
Fターム[2F069GG63]の内容
測定手段を特定しない測長装置 (16,435) | 測定方式 (4,762) | 測定子の数 (697) | 2つ (150)
Fターム[2F069GG63]に分類される特許
41 - 60 / 150
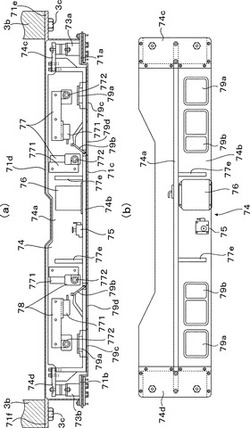
軌道検測のための検出器ユニット
【課題】
光学的変位センサを搭載する検出器ユニットを堅牢な構造にしなくても台車に取付けることが可能で一般の営業車両にも取付けることができるように小型軽量化した軌道検測のための検出器ユニットを提供することにある。
【解決手段】
この発明は、レールの横断方向、すなわち、台車の横梁方向に沿って設けた収納ケースに内装する内装フレームを水平板フレームとこれから起立する垂直板フレームで構成し、光学的変位センサは垂直板フレームの両端にそれぞれ設ける。内装フレームの両端を緩衝部材を介して収納ケースに取付け、質量が大きいジャイロを水平板フレームの中央部付近に搭載する。
(もっと読む)
測定装置

【課題】微粒子の接触体を用いて、矩形溝形状を有するマイクロマシン等の三次元形状を高精度で測定する。
【解決手段】接触体6は、可撓性の支持部材5と透明な固定部材4によってプローブ本体9に連結される。対物レンズ3にてレーザ光Gを集光させ、接触体6の底面に焦点を合わせて光放射圧によって接触体6を被測定物13の表面に接触させる。レーザ光Gを音響光学偏向器2によって偏向させることで、接触体6を任意の方向に振動させることができる。被測定物13が矩形溝形状を有する三次元構造体であっても、接触体6の振動方向を調整することで高精度な形状測定を行うことができる。
(もっと読む)
形状推定システム、サーバ装置、形状推定方法、及び、形状推定プログラム
【課題】位置が特定されていないセンサノードで検出された検出対象に関する情報から、検出対象の形状情報を推定する形状推定システムを提供する。
【解決手段】形状推定システムが、複数のセンサノードとサーバ装置とを備える。複数のセンサノードのそれぞれは、予め定められている複数のセンシングエリア内における検出対象物の有無を検出するセンサ部と、センサ部による検出結果をサーバ装置へ送信する第1の通信部とを有し、複数のセンサノードが、複数のセンシングエリアの設定条件が異なる複数種類のセンサノードからなり、サーバ装置は、複数のセンサノードから送信された検出結果を受信する第2の通信部と、複数のセンサノードから受信した検出結果と、複数のセンサノードの複数のセンシングエリアに関する情報と、複数のセンシングエリアの平均密度に関する情報とに基づいて、検出対象物の形状に関する形状情報の推定値を算出する処理部とを備えている。
(もっと読む)
関節角度計測装置
【課題】従来の関節角度計測装置は、ビデオカメラによって被験者を撮影するスペースや、画像解析を行うコンピュータ等が必要となるので、設備が大がかりなものとなり、製品コストが増大している。
【解決手段】本発明による関節角度計測装置は、例えば上腕及び前腕や腰及び上腿等の関節を挟む第1及び第2部位に第1及び第2慣性センサ1,2が取付けられ、信号処理器3の信号回路34がcos−1(X1・X2+Y1・Y2+Z1・Z2)の演算を行うことで関節の曲げ角度φを算出する構成である。
(もっと読む)
膜厚測定装置
【課題】帯状基材とローラの間に空気の巻き込みが発生した場合でも、その影響を受けず、塗膜の膜厚を測定できる膜厚測定装置を提供する。
【解決手段】膜厚測定装置100は、ローラ30上を搬送される帯状基材10の長さ方向に塗工部40から塗液44を塗工して形成された塗膜12の膜厚を測定する。この装置100は、基材10の搬送方向90に対して塗工部40よりも上流側の位置に設けられ、ローラ外表面30aから基材表面10aまでの厚みX1を測定する第1厚みセンサ50と、塗工部40よりも下流側の位置に設けられ、ローラ外表面30aから塗膜表面12aまでの厚みX2を測定する第2厚みセンサ60とを備え、第1厚みセンサ50で測定された厚みX1と、第2厚みセンサ60で測定された厚みX2との差分から塗膜12の膜厚を算出し得るように構成されている。
