
Fターム[2F069GG63]の内容
測定手段を特定しない測長装置 (16,435) | 測定方式 (4,762) | 測定子の数 (697) | 2つ (150)
Fターム[2F069GG63]に分類される特許
61 - 80 / 150
測定装置

【課題】測定対象物の測定位置を測定センサに対して正確かつ簡単に位置決めすることができる測定装置を提供する。
【解決手段】測定装置1は、焼結部品2の寸法を測定する測定センサ3,3と、測定センサ3,3が取り付けられた固定部10と、焼結部品2を保持する治具20とを有する。固定部10には、治具20を測定ポイントへ案内するためのガイド溝13を二次元平面上に形成すると共に、焼結部品2の測定位置A〜P,A〜Pを測定ポイントに一致させるように治具20を固定部10に対して位置合わせする位置決め溝14を、ガイド溝13の溝幅及び溝深さより大きくガイド溝13上に形成する。そして、ガイド溝13の溝幅より大きく、位置決め溝14より小さいボール26を、固定部10側へ付勢する圧縮ばね25を、治具20に設ける。
(もっと読む)
加工装置、および、加工具と被加工物の距離補正方法

【課題】回転刃の刃先と被加工物の高さ方向の距離を正確に補正する。
【解決手段】ルータビット43と、多軸ロボット3と、接触式変位計7と、レーザ変位計8と、高さ補正部とを有する。多軸ロボット3は、ルータビット43を軸回転させ、被加工物100に対して移動させる。接触式変位計7は、多軸ロボット3がルータビット43の刃先を変位計測面7Aに上から押し当てたときに生じる変位を計測する。レーザ変位計8、変位計測面7Aと被加工物100の相対的な高さを計測する。高さ補正部は、接触式変位計7とレーザ変位計8の計測結果に基づいて、ルータビット43の刃先と被加工物100との高さを補正する。
(もっと読む)
路面平坦性測定装置
【課題】 IRI算出において予め定められた測定区間長内で試験車の走行速度が変化してもそれに対応することを容易にすると共に、時々刻々の速度変化毎に速度補正ができるようにして、より精度の良い測定を可能にすること。
【解決手段】 本発明の路面平坦性測定装置は、試験車の車軸側(またはサスペンション下側)に位置する加速度計1と、サスペンションが支持する車体側(またはサスペンション上側)に位置する加速度計2と、試験車の走行速度を測定するためのGPSレシーバ3と、測定データを収集して一時記録する収録装置4と、測定データからIRI(国際ラフネス指数)を算出するパーソナルコンピュータ(以下、「PC」と略称する)5と、を備える。PC5は、各機器の制御とIRIの算出とを各々別タスクで制御し、タスク間の測定データの受け渡しはファイル及び共通(グローバル)変数で行う。
(もっと読む)
長尺円筒部材の真直度計測治具とその計測方法
【課題】長さが2mを超える長尺円筒部材に計測用の罫書を施すことなく、長尺円筒部材の真直度を高精度に計測することができる長尺円筒部材の真直度計測治具とその計測方法を提供する。
【解決手段】真直度計測治具10は、治具本体12と水準器18からなる。治具本体12の下面12aは求心構造13を有し、求心構造により治具本体を長尺円筒部材1の外径上部又は内径下部に水平を保持して載せると、長尺円筒部材の中心軸Z−Zから同一高さ及び同一向きの「求心位置」を維持する。さらに、治具本体12は、オートレベル又はトランシットでピッチングを計測可能な上下方向の高さ変位計測目盛20Aと、トランシットでヨーイングを計測可能な幅方向の幅変位計測目盛20Bとを備える。
(もっと読む)
駐車支援装置
【課題】車輪速センサのパルスから算出した車輪の移動距離の誤差を補正し、自車両の位置を精度良く検出することができる駐車支援装置を提供する。
【解決手段】車輪速センサ2から計測されたパルス数に変換係数を乗ずることで車輪の移動距離を算出する車輪移動距離算出手段1と、車輪移動距離から自車両の位置を演算する自車位置演算手段4と、自車両の位置に基づき各距離センサ1によって得られた距離データの分布を各距離センサ1に対し生成する距離データ分布生成手段5と、各距離センサ1の距離データ分布を照合し、車輪の移動距離の誤差を算出する車輪移動距離誤差算出手段6と、車輪の移動距離の誤差に基づき車輪移動距離算出手段3にて用いられる変換係数を補正する変換係数補正手段7を備えている。
