
Fターム[2F069GG56]の内容
測定手段を特定しない測長装置 (16,435) | 測定方式 (4,762) | 他の物理量と組み合わせるもの (49)
Fターム[2F069GG56]に分類される特許
21 - 40 / 49
真直度測定装置
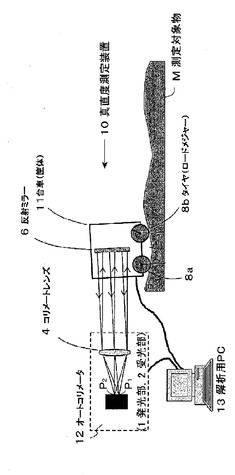
【課題】真直度を効率よく測定することができる真直度測定装置を提供すること。
【解決手段】本発明の真直度測定装置10は、被測定物M上を自走可能であり反射ミラーを載置した筐体11と、筐体11とは別に設置されたオートコリメータ12と、筐体11の走行距離データ、及びオートコリメータ12からの傾斜データを処理し被測定物Mの真直度を算出する解析用コンピュータ13とを備えている。筐体11は、その底面側にタイヤ8a、8bを有し、タイヤ8bの回転によって筐体11の走行距離が求められ、その走行距離は解析用コンピュータ13に入力されて被測定物M上における筐体11の位置が算出される。
(もっと読む)
ロール角推定装置、及び電動パワーステアリング装置

【課題】一般乗用車に装備されやすいセンサを利用し、車体のロール角φを高精度に推定する。
【解決手段】例えばマルチ荷重センサ12により、左右輪に作用する垂直荷重WL及びWR、並びに横力FL及びFRを検出する。そして、左右輪に作用する垂直荷重WL及びWRに応じて、左右輪の荷重移動量ΔWを算出し、この荷重移動量ΔW、並びに横力FL及びFRに応じて、車体のロール角φを推定する。より正確に車体のロール角φを推定したければ、横力における、車輪進行方向に対する直角方向成分、つまりコーナリングフォースFcFL〜FcRRを用いる。
(もっと読む)
測定装置
【課題】長尺の断面直線形状や面形状の測定における水準器と多点法の利点だけを有効に使い、大面積の被測定面を迅速に高精度に測定できる測定装置を提供する。
【解決手段】被測定試料の置かれたステージと多点法プローブを保持するセンサホルダが互いに相対的に移動をして直線形状を走査測定する装置において、移動する側のセンサホルダまたはステージの走査方向の傾斜角を測定することの出来る水準器を備えていて、前記水準器によって走査移動の開始点と終了点での前記移動側物体の傾斜を測定することで、多点法プローブのゼロ点調整誤差をその場校正する。
(もっと読む)
床面検出システム、移動ロボット及び床面検出方法
【課題】正確に床検出を行うことが可能な床面検出システム、移動ロボットや床面検出方法を提供すること。
【解決手段】本発明にかかる床面検出システムは、移動ロボット1に設けられている。まず、姿勢角センサ13の検出した姿勢角データに基づいて複数のセンサ角度候補を設定する。次に、複数のセンサ角度候補のそれぞれについて距離画像センサ12の検出した距離画像データに基づいて床検出を行う。そして、複数のセンサ角度候補のうち、最も多く床検出された候補を、当該床面に対する距離画像センサの角度として選択する。
(もっと読む)
モーショントラッカ装置
【課題】 カメラ装置に設定された相対座標系に対する、頭部装着型表示装置付ヘルメット等の対象物の現在位置及び現在角度を、精度よく測定することができるモーショントラッカ装置を提供する。
【解決手段】 カメラ装置2と、光学マーカー7の現在位置である光学マーカー位置情報を算出する光学マーカー位置情報算出部24とを備えるモーショントラッカ装置1であって、対象物角速度センサ14と、対象物加速度センサ15と、対象物速度算出部25と、光学マーカー位置情報が、3個以上の光学マーカー7の現在位置を含むときには、第一相対情報算出部22で相対情報を算出し、光学マーカー位置情報が、1個以上3個未満の光学マーカー7の現在位置を含むときには、第二相対情報算出部23で相対情報を算出し、光学マーカー位置情報が、全く光学マーカーの現在位置を含まないときには、第三相対情報算出部26で相対情報を算出する切替部29とを備える。
(もっと読む)
液体膜厚さ測定装置、液体膜厚さ測定方法およびニップ調整方法