(もっと読む)
測定装置
【課題】被検物を高精度に測定する。
【解決手段】測定装置11の傾斜回転テーブル14は、被検物が載置され、回転軸L1を中心に回転駆動する回転テーブル21と、回転テーブル21が回転可能に装着され、水平方向に延びる傾斜軸L2を中心に傾斜駆動する傾斜テーブル22を備える。また、傾斜回転テーブル14は、傾斜テーブル22に対する回転テーブル21の変位を測定する変位センサ31乃至33と、傾斜テーブルの鉛直方向の変位を測定する変位センサ34を備える。本発明は、例えば、傾斜回転テーブルを有する測定装置に適用できる。
(もっと読む)
インストルメントパネルの取付装置及び取付方法
【課題】車室内にインストルメントパネルを高精度に取り付けることを可能にするインストルメントパネルの取付装置及び取付方法を提供する。
【解決手段】インストルメントパネルの取付装置10は、ボディ14における対称位置で左右一対の車体側測定基準部120の車幅方向位置を計測する一対の第1変位計112と、車室内に搬入される前のインストルメントパネル24における対称位置で左右一対のインパネ側測定基準部122の車幅方向位置を計測する一対の第2変位計116と、第1変位計112及び第2変位計116によって得られる信号から、平面視のボディ中心位置C1及びインパネ中心位置C2を求める演算部134と、演算部134から供給される中心差ΔCに基づいてインストルメントパネル24の車幅方向位置を調整する調整手段85とを有する。
(もっと読む)
光学式やタッチプローブ型の測定機構部及び軸体支持機構部を有する軸体測定装置及び該装置による軸体の諸元及び精度の測定方法
【課題】 一体構造の装置で任意の形状の軸体の各部の諸元,精度等を効率的に、かつ高精度に測定できる軸体測定装置及びそれによる軸体の諸元及び精度の測定方法を提供する。
【解決手段】 軸体測定装置100は軸体200の外径,真円度,振れ,偏芯,キズ等を測定する光学式測定機構部1と、軸体200の幅寸法や振れ等を測定するタッチプローブ型測定機構部2と、軸体200を支持する軸体支持機構部3と、これ等の制御部4等を一体構造に配置したものからなる。また、タッチプローブ型測定機構部2の接触子2a等の位置調整等を行う接触子補正具7が設けられている。また、測定方法の1つとして外径寸法は軸体200に光学式測定機構部1の投光部1aから光線を当てて通過光線を受光部1bで測定することにより容易に求められる。
(もっと読む)
走査運動誤差測定方法
【課題】特別な外部基準を必要としないため簡便、低コスト、迅速、低設置面積といった特徴を持つ走査運動誤差測定方法において、従来、取り除くことのできなかったスピンドル回転誤差の影響を低減できる走査運動誤差測定方法を提供する。
【解決手段】旋盤や円筒研削盤上において作製した加工対象である被加工物5をスピンドル3から取り外すことなくそのまま測定の基準として用いて、被加工物5を搭載したスピンドル3の回転中心軸4に対して工具Tと正対する位置に変位検出器Bを配置し、回転中心軸4に沿ってスライドにより走査しながら得られた変位検出器Bの出力から、回転中心軸4を基準としたスライド走査機構の持つ運動誤差を測定する装置において、回転中心軸4の整数回転分の平均を求めることにより、回転中心軸4の運動誤差の影響を低減する。
(もっと読む)
精密構成要素の公差を迅速に検証するための装置
【課題】製造及び品質レベルを大幅に上昇させる自動化又は半自動化された検査プロセスを提供すること。
【解決手段】鍵再設定可能な錠シリンダのロッキングバー、ラック及びピン、並びに他の精密公差の小型構成要素の各々を、1.5秒の平均サイクル時間で検査し、分類し、再圧印加工するための自動化された検査システムである。この検査システムは、組み合わせられたゲージ並びに目視公差チェック及び分類のために、種々のカメラ検査ステーション、機械ゲージ・ステーション及び/又は圧印加工ステーション内に構成要素を再配向する高速空気圧式分類マトリクスを含む。欠陥は目視及び機械ゲージ検査の組み合わせにより識別され、分類された構成要素は、不合格部品、合格部品、要圧印加工部品の3つの容器に分類される。検査/分類システムは、繰り返し精度0.00005906で、0.00011811”までの公差チェックが可能である。