(もっと読む)
水中移動体の位置検知装置
【課題】水中移動体の位置の検知精度を向上させることができる水中検査装置の位置検知装置を提供する。
【解決手段】水中検査装置9は、上下位置を検出するための圧力センサ18と、姿勢角を検出するための慣性センサ部19とを備えている。また、水中検査装置9は、ほぼ同一平面上の多数の方向における周囲の構造物Aとの相対距離を検出するレンジセンサユニット23を備えている。制御装置11は、圧力センサ18及び慣性センサ部19で検出された水中検査装置9の上下位置及び姿勢角等に基づいてレンジセンサユニット23の検出方向面の位置を演算し、その検出方向面位置における構造物の断面形状及びその位置を演算する。そして、制御装置11は、構造物の断面形状に対する水中検査装置9の相対位置をレンジセンサユニット23の検出結果に基づいて演算し、さらに構造物の断面形状の位置情報に基づいて水中検査装置9の水平位置を演算する。
(もっと読む)
真直度測定装置
【課題】真直度を効率よく測定することができる真直度測定装置を提供すること。
【解決手段】本発明の真直度測定装置10は、被測定物M上を自走可能であり反射ミラーを載置した筐体11と、筐体11とは別に設置されたオートコリメータ12と、筐体11の走行距離データ、及びオートコリメータ12からの傾斜データを処理し被測定物Mの真直度を算出する解析用コンピュータ13とを備えている。筐体11は、その底面側にタイヤ8a、8bを有し、タイヤ8bの回転によって筐体11の走行距離が求められ、その走行距離は解析用コンピュータ13に入力されて被測定物M上における筐体11の位置が算出される。
(もっと読む)
膜厚計測装置及び方法
【課題】精度良く、シリンダライナとピストンとの間における油膜の膜厚を計測することのできる膜厚計測装置を提供する。
【解決手段】ピストンにおけるピストンリング摺動面とシリンダライナの壁面との間の膜厚については静電容量方式により計測された膜厚データを選択し、ピストンにおけるピストンリング摺動面とシリンダライナの壁面との間以外のピストンの壁面とシリンダライナの壁面との間の膜厚についてはレーザ誘起蛍光法により計測された膜厚データを選択する。そして、選択した膜厚データを記録する。
(もっと読む)
測定装置
【課題】長尺の断面直線形状や面形状の測定における水準器と多点法の利点だけを有効に使い、大面積の被測定面を迅速に高精度に測定できる測定装置を提供する。
【解決手段】被測定試料の置かれたステージと多点法プローブを保持するセンサホルダが互いに相対的に移動をして直線形状を走査測定する装置において、移動する側のセンサホルダまたはステージの走査方向の傾斜角を測定することの出来る水準器を備えていて、前記水準器によって走査移動の開始点と終了点での前記移動側物体の傾斜を測定することで、多点法プローブのゼロ点調整誤差をその場校正する。
(もっと読む)
台車の車輪軸受部の異常判定方法
【課題】簡便でしかも車輪軸受部の異常を高い精度で検出し判定するための台車の車輪軸受部の異常判定方法を提案する。
【解決手段】
軌道上を走行する連結式台車の車輪軸受部の異常を判定するに当たり、該台車の車輪外側面の上輪部および下輪部に面して配設された一対の距離センサと、車輪の車軸レベルの高さに配置された車輪検知センサと、車輪を特定するための車輪認識スイッチとを使って、車輪検知センサによる車輪認識と同時に距離センサによる車輪位置測定とを内輪、外輪についてそれぞれ行うことにより、距離センサによる車輪位置測定値に基づいて、個々の車輪の傾きおよび車軸方向の平均位置ずれ量を求めて、車輪軸受部に異常を検知した場合に警報を出す方法。
(もっと読む)
樹脂押出用口金装置及び樹脂シートの製造方法
【課題】吐出口から吐出される樹脂材料のシート厚を正確に制御すること。
