
Fターム[2F069GG63]の内容
測定手段を特定しない測長装置 (16,435) | 測定方式 (4,762) | 測定子の数 (697) | 2つ (150)
Fターム[2F069GG63]に分類される特許
121 - 140 / 150
マルチプローブを用いた変位量測定装置及びそれを用いた変位量測定方法
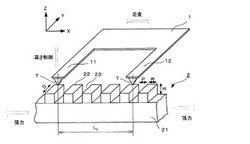
【課題】 微小試験片に張力を加えた際の変位量を高精度に測定することができる変位量測定装置及び変位量測定方法を提供すること。
【解決手段】先端部にチップ(T)が形成された第1及び第2カンチレバー(11、12)を有するマルチプローブ(1)と、第1及び第2カンチレバー(11、12)の形状変化を検出する検出部と、マルチプローブ(1)を走査させるスキャナと、スキャナを制御する制御部と、試験片(2)に張力を加える引張機構とを備えた変位量測定装置であって、複数の凸部(22)が等間隔に表面に形成された試験片(2)に対して引張機構によって張力を加える前後で、制御部がスキャナを制御し、マルチプローブ(1)を用いて、凸部(22)が配列された方向に沿って試験片(2)の表面を所定距離走査し、検出部が、チップ(T)の位置変位による第1及び第2カンチレバー(11、12)の形状変化から試験片(2)の表面の高さ情報を取得する。
(もっと読む)
車両のロール警報装置及びロール警報方法

【課題】 簡単な処理によって車両の走行状態に応じた最適時にロール警報を発する。
【解決手段】 車速センサ22は車速を検出し、傾き量算出部20は車両の車幅方向の傾き量を算出する。継続上限時間記憶部24には傾き継続時間の上限値が車速に対応して予め記憶され、傾き量判定部21は、ロール警報設定値をロール警報設定値記憶部19から取得し、傾き量算出部20が算出した傾き量がロール警報設定値を超えたか否かを判定する。タイマ26は、傾き量がロール警報設定値を超えたと傾き量判定部21が継続して判定しているとき、その継続時間を計数する。継続時間判定部25は、車速センサ22が検出した車速に対応する傾き継続時間の上限値を継続上限時間記憶部24から取得し、タイマ26の計数値が上限値に達したか否かを判定する。警報器23は、タイマ26の計数値が上限値に達したと継続時間判定部25が判定したとき、運転者に対して警報を発する。
(もっと読む)
歯車の伝達誤差測定装置
【課題】測定精度を向上することができる歯車の伝達誤差測定装置を提供する。
【解決手段】駆動歯車1Aの駆動軸2Aに当接するローラ3Aaの回転に応じて駆動側パルス信号を生成する駆動側回転検出器3Aと、従動歯車1Bの従動軸2Bに当接するローラ3Baの回転に応じて従動側パルス信号を生成する従動側回転検出器3Bと、駆動側パルス信号及び従動側パルス信号の経時データを記憶する信号バッファ7A,7Bと、駆動歯車1A及び従動歯車1Bの例えば1回転にそれぞれ対応した駆動側基準パルス信号及び従動側基準パルス信号を生成する駆動側基準回転検出器5A及び従動側基準回転検出器5Bと、駆動側パルス信号及び従動側パルス信号における1パルス当たりの回転角を演算し、これに基づいて駆動歯車1A及び従動歯車1Bの回転角の経時変化を演算し、駆動歯車1Aと従動歯車1Bの伝達誤差の経時変化を演算する演算装置10とを備える。
(もっと読む)
方位角計測装置および移動体
【課題】簡素で安価な構成でなおかつ精度の高い方位角計測装置を備えた移動体を提供する。
【解決手段】駆動車輪の回転速度を計測する駆動輪回転速度計測手段と、前記回転角速度推定値ωA312を出力できるジャイロセンサと、前記駆動輪回転速度からオドメトリによって前記回転角速度推定値ωBを計算する運動学演算手段と、前記回転角速度推定値ωA312と前記回転角速度推定値ωB412とを逐次選択する回転角速度推定値選択手段と、前記回転角速度推定値選択手段403の出力を積分する積分器404と、からなる移動体の方位角計測装置を構成し、前記回転角速度推定値選択手段403が常に信頼性の高い回転角速度推定値を出力するようにした。
