
Fターム[2F069GG63]の内容
測定手段を特定しない測長装置 (16,435) | 測定方式 (4,762) | 測定子の数 (697) | 2つ (150)
Fターム[2F069GG63]に分類される特許
81 - 100 / 150
連結具の変位量表示装置
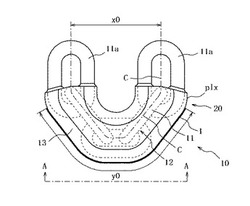
【課題】連結部同士が相対離隔変位が最大許容変位量を超えたか否かを、確実に表示することができる連結具の連結具変位量検出装置を提供する。
【解決手段】連結具変位量検出装置10を、ゴム体13の表面に貼り付けられ、もしくは、一部を埋設して取り付けられた低伸長性紐状体1で構成し、この低伸長性紐状体1を、連結具20の初期状態においてチェーン12の長さ方向に沿ってU字状に延在させるとともに、連結部11A相互間の離隔距離が初期状態に対して前記最大許容変位量以下の予め定められた量だけ相対離隔変位したとき破断するよう配置する。
(もっと読む)
ウエハー反り測定の配置構造及び反り測定方法

ウエハーの反りを定量化するための配置構造に関する。プラズマ処理システム内に位置する配置構造が提供される。配置構造はウエハーを保持するための支持機構を含む。配置構造は、ウエハー上の複数のデータポイントの第1測定データセットを収集するように構成された第1センサセットをも含む。第1測定データセットは、第1センサセット及びウエハーの間の最小ギャップを表す。第1センサセットは、プラズマ処理システムの処理モジュールの外部にある第1位置に位置している。 (もっと読む)
ピストンシリンダアッセンブリのためのセンサ保持装置
【課題】摩擦力を最小にして2つの位置測定装置の回転指向性が得られるようなセンサ保持装置を提供する。
【解決手段】本発明は、シリンダ(3)と該シリンダに対し可動なピストン棒(5)とを備えたピストンシリンダアッセンブリ(1)のためのセンサ保持装置に関わる。センサ保持装置は、ピストン棒(5)と同期して運動を行ない且つ第1の位置測定装置(11)を担持している保持要素(7)を有している。第2の位置測定装置(13)は保持部(15)を介してシリンダ(3)に対し軸線方向において位置固定して保持され、第1の位置測定装置(11)と第2の位置測定装置(13)との間に回転指向性の取り付け位置がある。この種のセンサ保持装置において、本発明によれば、シリンダ側の保持部(15)と保持要素(7)とが互いに相対回転可能であり、保持部(15)と保持要素(7)との間に作用する磁力が両位置測定装置(11,13)を互いに回転させて方向調整させる。
(もっと読む)
センサ駆動装置
【課題】複数のセンサによる測定点を一致させることができるセンサ駆動装置を提供する。
【解決手段】駆動手段11は取得した現在の測定対象物9の流れ速度に基づいてアクチュエータ3を駆動し、支持部材32、すなわちセンサ2Aを所定の速度で測定対象物9の幅方向に往復移動させる。これによりセンサ2Aの位置が測定対象物9に対して常に適切な位置に位置づけられるように制御される。位置調整手段12は、制御装置51から取得した現在の測定対象物9の流れ速度および、駆動手段11から取得した現在のセンサ2Aの速度(測定対象物9の幅方向における速度)に基づいて、アクチュエータ4を駆動し、センサ2Bの位置を調整する。これにより、センサ2Bの測定点がセンサ2Aでの測定点に一致するように、センサ2Aおよびセンサ2Bの位置関係を調整する。
(もっと読む)
多点プローブの零点誤差関連値記録装置
【課題】多点プローブにおいて、複数のセンサのドリフトが生じた後の零点誤差の補償を容易に行うことができる多点プローブの零点誤差関連値記録装置を提供する。
【解決手段】
零点誤差関連値記録装置は試料を回転させるスピンドルと、複数の変位センサA,B,Cを含む真直形状測定用のセンサユニット220を試料の測定面に相対するように支持するセンサキャリッジ230を備える。試料が所定回転角度回転する毎に変位センサA,B,Cから、試料の測定面における同心円に沿う形状値f(rF,θ),f(r0,θ),f(rR,θ)及び零点誤差を含む測定値をCPU310が読取り、読取りした形状値及び零点誤差を含む測定値を記憶装置340に記憶する。