【解決手段】互いにリップ面11を対向させた状態で接続した一対のリップ10と、リップ面11の相互間距離を調整する調整手段20とを具備し、リップ面11の相互間に構成されるスリット状の吐出口12から樹脂材料を吐出する樹脂押出用口金装置において、吐出口12の外部においてリップ面11に平行となる態様でリップ10に設けた測定面13と、測定面13に対向する態様でリップ10に保持され、予め設定した計測基準から測定面13までの距離を計測する変位センサ30とを備えている。
(もっと読む)
ワークモデル生成方法、及びそのプログラム
【課題】演算時間の浪費を抑制し、且つ演算エラーを抑制したワークモデル生成方法、及びそのプログラムを提供する。
【解決手段】ワークモデル生成方法は、削り刃によって切削する経路を示す切削経路の外郭部である外郭切削経路を特定する外郭切削経路特定ステップと、外郭切削経路にて囲まれる面を含んで構成される所定厚みの切削ワークモデルを原ワークモデルから削除して加工ワークモデルを生成する加工ワークモデル生成ステップとを備える。このように、外郭切削経路にて囲まれる切削ワークモデルを原ワークモデルから削除して加工ワークモデルを生成するので、切削経路全体について切削ワークモデルを生成する必要がなく、演算時間の遅延を抑制することができる。
(もっと読む)
接触トリガー測定プローブ
工作機械などの座標位置決め装置のための測定プローブ(2)が、記述される。プローブハウジング(4)に撓み可能に設置される触針ホルダー(10)を含む。プローブハウジングに対する触針ホルダーの撓みを感知するために、1つ以上のセンサー(20)が設けられる。1つ以上のセンサー(46)により感知された撓みが撓みしきい値などのトリガー条件を満たしている時には、プロセッサ(22;40)は、トリガー信号(T)を生成する。プローブは、測定プローブの加速度を測定するための加速度計(28)も含む。プロセッサにより適用されるトリガー条件は、加速度計(28)により測定された加速度に応じて使用中に変更可能である。この方法において、誤トリガーは抑制される。 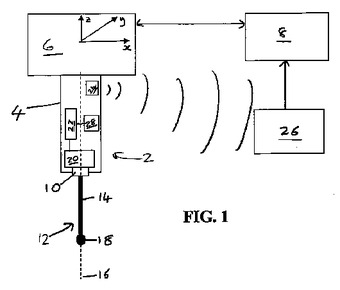 (もっと読む)
(もっと読む)
位置決定用測定装置のXYテーブル
XYテーブルは、固定基準部分(B)と、該基準部分(B)に対して相対的に第1の方向(Y)に移動可能に保持されている中間部分(F)と、該中間部分(F)に対して相対的に第2の方向(X)に移動可能に保持されている物体(O)とを含む。この場合、処理されるべき部品(W)が物体(O)又は基準部分(B)上に配置される。さらに、第1の方向(Y)に対して、基準部分(B)と中間部分(F)との間の平面内自由度(X、Y、Rz)を測定するための少なくとも1つの1Dプラスエンコーダ(M1、M2)と、第2の方向(X)に対して、物体(O)と中間部分(F)との間の平面内自由度(X、Y、Rz)を測定するための少なくとも1つの1Dプラスエンコーダ(M3、M4)とを含む。これにより、部品(W)又は物体(O)におけるツール中心点(TCP)の位置(Xo、Yo)が測定可能である。1Dプラスエンコーダ(M1、M2、M3、M4)は、第1及び第2(Y、X)の方向に広がる平面であってツール中心点(TCP)を含む平面内へのそれらの投影が、XYテーブルの全走行領域内で部品(W)の外側に存在するように配置されている。これにより、アッベ(Abbe)条件が満足されるので、簡単な1Dプラスエンコーダを用いて物体(O)におけるツール中心点(TCP)の正確な測定を可能にする。 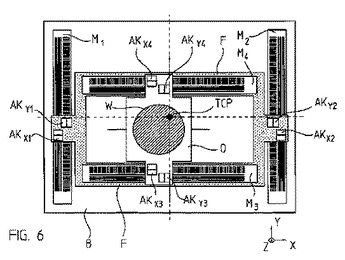 (もっと読む)
(もっと読む)
電動式座標測定装置
