走査方向として、該走査方向に走査測定することで得られる幅真直形状と基準幅直定規の校正値を比較することで変位センサ41〜43の零点調整誤差を算出し、被測定物の断面形状を逐次3点法で測定して、零点調整誤差に基づき校正する。
(もっと読む)
形状測定装置
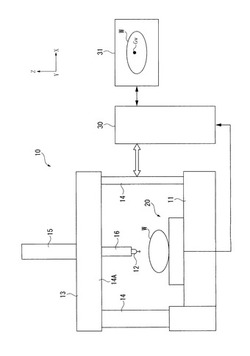
【課題】被測定物体の形状を高精度に測定することができる形状測定装置を提供する。
【解決手段】形状測定装置100を、被測定物体15の形状を測定して検出値を出力するプローブ12と、所定の空間内でプローブ12を移動可能に保持する保持機構部(アーム部11)と、プローブ12を移動させて、プローブ12により検出された被測定物体15の検出値及びアーム部11の位置情報から測定値を算出する制御部20と、互いの距離の真値が既知の複数の基準器31と、基準器31間の距離をプローブ12で測定し、基準器31間の距離の測定値と基準器31間の距離の真値とから、この測定値が真値に一致するように補正する演算部32と、から構成する。
(もっと読む)
ガラス条の反り測定方法およびガラス条の製造方法
【課題】母材ガラス板を加熱延伸しながらガラス条の反りを測定できるガラス条の反りの測定方法およびこれを用いたガラス条の製造方法を提供すること。
【解決手段】加熱延伸装置を用いて母材ガラス板を加熱延伸しながら、該延伸して形成したガラス条の幅方向の中心および両端部近傍を含む少なくとも3点において該ガラス条の表面および裏面の相対位置を検出し、該検出した相対位置に基づいて前記ガラス条の反りを測定する。好ましくは、前記ガラス条に向かって光を照射し、該ガラス条の表面および裏面からの前記光の反射光を測定することによって、前記相対位置を検出する。
(もっと読む)
高温用基準ワーク及びこれを用いた高温物寸法計測用形状計測器の精度検証方法
【課題】熱間鍛造等のような高温環境において寸法計測の基準ワークとして使用できる高温用の基準ワーク、及び同基準ワークを用いた高温物寸法計測用形状計測器の精度検証方法を提供する。
【解決手段】半円形断面形状が一定間隔で一方向に複数個並設された、熱膨張係数が既知で耐酸化性を有する高融点の金属材により高温用の基準ワークを得る。この基準ワークの熱膨張係数と半円形断面形状並設方向の表面形状の寸法の常温での測定値とから検証目標高温時での上記表面形状の寸法を理論値として求めておく。同基準ワークを検証目標高温まで加熱し、その際の上記表面形状の寸法を精度検証対象である非接触型の形状計測器により計測し、上記表面形状中の複数の半円形断面形状について円形状のフィッティング処理を行い、上記表面形状の寸法を実測値として求める。この実測値と上記理論値との比較値を得て高温物寸法計測用の上記形状計測器の精度を検証する。
(もっと読む)
校正用円環状部品、軸部品、軸受及びこれらの製造方法
【課題】測定機の測定速度を自由に設定でき、この測定機の暗振動も考慮した校正を行える校正用円環状部品を、低コストで得られる構造及びその製造方法を実現する。
【解決手段】円環状素材14に、所定の数の凸部12、12を有するスプライン軸11を圧入する事により、この円環状素材14の外周面にこれら各凸部12、12に対応する数の凹凸を形成する。そして、この外周面に研磨加工を施す事により、これら各凹凸を除去してこの外周面をほぼ円筒面とする。その後、上記円環状素材14をこのスプライン軸11から抜き取る事により、測定面である外周面に、所定の大きさの振幅を有し、上記各凹凸に対応する数の凹凸を、互いに滑らかに連続した状態で形成して、上記校正用円環状部品を得る。これにより、上記課題を解決する。
(もっと読む)
角度割り出し精度測定装置、及び角度割り出し精度測定方法
【課題】
回転移動軸の角度割り出し精度測定を容易し、測定時間の短縮とコストの削減を可能にする角度割り出し精度測定装置、及び角度割り出し精度測定方法を提供すること。
【解決手段】
エンコーダ11と、エンコーダ11の摺動抵抗の大きさに対応する外径形状と長さとを有する取付けシャフト12と、補正値を算出する演算部とを備えた角度割り出し精度測定装置10により回転移動軸13の角度割り出し精度を測定する。
(もっと読む)
ステレオビジョンプローブシステムの包括的校正方法
【課題】フレーム歪み誤差と並んでプローブ形状誤差をも校正できるステレオビジョンプローブシステムの包括的校正方法を提供する。
【解決手段】ステレオビジョンプローブシステム120は、タッチプローブ140に形成されたマーカパターン150を複数のカメラ130A,130Bで撮影し、三角法演算を行ってタッチプローブ座標位置を測定する。包括的校正システム100において、フレーム歪み校正は、可搬式の校正治具160にタッチプローブ140を設置して三角法演算を行う反復工程を含むが、タッチプローブ140のプローブ形状歪み誤差に影響されない。プローブ形状歪み校正にはフレーム歪み校正の結果が適用される。同一のプローブチップが包括的校正ルーチンの全体を通じて用いられる場合、プローブチップ校正はフレーム歪み校正により用いられる画像セットからの画像を用いる。
(もっと読む)
情報処理装置、情報処理方法
【課題】 第1の座標変換情報、第2の座標変換情報の概略値を外部から入力することなく、より簡便かつ確実に校正情報を取得する為の技術を提供すること。