(もっと読む)
多点プローブの零点誤差の変動検出方法
【課題】複数のセンサのドリフトが生じた後の零点誤差の補償を容易に行うことができる多点プローブの零点誤差の変動検出方法を提供する。
【解決手段】
多点プローブの零点誤差の変動検出方法は、センサユニット220をスピンドルにて回転されている状態の試料の測定面に相対するように配置して、試料が1回転する間において、試料が所定回転角度回転する毎に複数の変位センサA,B,Cから出力される試料の測定面における同心円に沿う形状値及び零点誤差を含む測定値をCPU310に読取りさせて記憶装置340に記憶させる。記憶装置340が記憶した、同一の試料に関する新しい測定値と古い測定値とに基づいて、零点誤差の変動量を算出する。
(もっと読む)
被測定面の測定方法
【課題】ピッチング誤差やローリング誤差を抽出でき高精度な測定を行える被測定面の測定方法を提供する。
【解決手段】被測定面を回転させる場合における回転軸線の振れに相当するティルトモーション誤差は、被測定面を高精度に測定する上で除去すべきでものである。従来技術によれば、かかるティルトモーション誤差を簡易に除去する方法がなかった、これに対し本発明によれば、前記被測定面を備えた部材を回転させながら、前記第1の2次元角度センサにより前記第1の測定点の面法線角度を2次元で測定し、前記第2の2次元角度センサにより前記第2の測定点の面法線角度を2次元で測定し、前記第1の2次元角度センサの測定値に基づいて、前記第2の2次元角度センサの測定値からティルトモーション誤差を排除することができる。
(もっと読む)
座標測定機における動的変形による測定誤差の補正
【解決手段】測定機(1)は、測定容積内において測定センサ(3)を移動させるために座標軸線に沿って移動可能な複数の部材(8、10、12)を設けた可動ユニット(7)を備え、レーザセンサ(26)は、可動部材(8)に結び付いて、可動ユニット(7)の動的変形に関連した値を供給し、これらの値は、動的変形により生じた測定機(1)の測定誤差を補正するために処理される。 (もっと読む)
連接構造の動作をキャプチャするための処理方法
【課題】本発明は、センサを備えた連接構造の動作を特徴付けるシミュレートパラメータを得る方法に関する。
【解決手段】本発明の方法は、センサが与える測定値に各々相当する推定測定データを構造の推定動作状態パラメータから計算する段階と、センサが与える測定値とその測定値に相当する推定測定データとの間の差分を求める段階と、推定動作状態パラメータに関する少なくとも一つの推定差を得るために、前記差分から発生するデータをオブザーバタイプの包括的な数学的処理する段階と、シミュレートパラメータを形成するために、推定動作状態パラメータに関する推定差と、それに相当する推定動作状態パラメータとを加算する段階とからなる。
(もっと読む)
膜厚測定装置、膜厚測定方法および記録媒体
【課題】渦電流損失測定センサ、膜厚測定装置、膜厚測定方法およびコンピュータ読取り可能な記録媒体を提供する。
【解決手段】高周波磁界を励磁して導電性膜9に渦電流を励起させるコイルと、渦電流に起因する渦電流損失の影響を受けた高周波電流を出力するコイルとを有する渦電流損失測定センサ20と、コイルが出力する高周波電流から渦電流損失測定センサ20のインピーダンスの変化、高周波電流の電流値の変化または高周波電流の位相の変化を測定して渦電流損失量を測定するインピーダンスアナライザ48と、導電性膜9と渦電流損失測定センサとの距離を測定する光学式変位センサ32と、インピーダンスアナライザ48と光学式変位センサ32の各測定結果に基づいて導電性膜9の膜厚を算出する膜厚演算部54を含む制御コンピュータ42と、を備える膜厚測定装置1。
(もっと読む)
検出装置
【課題】検出手段の損傷を確実に防止することができる検出装置を提供する。