(もっと読む)
3次元形状測定装置及び方法
【課題】被測定物の3次元形状を高精度に測定することが可能となる3次元形状測定装置及び方法の提供。
【解決手段】一対のプローブ20a,20bを、その先端同士が所定の間隔を開けて一直線状に対向するように配置し、被測定物1を、被測定物1の表面側及び裏面側がそれぞれ一対のプローブに対向するように位置させた後に、一対のプローブ20a,20bのお互いの位置関係を変更することなく、該一対のプローブ間における被測定物1の相対的な位置をスライド移動させて、一方のプローブにより被測定物1表面の3次元形状を測定し、次いで、他方のプローブにより被測定物1裏面の3次元形状を測定する。
(もっと読む)
在宅確認システム
【課題】
家族などの帰宅または外出を容易に認識でき、地震や火事などが発生した際に、倒壊建物内に人が残っていたか否かを容易に確認できる在宅確認システムを提供する。
【解決手段】
建物の出入り口の内側近傍に設置する距離計測センサと、建物の出入り口の外側近傍に設置する人体感知センサと、両センサの計測データを伝送するデータ送信機と、該データ送信機とネットワークを経由して接続するデータ受信機と、該データ受信機と接続し且つ両センサの計測データを所定期間登録・保存するホストコンピュータまたはセンターサーバとを備える。
(もっと読む)
棒状体の曲がり測定装置
【課題】棒状体の真の曲がりを測定することができる棒状体の曲がり測定装置を提供する。
【解決手段】長手方向に搬送される棒状体aの搬送方向と直交する平面内において互いに交差する第1及び第2の方向の棒状体変位を検出する一組または複数組の変位検出手段3を有する曲がり測定装置において,少なくとも前記変位検出手段3に最も近い上流側と下流側とに棒状体aを下方から支持するV字状案内ロール1a,1bを設けると共に,該V字状案内ロール1a,1bの姿勢を棒状体aの水平方向成分の曲りに追従可能に構成したことを特徴とする棒状体の曲がり測定装置。
(もっと読む)
測定部支持機構およびそれを備えた薄板の表面形状測定装置
【課題】 組立て誤差、作動誤差の影響を最小限とする測定部の支持機構およびそれを備えた薄板の表面形状測定装置を提供することを課題とする。
【解決手段】 基台110の両端に立設された垂直移動手段310に対して、水平移動手段320との連結支持として、片側を固定支持し、他方側を水平移動手段320の長手方向あるいは、長手方向と長手方向と直角方向とにフリーとした支持としたことで、離れて平行に立設する垂直移動手段310に組立て上の誤差があっても、その影響を受けずに水平移動手段320を作動させることができ、組立て上の誤差等が測定結果に悪影響を与えることを抑制できる。
(もっと読む)
段ボールシートの斜行検出装置及び検出方法並びにスリッタスコアラ
【課題】 段ボールシートの斜行検出装置及び検出方法並びにスリッタスコアラに関し、スリッタスコアラ内部で発生する段ボールシートの斜行を検出できるようにする。
【解決手段】 スコアラ10よりもシート搬送方向上流側に設けられ、段ボールシート5のシート幅方向における位置を検出する第1の位置検出手段20と、スリッタ11よりもシート搬送方向下流側に設けられ、段ボールシート5のシート幅方向における位置を検出する第2の位置検出手段22と、第1の位置検出手段20及び第2の位置検出手段22により検出された段ボールシート5の位置情報に基づいて段ボールシート5の斜行量を算出する算出手段27aとをそなえて構成する。
(もっと読む)
連続鋳造機におけるロールのベアリング異常検出装置及び方法
【課題】 連続鋳造機におけるロールのベアリング異常を早期に且つ正確に検出する。