【解決手段】 校正情報算出部540は、第2の座標変換情報の複数の候補と、センサ計測値と、世界座標系におけるビデオカメラ100の位置及び姿勢とを用いて、第1の座標変換情報の候補を複数求める。そして、求めた複数の候補を統合して1つの第1の座標変換情報を求める。そして、第2の座標変換情報の候補と、第1の変換情報とを校正情報の初期値とし、校正情報を補正する為の繰り返し演算を行う。
(もっと読む)
新校正方法を使った形状精度の改良
【課題】半導体ウェーハの形状計測装置の系統的誤差を判定する。
【解決手段】ウェーハを計測器に対して角度を変えながらその表裏面を計測してセンサデータを収集し、表裏データセットを作る。ウェーハ角度に対して裏側データを表側データから差し引いて二分する事によって、各角度のウェーハ形状の平均を求める。また表裏データを加えて二分することにより各角度における計測シグネイチャを求める。対称的修正値は各角度における計器シグネチャ全てを平均する事によって計算され、該対称的修正値を計測の時と同じ角度毎に引き算し、校正されたウェーハデータセットを生ずる。ウェーハ平均値を、これらの校正ウェーハ形状計測値を平均する事によって計算し、該ウェーハ平均値を修正された形状計測値から差し引いて、それぞれの角度における形状残余マップを作る。残余を平均して非対称性誤差を算出し、対称性誤差と加算して系統的誤差を求める。
(もっと読む)
基準位置校正治具、外形測定装置、外観検査装置、測定対象物保持装置、基準位置校正方法、外形測定方法、及び外観検査方法
【課題】本発明は、接触式の測定装置と、撮像装置を用いた測定装置との間で、両者間の基準位置の校正を正確且つ容易に実行できる、基準位置校正治具、外形測定装置、外観検査装置、測定対象物保持装置、基準位置校正方法、外形測定方法、及び外観検査方法を実現する。
【解決手段】本発明による基準位置校正治具は、測定対象物に接触して形状を測定する接触式形状測定装置、及び測定対象物の画像を取得して形状を測定する画像認識形状測定装置において基準位置を校正するための基準位置校正治具であって、平坦面と、当該平坦面に形成されており、当該平坦面に垂直な周縁壁を有する円形の凹部又は円柱と、を備える。外形測定装置、外観検査装置、測定対象物保持装置は、当該基準位置校正治具を備える。基準位置校正方法、外形測定方法、及び外観検査方法は、これらの基準位置校正治具、外形測定装置、外観検査装置、又は測定対象物保持装置を用いる。
(もっと読む)
運動誤差測定基準及び運動誤差測定装置
【課題】ピッチング誤差やローリング誤差を抽出でき高精度な測定を行える運動誤差測定基準、運動誤差測定装置を提供する。
【解決手段】運動誤差測定基準は、例えばベースに対して所定の方向に移動可能に支持されたステージの運動誤差を求める測定装置で利用することが出来るものであり、前記母線に沿って前記原点からの距離が既知である所定点において、実際の物体面と、母線が構成すべき数学的理想面との差が、面外への微小変位と、面法線の方向の微小角変位に関して校正されており、その校正値が記憶されて演算に供しうる数値データとして付与されているものである。
(もっと読む)
測定器を使って工具を測定する方法、及び工具を測定するための測定器を有する測定装置
【課題】従来における不都合を低減もしくは完全に回避できる測定方法及び測定装置を提供する。
【解決手段】少なくとも1回の測定を行うために、工作機械におけるスピンドルの移動によって、測定器(3)をスピンドルマウントとは異なる工作機械上の測定位置に一時的に配置させる。
(もっと読む)
測定装置、測定基準及び精密工作機械
【課題】本発明は平面形状の高精度測定を変位計の走査によって実現することを課題とする。
【解決手段】面上の半径rの円に沿う凹凸を変位計Dbの回転走査で測定するときに,回転中の軸方向の出入りを検出する変位計Daと,変位計Da,変位計Dbの測定点を結ぶ直径上の,半径Rの円に沿う走査測定をする変位計Dc,変位計Dd,合計4本を用意して,半径Rの円が描かれる面が回転走査軸と同心で,前記半径rの円に対して相対的に180度回転した位置にも反転設置できる基準円輪SC上にある形にし,基準円輪SCの反転操作の前後の回転走査における4本の変位計の出力から,合計6つを選んで用いることで,走査のための回転運動誤差と半径rの円と半径Rの円に沿う凹凸形状を分離同定する。この結果得られた円に沿う凹凸形状と,別の方法を用いて複数の直径上で得られた直線に沿う凹凸形状とを数学的に合成すると平面を正しく構成することが可能となる。
(もっと読む)
リソグラフィ装置、キャリブレーション方法、デバイス製造方法、およびコンピュータプログラム
【課題】
リソグラフィ装置におけるレベルセンサまたは高さセンサのキャリブレーションのための改良方法を提供する。
【解決手段】レベルセンサによって得られる基板位置測定のプロセス依存性を低減させるべく、複数のレベルセンサデバイスにおける測定値間の差を補い、かつ前記基板の特性に対応する、前記レベルセンサシステムについての少なくとも1つのキャリブレーション値を取得することと、少なくとも1つのキャリブレーション値に基づき、前記複数のレベルセンサデバイスを用いて、基板の表面の位置を測定する。
(もっと読む)
21 - 40 / 86
[ Back to top ]