【解決手段】搬送手段3により搬送される物体Sに接近又は離間する方向に移動して該物体Sの性状を検出可能であると共に、計測手段6が計測した移動方向に沿った物体Sの長さに応じて物体Sに接近可能な検出手段21と、搬送手段3による物体Sの搬送方向に対して検出手段21より上流側で検出手段21と共に物体Sに接近可能であり、前記移動方向における物体Sの規制位置にてこの物体Sに接触して物体Sを検知可能な検知手段7と、検知手段7が物体Sを検知した際に物体Sと検出手段21との接触を回避する回避手段5とを備えることを特徴とする。
(もっと読む)
薄板の表面形状測定装置
【課題】垂直に保持した薄板の表面形状の測定において、装置構成を簡素化かつ低コストとすると共に、操作を容易にする。
【解決手段】被測定物である薄板gの表面形状測定装置において、基台10上に薄板を垂直に保持する垂直保持機構20と、薄板gを挟んで平行に配置された一対の固定レール41と、該一対の固定レール間に架設され薄板gを挟み薄板表面に対して一定の間隔をもって平行に配置された一対のスライド軸51、及び該スライド軸を該固定レールに沿って移動させる駆動装置45と、変位センサ32a〜bが装着され該スライド軸に沿って夫々移動可能に配置された一対の測定台31、及び該測定台の駆動装置と、該スライド軸の両端部に架設され該スライド軸を連結し該スライド軸間の間隔を位置決めする連結部材52とからなり、該スライド軸と該連結部材とによって略矩形形状とし、薄板gの両面の形状を同時に測定可能に構成した。
(もっと読む)
ステレオビジョンプローブシステムの包括的校正方法
【課題】フレーム歪み誤差と並んでプローブ形状誤差をも校正できるステレオビジョンプローブシステムの包括的校正方法を提供する。
【解決手段】ステレオビジョンプローブシステム120は、タッチプローブ140に形成されたマーカパターン150を複数のカメラ130A,130Bで撮影し、三角法演算を行ってタッチプローブ座標位置を測定する。包括的校正システム100において、フレーム歪み校正は、可搬式の校正治具160にタッチプローブ140を設置して三角法演算を行う反復工程を含むが、タッチプローブ140のプローブ形状歪み誤差に影響されない。プローブ形状歪み校正にはフレーム歪み校正の結果が適用される。同一のプローブチップが包括的校正ルーチンの全体を通じて用いられる場合、プローブチップ校正はフレーム歪み校正により用いられる画像セットからの画像を用いる。
(もっと読む)
列車位置検知システム
【課題】この発明の課題は、列車の位置を正確に検知する列車位置検出システムを提供することである。
【解決手段】外部から受ける外圧を測定する測定手段と、所定区間において外圧を受ける位置を位置情報として予め記録する記憶手段と、前記測定手段で測定した外圧に基づいて、前記記憶手段に記録されている前記位置情報のいずれの位置で前記測定手段が外圧を測定したかを判断する判断手段とを有する。
(もっと読む)
長尺体の表面形状測定方法および表面形状測定装置
【課題】オートコリメータでは高精度測定ができない長さが1m以上の長尺状物の表面形状(真直度)を複数の変位センサを用いて測定する。
【解決手段】3本の変位センサA,B,Cをピッチ間隔p毎に直列にアーム311に固定し、テーブル上に固定された被測定物の真直度を、オートコリメータが高精度に測定できる作動範囲ではオートコリメータにより測定される値を用いて2本の変位センサA,Bにより2点法で検出された真直度値のピッチングの補正を行って初期真直度値データ列を得、オートコリメータが高精度に測定できない作動範囲における真直度の測定においては第三の変位センサCより検出される真直度値で測定基準を作り、この測定基準の測定点の値を基準にして変位センサA,Bによる2点法の出力からピッチングを検出し、それを使用してピッチング補正しながら次々に繰り返して測定範囲を広げて延長真直度値データ列を得、真直度曲線を出力する。
(もっと読む)
無段変速機用巻掛け部材の周長測定装置および予張装置
【課題】 無段変速機で使用されるチェーンやベルトなどの巻掛け部材の周長を簡単にかつ精度良く決定することを可能にする無段変速機用巻掛け部材の周長測定装置およびこれを備えた予張装置を提供する。