(もっと読む)
回転角検出装置
【課題】比較的簡単な構成で、高精度な回転角の検出を実現する。
【解決手段】 本発明の回転角検出装置20は、回転体4L,4Rの回転に応じて、1回転より大きく、且つ2回転未満の範囲で回転する回転手段23と、回転手段に備えられ、回転手段の回転に応じて回転手段の回転角を示す信号パルスを発生する信号発生手段21,22と、信号パルスに基づき回転手段の回転角を検出する検出手段21,22と、回転手段の回転角に基づき回転体の回転角を演算する演算手段10とを備える。
(もっと読む)
内面検査装置とこれを備える内面加工検査装置
【課題】切削加工後の長尺シャフトなどの管状部材の内面を簡単に検査できる内面検査装置を提供する。
【解決手段】管状部材1の内面2を加工する内面検査装置であって、管状部材1を固定する固定装置10と、固定装置10により固定された管状部材1の内面2を加工する加工機20、30、40と、内面2に区画された管状部材の内部空間に位置した状態で、加工機に加工された内面2を検知する内面検査ヘッド15と、を備える。
(もっと読む)
形状測定装置
【課題】高い測定精度を有する形状測定装置を提供する。
【解決手段】形状測定装置100は、被測定物体15の形状を測定して測定値を出力するプローブ12と、所定の空間内でプローブ12を移動させる移動機構部であるアーム部11に、プローブ12を着脱する取付部16と、空間内におけるプローブ12の空間座標を測定する空間座標測定部30と、プローブ12により測定された被測定物体15の測定値を、空間座標測定部30により測定されたプローブ12の空間座標により補正する制御部20,50と、を有して構成される。
(もっと読む)
タービン発電機におけるステータコイルの接続組立の3次元形状測定方法及び3次元形状測定装置用冶具
【課題】 レーザ非接触式3次元形状測定装置と多関節接触式3次元形状測定装置を併用することで、表面形状を容易に高精度に測定することにある。
【解決手段】 タービン発電機におけるステータコイル接続組立の3次元形状を測定するに際して、レーザ非接触式3次元形状測定装置により予め設定された測定範囲におけるステータコイル接続組立の測定部位の3次元形状を測定する第1のステップ(S11)と、エンコーダが内蔵された関節により複数本のアームを連結してなる多関節接触式3次元形状測定装置により予め設定された測定範囲におけるステータコイル接続組立の測定部位の3次元形状を測定する第2のステップ(S12〜S14)と、前記第1の測定ステップで測定された3次元形状データと前記第2の測定ステップで測定された3次元形状データ及び手計測による局所的な部位の形状測定データを総合的に合成して最終的にステータコイル接続組立の設計図を起こす第3のステップ(S17,S18)とを備えている。
(もっと読む)
幾何学的タイヤ測定値のデータ品質を向上させるフィルタリング処理方法
タイヤ測定システムが生のタイヤ測定データ及び変換タイヤ測定データ(例えば、測定された半径方向又は側方回転振れ値のデータセット)をストレージする種々のメモリ/メディア要素並びにコンピュータ実行可能命令の形態をしたソフトウェアを搭載したコンピュータを含み、コンピュータ実行可能命令をプロセッサによって実行し、それにより、得られたデータセットに含まれていて、隣り合う測定値を超えて突き出ている選択された回転振れ値をフィルタリング処理し、フィルタリング処理済み回転振れ値のうちで、かかる値セット全体を包囲している凸包上に位置する選択されたフィルタリング処理済み回転振れ値を識別し、凸包上に位置する回転振れ値のうちの識別された選択回転振れ値の補間を実行してフィルタリング処理済み回転振れ測定値の最終データセットを得る。逆データセットに対して同様なステップを実行してサイドウォール変形特徴部、例えばサイドウォール窪みを一層適切に検出する。 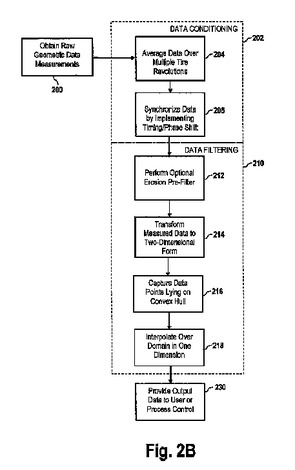 (もっと読む)
(もっと読む)
三次元形状測定装置