【課題】シンプルな構成により、ローラの表面に形成される液体膜の厚さが当該ローラの幅方向において均一であるか否かを簡易にかつ精度良く測定することができる液体膜厚さ測定装置および液体膜厚さ測定方法を提供する。また、前述のような液体膜厚さ測定方法を利用することにより、オフセット印刷機における一対のローラ間のニップ調整を簡易にかつ精度良く行うことができるニップ調整方法を提供する。
【解決手段】渡しローラ11等のローラの表面にブレード24を押し当てた状態でローラを一定時間回転させる。このことによりローラの表面に形成された水膜をブレード24により掻き取る。この掻き取られた水の質量または体積に基づいて、ローラの表面に形成される水膜の厚さが当該ローラの幅方向において均一であるか否かを測定する。
(もっと読む)
較正ユニットを使った動作追跡のためのシステムと方法
【課題】身体部分上の方位測定ユニットの方位と、関節によって相互接続された連続体を構成する身体部分同士の間の相対比率に関するデータを提供する較正段階が高精度で行われる動作追跡のためのシステムと方法を提供する。
【解決手段】個々の寸法と相互比率を有し、関節により順次相互接続される複数の物体部分で構成される物体の三次元空間内の運動を追跡するシステムが、方位パラメータを有する各物体部分と位置的及び方位的関係に配置され、物体部分の方位に関するデータを測定する方位測定ユニットと、方位測定ユニットから受け取ったデータを使って物体部分の方位及び/又は位置情報を導き出すモジュールと、受け取ったデータ、所定の制約、及び追加入力データに基づいて物体部分の相互比率と方位測定ユニットの方位パラメータを求めるために、受け取ったデータと所定の制約に基づき較正値を計算する較正ユニットとを備えるプロセッサとを備える。
(もっと読む)
有水式ガスホルダの傾斜測定装置及び有水式ガスホルダの傾斜測定方法
【課題】安価な測定装置を用いて外部の環境によらず安定的にガス槽の傾斜を測定できる有水式ガスホルダの傾斜測定装置を提供すること。
【解決手段】水槽と第1〜第3基柱と昇降自在に設けられたガス槽41を備える有水式ガスホルダの傾斜測定装置10を提供する。この傾斜測定装置10は、ガス槽41に対して同一の相対高さで連結された第1〜第3被検知体と、第1基柱の第1高さに配置され第1被検知体の通過を検知する第1センサ11Aと、第1基柱〜第3基柱の第2高さにそれぞれ配置され、対応する第1被検知体〜第3被検知体の通過を検知する第2〜第4センサ11B〜11Dと、ガス槽が上昇又は下降するときに、第1センサ11Aと第2センサ11Bとの検知タイミングの時間差と、第2〜第4センサ11B〜11Dによる検知タイミングと、に基づいてガス槽41の傾斜を算出する傾斜算出手段13と、を含む。
(もっと読む)
摺動部品の加工精度計測装置
【課題】 摺動穴部品と摺動軸部品との摺動抵抗から摺動部品の加工精度を計測する加工精度計測装置を提供することを目的とする。
【解決手段】 摺動穴部品1と該摺動穴部品1の中に摺動自在に嵌装される摺動軸部品2の加工時における加工精度計測装置において、摺動穴部品1と摺動軸部品2のいずれか一方を駆動して互いを摺動させる駆動手段(電動機3、動力伝達手段4および電源5)と、駆動手段が供給する動力を計測する動力計測手段6と、摺動穴部品1と摺動軸部品2の相対位置を計測する位置計測手段とを備え、動力計測手段6により得られる動力計測値から摺動穴部品と摺動軸部品とが摺動するときの摺動抵抗値を算出し、摺動抵抗値と位置計測手段による相対位置計測値とから加工精度を計測することを特徴とする。
(もっと読む)
部品の自重を取得して可撓性部品の輪郭のズレを取得する装置およびその方法
部品12を支点8〜11において収容するスタンプ領域6を形成するために、ベース領域1上に配列された複数のスタンプ2〜5を用いて、部品の自重を取得し、可撓性部品12、特に、大面の金属板の、所望の輪郭と実際の輪郭との間のズレを取得するための方法および装置であり、各スタンプ2〜5は、支点において作用する重量(力)Fmを測定するための少なくとも1つの力測定センサ18〜21と、各スタンプ2〜5によって移動された移動経路Smを測定するための少なくとも1つの距離測定センサ(14−17)と備える。 (もっと読む)
姿勢角検出装置及び姿勢角検出用プログラム
【課題】 測定対象部分の動きに拘らず、その姿勢角を正確に測定可能にすること。