【解決手段】 無段変速機用巻掛け部材の周長測定装置は、巻掛け部材の直線部に対向して所定距離Lをおいて配置され1対のセンサと、巻掛け部材の所定箇所にセンサに対応するように設けられた被検知部と、1対のセンサの出力から被検知部がL移動するのに必要な時間Taを求める第1演算手段と、1対のセンサの出力から被検知部が1周するのに必要な時間Tbを求める第2演算手段とを備えており、L×Tb/Taによってチェーン周長が求められる。
(もっと読む)
センサのミスアラインメント検知および測定システム
ミスアラインメント検知センサアセンブリを提供し、これは、第1の軸に沿う検知方向を有する前方監視センサと、第1の軸と所定の関係にある第2の軸に沿う加速度を検知する慣性センサとを備えている。ミスアラインメント検知システムは、ミスアラインメント検知センサアセンブリと、信号処理システムとを用いて、第1の軸とセンサアセンブリの前方動作方向との間のミスアラインメント角度を計算する。前方監視センサアセンブリの角度ミスアラインメントを検知する方法についても開示し、本方法では、前方監視センサアセンブリの検知の軸と所定の関係を有する軸に沿う加速度を測定し、測定した加速度を所定の閾値と比較する。 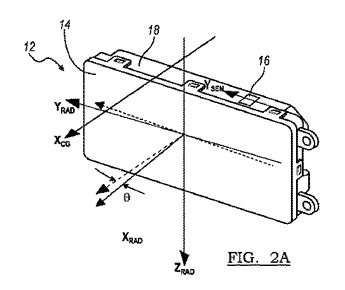 (もっと読む)
(もっと読む)
測定システムおよび測定方法
【課題】コストを低減できる測定システムを提供すること。
【解決手段】測定システムは、搬送コンベア2上を搬送されるエンジンブロック10のボアA0〜A3の寸法を測定する。測定システムは、搬送コンベア2上に設けられたCCDカメラと、寸法を測定するエアマイクロメータと、CCDカメラおよびエアマイクロメータを搬送コンベアに対して相対移動させる移動機構と、これらを制御する制御装置と、を備える。制御装置は、搬送コンベア2上を搬送されるエンジンブロック10のボアA0および側面AをCCDカメラで撮影し、この撮影画像に基づいてエンジンブロック10の残るボアA1〜A3の位置を特定して、これらボアA0〜A3にマイクロメータを接近させて寸法を測定する。
(もっと読む)
座標測定機のための改良された継ぎ手軸
本発明の1つの態様は、第1の端と、第2の端と、それらの間の複数の継ぎ合わせアームセグメントと、を有する関節付きアームを含む座標測定機器を含み、各アームセグメントは、少なくとも1つの位置トランスデューサを含む。アームの第2の端には、測定プローブアセンブリが結合される。測定プローブアセンブリは、アームの第2の端と測定プローブアセンブリのボディとの間に第1の回転軸を提供する第1の継ぎ手を含む。エンコーダは、エンコーダケースおよびエンコーダシャフトを含む。エンコーダケースは、ボディに剛結合されるエンコーダシャフトに対して第2の軸を中心に回転するように構成される。エンコーダシャフトにプローブが剛結合される。第2の軸を中心にプローブに対して回転するように、測定機器がエンコーダケースに結合される。 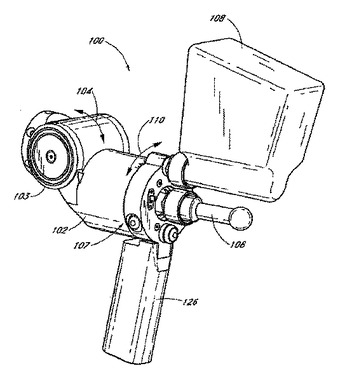 (もっと読む)
(もっと読む)
ステアリング角の絶対値を測定するための光学式ステアリング角センサ
本発明は、ステアリングホイールが複数回転する場合でもステアリング角の絶対値を定める光学式ステアリング角センサに関するものであり、ステーター、バーコードを有するローター、及び評価電子機器を備える。本発明では、ローター(1,13)は、回転数検出のためにウォーム状のトラック溝部(5)を備え、このトラック溝部(5)に対応してステーター(2)に駆動体突起(6)を備え、この駆動体突起(6)は、トラック溝部(5)に係合し、回転可能となるようにベアリング(9,15)に配置され、駆動体突起(6)とともに回転可能な磁石(8)の保持のためのホルダ(7)を備え、この駆動体突起(6)に対応して評価回路に設けられた固定状のホールセンサ(11)を有する。 (もっと読む)
81 - 100 / 150
[ Back to top ]