座標測定装置(10)はハウジング(12)を有し、ハウジングは台(11)上に回転可能に支持され、水平方向並進アーム(15)と係合するキャリッジ(14)を乗せる垂直ピラー(13)が取付けられている。アームの各端のタレット(18、19)が、プローブ(22、23)に接続された回転体(20、21)を収容する。台の回転、キャリッジの垂直運動、アームの水平運動、及びプローブの回転が、ハウジング内のモータ(27、28、29、30)によって駆動される。モータの回転は、ケーブル及びプーリ組立体によってアームとキャリッジに伝達される。アームの横方向動作を制御するケーブル(43)は、キャリッジがピラーに沿って上下に移動する際にケーブルの一定長さ及び張力を維持するために、両端がアーム両端に位置する先端(16、17)に取り付けられ、キャリッジ上側及び下側に位置するピラーの部分に沿って上方及び下方に延在する。プローブを測定表面に対し一定角度で維持するようプローブの回転と基部の回転が協調される。 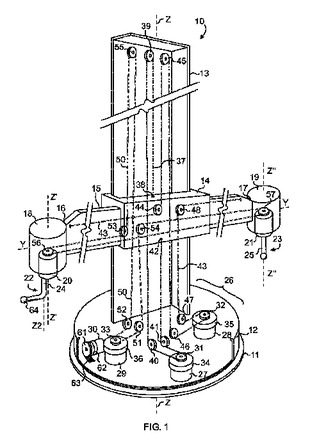 (もっと読む)
(もっと読む)
金属帯板の形状測定装置
【課題】単純な構造で精度が良く、その上安価な金属帯板の形状測定ロール及び金属帯板の形状測定装置を提供する。
【解決手段】金属の帯板が走行する設備に両端が回転自在に支持され前記帯板を巻き付けるように配置されるロールにおいて、該ロールの表面には少なくとも1本以上の周方向から傾斜した溝、又は、少なくとも2本以上の円周方向の溝を設けるとともに、前記ロールの軸方向位置には少なくとも1個以上の前記帯板の変位を測定する変位測定手段を備えた。
(もっと読む)
床面検出システム、移動ロボット及び床面検出方法
【課題】正確に床検出を行うことが可能な床面検出システム、移動ロボットや床面検出方法を提供すること。
【解決手段】本発明にかかる床面検出システムは、移動ロボット1に設けられている。まず、姿勢角センサ13の検出した姿勢角データに基づいて複数のセンサ角度候補を設定する。次に、複数のセンサ角度候補のそれぞれについて距離画像センサ12の検出した距離画像データに基づいて床検出を行う。そして、複数のセンサ角度候補のうち、最も多く床検出された候補を、当該床面に対する距離画像センサの角度として選択する。
(もっと読む)
作業車両
【課題】従来、この種のホイールバランスの検査を行う装置は、車両とは別に独立した装置から構成され、検査をする車輪は、車両に装着する前か、又は車両から取り外して検査しなければならない課題があった。
【解決手段】この発明は、上記課題を解決するために、車体1に装備した傾斜センサ2の検出情報に基づいて、該車体1もしくは該車体1に対してローリング自在に連結する作業機を自動的に水平制御する制御装置3を備えた作業車両において、前記傾斜センサ2は、車体1に軸装している車輪4のホイールバランスをチエックするモードを選択すると、前記検出情報を車輪4の偏芯等を判定するチエック情報として利用できる構成とした作業車両の構成とする。
(もっと読む)
軸受の回転精度の測定装置
【課題】軸受の組立後のラジアル振れおよびアキシアル振れを高精度に測定する軸受の回転精度の測定装置を提供する。
【解決手段】内輪6の端面に当接して支持固定する内輪受け部材10と、外輪7の端面に当接して支持固定する外輪受け部材11と、この外輪受け部材11上に載置され、適宜な重量からなる重錘12と、外輪受け部材11の上側に配設されて外輪7を回転させる回転ユニットとからなる支持部3と、案内部13aと、これに対して軸受2のラジアル方向およびアキシアル方向に摺動自在にそれぞれ配設された摺動部13bと、これら摺動部13bの先端部に装着され、外輪7の外径または端面に当接する球状の測定球16aを有する測定子16と、摺動部13bに適宜な測定圧を付与するコイルばね17とからなる駆動機構13と、測定子16を介して駆動部13bの変位を読み取るレーザ変位計14とを備えている。
(もっと読む)
測定装置
【課題】長尺の真直形状や大型の平面形状を測定するために水準器に代わる道具として、被測定面に接する点と変位センサあるいは角度センサの組み合わせで多点方を実現するために、被測定面上を走査移動可能なセンサホルダを提供する。
【解決手段】被測定面に対して相対的に移動可能なセンサホルダを、被測定面に対して少なくとも2点の接点を有する形態にして、センサホルダと被測定面との2つの接点とセンサホルダの保持するセンサの測定点との3点によって、真直形状測定のための3点法と動揺の差動出力を得て、その出力から形状を求める。
(もっと読む)
61 - 80 / 150
[ Back to top ]