【解決手段】 鋳片を挟み込む一対のロール2,3が鋳片の鋳造方向に所定の間隔で並ぶ連続鋳造機において、各ロール2,3の両端部を回転可能に支持するベアリング4a,4a,5a,5bの異常を検出する装置及び方法であって、一対のロール2,3間における少なくとも2箇所の対向間隔L1,L2を測定し、測定した少なくとも2箇所の測定値の差(L1−L2)を計算すると共に、各測定位置の当該測定前に測定した測定値との差(ΔL1,ΔL2)を計算し、それぞれ計算した値が予め設定されたしきい値を超えたときに、そのしきい値を超えたロールのベアリング異常と判定する。
(もっと読む)
回転角度検出装置
【課題】製造コストを低減することができる回転角度検出装置を提供する。
【解決手段】ステアリングシャフト12と一体的に回転する主動歯車14には同一の軸を中心として回転する歯数の異なる第1及び第2の主動歯車部61,62を設けるようにした。一方、第1及び第2の従動歯車15,16の歯数をそれぞれ同じとし、それら第1及び第2の従動歯車15,16を第1及び第2の主動歯車部61,62にそれぞれ噛合させるようにした。このため例えば歯数の異なる二種類の従動歯車をそれぞれ同一の主動歯車に噛合させることで減速比を異ならせるようにした場合と異なり、単一種類の主動歯車14と単一種類の第1及び第2の従動歯車15,16を用意すればよいので、回転角度検出装置11の製造コストを低減することができる。また、第1及び第2の従動歯車15,16の主動歯車14に対する組み付け間違いもない。
(もっと読む)
紙幣類厚み検出装置
【課題】 精度が高く、簡素で安価な検出ローラ、及びその検知ローラを備えた紙葉類厚み検出装置の提供すること。
【解決手段】 基準ローラと、基準ローラに対向する検出ローラと、検出ローラの変位を検出する変位センサとを有し、検出ローラと変位センサとの接触、衝突を規制、制限する制限機構(留め輪13)を設ける紙葉類厚み検出装置。
(もっと読む)
近接場光顕微鏡、近接場光による試料測定方法
【課題】 プローブの試料への衝突による破損を防ぎ、確実かつ短時間でプローブを試料に対して接近させることが可能な近接場光顕微鏡を提供する。
【解決手段】 近接場光プローブ2先端から試料までの距離を検出する距離検出手段31と、近接場光プローブ2の基準面位置情報に基づいて近接場光プローブ2と試料20を近接場光領域もしくはその近傍まで接近させる距離制御手段15とを備えた近接場光顕微鏡。
(もっと読む)
電線の弛度測定方法および装置
【課題】大がかりな設備を要することなく容易に電線の弛度を測定できる電線の弛度測定方法および装置を提供すること。
【解決手段】第1、2の支持点i,jの第1および第2のカテナリー角α,βを測定する第1、第2の角度検出手段11,12と、各データを入力する入力手段13と、カテナリー曲線を表す式を積分して求めた計算式に、α,βの測定値および電線の長さLの推定値等の各データを代入し演算して長さLの計算値を求める第1の演算手段14と、計算値と推定値を比較して、両値が予め設定された精度で一致する否かを判定する判定手段14と、一致すれば、推定値を長さLの測定値と決定する決定手段14と、α,β、長さLの測定値に基づいて電線の弛度を演算する第2の演算手段14とを備え、判定手段14で一致しなければ一致するまで、計算値を推定値として計算式に代入して再度第1の演算手段14による演算と判定手段14による判定を繰り返す。
(もっと読む)
回転角度検出装置
【課題】主に自動車のステアリングの回転角度検出等に用いられる回転角度検出装置に関し、簡易な構成で、正確な回転角度の検出が可能なものを提供することを目的とする。
【解決手段】第一及び第二の検出体2、4と補助検出体21の各回転速度を異なるものとし、第一及び第二の検出手段8、10、第二の検出手段10と補助検出手段25、第一の検出手段8と補助検出手段25からの各検出信号により、制御手段26が回転体1の仮の角度を各々演算し、これらの演算値θ1、θ2、θ3が所定範囲内であった時に、演算値θ1を回転体1の回転角度θとして検出することによって、各検出体や検出手段の異常の検出が可能となり、簡易な構成で、正確な回転角度の検出が可能な回転角度検出装置を得ることができる。