【課題】三次元形状測定装置において、単一の位置検出器で複数の複数の測定ミラーの変位を測定可能とする。
【解決手段】互いに平行なレーザービームが偏光ビームスプリッタ204の偏光面Eの異なる位置に入射する。一方のレーザービームは偏光面で2つに分岐して第1の測定ミラー4と参照ミラー6に入射する。他方のレーザービームは偏光面で2つに分岐して測定ミラー5と参照ミラー6に入射する。偏光ビームスプリッタ204と測定ミラー210,211の間には、測定ミラー210に向かうレーザービームを透過させ、測定ミラー211に向かうレーザービームを反射される部分反射ミラー214が配置されている。測定ミラー4,5と参照ミラー6で反射されたレーザービームの干渉から測定ミラー4,5の参照ミラー6に対する相対位置を算出する。
(もっと読む)
表裏面測定プローブ、表裏面測定装置および表裏面測定方法
【課題】被測定物の表裏面形状にかかわらず、1つのプローブで被測定物の表裏面を高精度に測定できる表裏面測定プローブ、表裏面測定装置および表裏面測定方法を提供する。
【解決手段】プローブ本体10と、両端に接触子22,23を有する検出軸20と、この検出軸20をプローブ本体10に対して検出軸20の軸方向へ移動可能に支持するガイド機構30と、検出軸20を軸方向へ移動させる駆動機構40と、検出軸20と同軸上において、検出軸20の移動位置を検出する位置検出手段50とを備える表裏面測定プローブ。
(もっと読む)
リソグラフィ装置及び測定方法
【課題】レベルセンサのプロセス依存型オフセット誤差を正確に修正する費用有効性の高い方法を提供する。
【解決手段】基板W(たとえば基板を支持するための基板テーブルを備えたリソグラフィ装置内の基板)を露光する方法には、第1及び第2のセンサ10,11を使用して少なくとも1つの基板Wの一部の第1及び第2の高さ測定を実行するステップと、測値の差に基づいてオフセット誤差マップを作成し、且つ、記憶するステップと、第1のセンサ10を使用して高さ測定を実行することによって、前記基板W(又は前記部分と類似した処理が施された他の基板)の複数の部分のハイト・マップを作成して記憶し、且つ、オフセット誤差マップによってこのハイト・マップを修正するステップと、前記基板W(又は他の基板)を露光するステップが含まれている。
(もっと読む)
リソグラフィ装置及び測定方法
【課題】レベルセンサのプロセス依存型オフセット誤差を正確に修正する費用有効性の高い方法を提供する。
【解決手段】基板W(たとえば基板を支持するための基板テーブルを備えたリソグラフィ装置内の基板)を露光する方法には、第1及び第2のセンサ10,11を使用して少なくとも1つの基板Wの一部の第1及び第2の高さ測定を実行するステップと、測値の差に基づいてオフセット誤差マップを作成し、且つ、記憶するステップと、第1のセンサ10を使用して高さ測定を実行することによって、前記基板W(又は前記部分と類似した処理が施された他の基板)の複数の部分のハイト・マップを作成して記憶し、且つ、オフセット誤差マップによってこのハイト・マップを修正するステップと、前記基板W(又は他の基板)を露光するステップが含まれている。
(もっと読む)
真直度測定方法及び真直度測定装置
【課題】 3個の変位計のゼロ点調整を高精度に行うことなく、測定対象物の表面プロファイルを算出することができる真直度測定方法を提供する。
【解決手段】 第1の方向に並び、相対位置が固定された3個の変位計と、測定対象物との一方(可動物)を他方(固定物)に対して第1の方向に移動させながら、3個の変位計から、それぞれ測定対象物の表面において第1の方向に延在する測定対象線に沿って並ぶ3つの被測定点までの距離を測定する。3個の変位計の測定結果に基づいて、可動物に対する相対位置が固定された基準点の軌跡である倣い曲線のプロファイルを算出する。倣い曲線の算出されたプロファイルの2次成分を、事前に測定されている倣い曲線のプロファイルの2次成分に基づいて補正する。補正された倣い曲線のプロファイルに基づいて、測定対象物の表面のプロファイルを算出する。
(もっと読む)
41 - 60 / 150
[ Back to top ]