【解決手段】 測定対象部分の回転角速度を検出するジャイロセンサ12と、前記測定対象部分における直交二方向の加速度をそれぞれ検出する加速度センサ13と、ジャイロセンサ12及び加速度センサ13からの検出値に基づいて、前記測定対象部分の姿勢角を演算する演算手段15とを備えて姿勢角検出装置10が構成されている。演算手段15は、ジャイロセンサ12の検出値から、所定周波数以上の高周波成分における対象方向の回転角度を求める角速度処理部17と、加速度センサ13の検出値から、所定周波数未満の低周波成分における前記対象方向の回転角度を求める加速度処理部18と、これら角速度処理部17及び加速度処理部18で求めた各回転角度を加算して前記姿勢角を求める姿勢角決定部20とを備えている。
(もっと読む)
路面性状測定装置
【課題】一台でキメ深さやIRIを測定できる多機能の路面性状測定装置であって安価かつ高精度なものを車載可能とすべく、移動距離計の測定値からタイヤ変形等の悪影響が取り除かれるようにする
【解決手段】車両に移動距離計15と高さ計16と高さ計51と演算部20とを搭載する。高さ計16,51には、排水用凹部の開口幅より短い第一基準長Nに対応した狭い範囲を測定するものを、採用する。演算部20は、移動距離測定値ΔSと高さ測定値K,Jとに基づき踏面算出を行って第二基準長M対応のIRIを算出し、移動距離測定値ΔSと高さ測定値Kとに基づき踏面算出を行わないで第一基準長N対応のキメ深さ等を算出し、更に基準長Mだけ離れた高さ計16,51での路面形状について相関を算出して選択的に移動距離測定値ΔSを校正する。
(もっと読む)
柔軟なセンサ部位を用いたすべり・転がり検出システム及び検出方法
【課題】 柔軟性を有する材料をセンサ部位に用いて、被測定物Mの変位がすべりによるか転がりによるかを判別可能なすべり・転がり検出システム及び検出方法を提供する。
【解決手段】 圧力により透過光量が変化する複数の感圧部p1を面内に配置した第1のセンサアレイ21と、第1のセンサアレイ21上に重ねて設けられ、圧力により透過光量が変化する複数の感圧部p2を面内に配置した第2のセンサアレイ22とでセンサ部位2を構成し、被測定物Mが第2のセンサアレイ22上で変位した時に、光検出器3で検出された第1のセンサアレイ21の各感圧部p1における圧力の変化と第2のセンサアレイ22の各感圧部p2における圧力の変化に、時間的差異又は空間的差異が見出された場合に被測定物Mの変位がすべりによると判定し、差異が見出されなかった場合に被測定物Mの変位が転がりによると判定する。
(もっと読む)
レースタイヤ摩耗予測方法及びレースタイヤ摩耗予測用コンピュータプログラム、並びにレースタイヤ摩耗予測装置
【課題】より正確にレース走行中のタイヤ摩耗予測を行うこと。
【解決手段】レース走行をする車両5に、処理部11と記憶部12とを有する制御部10を搭載する。また、処理部11には、表示モニタ17と入力部16と走行状態検出センサ15を接続し、さらに、タイヤ20の近傍に設けられた撮像部31を有する画像解析装置30を接続する。記憶部12では、入力部16からの入力によりレース走行前に摩耗データを記憶する。また、画像解析装置30で、レース走行中のタイヤ摩耗状態情報を取得し、走行状態検出センサ15によって走行状態を検出する。処理部11では、これらの情報と記憶された摩耗データとを演算してタイヤ摩耗速度を予測する。従って、レース走行中における走行状態に応じた、当該レース走行時のタイヤ20の摩耗予測をすることができる。この結果、より正確にレース走行中のタイヤ摩耗予測を行うことができる。
(もっと読む)
ゴムホースのワイヤの巻付けピッチの検査方法および検査装置
【課題】ゴムホースの成形において構成部材としてスパイラル状に巻付けられるワイヤの巻付けピッチを容易に精度よく検査でき、検査作業の軽減および品質の向上を図ることが可能なゴムホースのワイヤの巻付けピッチの検査方法および検査装置を提供する。
【解決手段】ワイヤ10がスパイラル状に巻付けられる位置C1と、このワイヤ10の外側に層間ゴム13が巻付けられる位置C2との間に配置したセンサ2で、移動するスパイラル状に巻付けられたワイヤ10を検知して検知信号を発信し、検知信号とマンドレル14の移動速度とに基づいてデータ処理装置7がワイヤ10の巻付けピッチを算出するとともに、算出したピッチと、予めデータ処理装置7に登録されている所定ピッチとの比較結果がモニター8に表示される。