(もっと読む)
測定装置、測定システム、対象までの距離を測定するための方法
【課題】エアゲージが常に有利な離隔距離で作動し、そのパフォーマンス及び有益な測定範囲を最大にするように、測定を行える方法及びシステムを提供すること。
【解決手段】対象の表面までの距離を検知するように構成されたエアゲージと、エアゲージの相対位置、及び対象の表面の相対位置を含むグループのうち少なくとも1つを測定するように構成されたセンサとを有しており、エアゲージ及びセンサの各出力側は、結合されたエアゲージリーディングを形成するように結合されている。
(もっと読む)
プローブ用の測定ヘッド
【課題】 割り出し精度を損なうことなしに方向付け可動要素が効率的にガイドされ、触針の軌跡が完全に制御される測定ヘッドを提供する。
【解決手段】支持要素(30)と、固定位置と固定解除位置との間で第一軸(B)の方向に摺動可能な、第一可動要素(40)と、支持要素(30)と接続された第一ガイド部材(84)と、第一可動要素(40)と接続された第二ガイド部材(82)とを備え、第一可動要素(40)が固定位置にあるときに、第一ガイド部材(84)と第二ガイド部材(82)とが接触せず、第一可動要素(40)が固定解除位置にあるときに、第一可動要素(40)が支持要素(30)に対して第一軸(B)を中心に回転できるように、第一ガイド部材(84)が第二ガイド部材(82)と組み合う。
(もっと読む)
第一の物体の第二の物体に対する空間的な位置の測定装置及び方法
【課題】第一の物体の第二の物体に対する空間的な位置を測定するための方法。
【解決手段】測定方向(A1)に沿った絶対位置測定装置(25)の絶対測定値と測定方法(R1,R2)に沿ったインクリメンタル位置測定装置(30a,30b)のインクリメンタル測定値の両方又は一方に対して、座標変換(T)を実施して、その結果この変換の実施後に、絶対測定値とインクリメンタル測定値を、それぞれ同じ測定方向(R1,R2)に関連付けるとともに、この変換後に得られる絶対測定値とインクリメンタル測定値とから、第一の物体(M1)の第二の物体(M2)に対する空間的な位置を求めるものと規定する。
(もっと読む)
構造物の変位測定装置
【課題】 近接工事による構造物の変位を測定する装置において、基準線の揺れによる影響を無視できるようにした安価な構造物の変位測定装置を提供する。
【解決手段】 構造物7が工事の影響を受ける範囲を挟んだ外側に設定された固定点の間に張架する線材2と、工事の影響を受ける範囲内の変位測定点に対応する線材に取り付けた測定対象体3と、測定対象体3と構造物7の位置の変化を測定する構造物7に固定した変位計測センサ4a、4bと、前記測定対象体3の揺れを減衰させる減衰装置5とを備えた。
(もっと読む)
2つの読み取りカーソルを備える角度センサーならびにこのセンサーを有する車両
【課題】小型で適用範囲の広い車両用角度センサを提供する。
【解決手段】パネル24上で回転させるために搭載してあるレバーを有し、このレバーは、回転軸A1の周りで周辺に広がる読み取りトラックと協働する少なくとも1つの読み取りカーソル34,36を備える。前記カーソル34,36は、参照角度位置Prに対して、前記レバー22の瞬間角度位置Piを、トラック30,32上で読むことができる。出力信号を生じるように、前記2つのカーソル34,36をレバー22を設け、かつ2つの連動する出力信号を生じさせるとともに、カーソル34,36の2つの独特な角度位置Piは、それらに連動する読み取りトラック30,32に対する、レバー22の角度位置Piに対応している。
(もっと読む)
121 - 140 / 150
[ Back to top ]