(もっと読む)
身体組成測定装置
【課題】被験者による入力の煩雑さを軽減することのできる身体組成測定装置を提供すること。
【解決手段】被験者の身体の複数の所定の部位に対応付けて接触させるための複数の電極11〜18と、被験者の手で保持可能な保持部2と、保持部2に一端が接続されるケーブル3と、被験者の足を載置可能な載置部1とを備え、引出量検出部により検出された引出量および角度検出部で検出された角度に基づいて、被験者の所定の身体部位の部位長を計算するための部位長計算部101と、複数の電極11〜18を用いて、所定の身体部位のインピーダンスを計測するためのインピーダンス計測部102と、部位長計算部101で計算された所定の身体部位の部位長と、インピーダンス計測部102で計測されたインピーダンスとに基づいて、所定の身体部位の身体組成を算出するための体組成算出部とを備える。
(もっと読む)
面形状計測方法、姿勢計測方法、及び露光方法
【課題】 移動体としてのステージ自体に歪みが生じていてもステージの位置検出精度を向上させることができる面形状計測方法等を提供する。
【解決手段】 レーザ干渉計13を用いてウェハステージWSTに設けられた移動鏡12のZ軸に対する傾きを計測し、この計測結果に基づいてZ軸に対する移動鏡12の傾きが零となるようにウェハステージWSTの姿勢を制御し、多点フォーカス位置検出系21を用いてこのときのウェハステージWSTの姿勢を計測する。以上の処理を計測対象の移動鏡12の鏡面に沿ってウェハステージWSTを微小移動させながら繰り返す。
(もっと読む)
非球面偏心測定方法及び非球面偏心測定装置
【課題】容易に姿勢調整が可能であり、迅速に測定できる非球面偏心測定装置等を提供すること。
【解決手段】非球面レンズ101を保持するレンズホルダ110と、保持する吸着力を制御する吸着力可変機構114と、レンズホルダ100を回転軸120の周りに回転させるモータ112等と、その回転角を検出するエンコーダ113と、非球面102、103からの反射光によるスポットの軌跡を検出するスポット軌跡検出部115と、非球面102、103の形状を測定する形状測定部117、118と、スポット軌跡検出部115と形状測定部117等とエンコーダ113との各検出結果に基づいて、非球面偏心を演算する演算部119とを有し、吸着力可変機構114は、レンズホルダ110上で非球面レンズ101の姿勢調整が可能な第1の吸着力と、第1の吸着力よりも大きな第2の吸着力とに制御する。
(もっと読む)
電機子コアの検査方法及び検査装置
【課題】 容易且つ高精度に形状公差を検査することが可能な電機子コアの検査方法を提供すること。
【解決手段】 波形計測部15は、各コアシートの切断面、詳しくはその厚み方向において異なる複数の計測箇所に臨むように各々配置された複数のセンサ2の出力する各波形信号Sa〜Scに基づいて、各計測箇所における各々の凹凸変化を示す複数の計測データDa〜Dcを生成する。演算部16は、波形計測部15から入力された各計測データDa〜Dcをそれぞれ予め設定された複数の区間に区分し、その各区間毎に破断部に起因するノイズ成分の有無を判定することにより、その有効/無効を評価する。そして、かかる評価に基づいて各区間毎の有効な区間データを抽出し、その各区間データを合成することにより破断部に起因するノイズを含まない検査データDtを生成する。
(もっと読む)
タンク底板の板厚測定装置
【課題】 タンク底板鋼板の板厚の測定をより効率的に行うこと。
【解決手段】 タンク底板の板厚を測定する板厚測定装置Aであって、板厚測定装置Aの筐体1には、装置Aを車輪を用いて走行させる走行機構10と、超音波探触子22及び渦流型センサ23を搭載してタンク底板の情報を取得するための測定台車20と、測定台車20から得た情報を演算処理する演算手段30と、演算手段30により得た情報を表示する表示手段50と、超音波探触子22に対して接触媒質を供給する接触媒質供給手段60と、上記各手段に電源を供給する電源供給手段70と、を一体的に有することを特徴とする。
(もっと読む)
21 - 40 / 49
[ Back to top ]