
Fターム[2F069GG65]の内容
測定手段を特定しない測長装置 (16,435) | 測定方式 (4,762) | 測定子の数 (697) | 数個 (79)
Fターム[2F069GG65]に分類される特許
61 - 79 / 79
位置決め装置
【課題】 作業効率が高く、構成が簡単な位置決め装置を提供する。
【解決手段】 この位置決め装置では、2つの可動テーブル4,5の移動範囲XA,XBはオーバラップ部XOを有し、2つの可動テーブル4,5のうちのいずれか1つの可動テーブル4または5がオーバラップ部XOに進入したことに応じて、他の可動テーブル5または4がオーバラップ部XOに進入することを禁止する。したがって、可動テーブル4,5がオーバラップ部XOで衝突することを防止することができ、簡単な構成で作業効率の向上を図ることができる。
(もっと読む)
車用静電センサー
【構成】多様な形態の電極(12)を使用した乗員センサーシステムが開示されている。電極(12)はエアバッグ噴出口(44)に隣接して設置でき、それぞれの電極は乗員の近接度に対応する信号を提供する。このシステムは1信号の場合よりも適切な決定を下すことができるように複数の信号を比較するコンパレータをさらに含んでいる。電極(12)を誘電基材(16)上に形成し、電極間をブロックするように提供された接地領域(14)で分離することができる。電極(12)を、片面に導電コーティングを施した誘電材料に取り付けられた導電材料で形成することができる。電極(12)を内装体内に接地導電材料と隣接させて埋設し、1電極にDC電圧を印加して第2電極への導電通路を形成することができる。その導電通路は湿気で提供される。ドライブ電極(22)とレシーブ電極(26)は車の窓と一体的に形成することができる。  (もっと読む)
(もっと読む)
H形鋼の形状測定方法

【課題】H形鋼の長手方向の形状(曲がり、反り)を圧延ラインで走行中に測定することができるH形鋼の形状測定方法を提供する。
【解決手段】左右方向に配した一対の距離センサC1、C2あるいは上下方向に配した一対の距離センサB1、B2を用いて、走行中のH形鋼10を所定の算出区間に渡って測定し、その測定結果に基づいて、H形鋼10の長手方向の形状(曲がり、反り)を算出する。
(もっと読む)
平面度測定方法と装置
【課題】 簡単な構成で、効率的に平面度を求めることができる平面度測定方法と装置を提供する。
【解決手段】 互いに直交する方向の傾斜を検知する傾斜計12と、傾斜計12が取り付けられた本体14と、本体14の下面14aから突出した3点の測定子15,16,17と、傾斜計12により検知した傾斜を記憶しその傾斜の測定子間の距離から測定対象部位の変位を求めるコンピュータ等の演算手段とを備える。傾斜計12は、傾斜により動く電極間の静電容量の変化を2方向同時に検知する。3点の測定子15,16,17を測定対象面20に載置し、測定子15,16,17のうちの1点に対する他の2点の平面上での位置と傾斜を検知し、次に本体14を移動させて、先に検知した2点のうちの少なくとも1点に測定子16を合わせて、測定対象面20の他の点の変位を検知する。
(もっと読む)
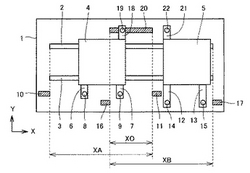
磁気軸受装置の変位検出装置
【課題】 回転体のラジアル制御軸方向およびアキシアル制御軸方向の変位を正確に検出することができ、しかも、変位センサユニットの構造が簡単で、部品点数が少なくてすみ、製作が容易で、コストダウンが可能な磁気軸受装置の変位検出装置を提供する。
【解決手段】 2組の変位センサユニット6,7のそれぞれが、回転体1のターゲット部15,17の片側の縁部に対向するとともに2つのラジアル制御軸上に位置するように周方向に等間隔をおいて配置された4個の変位センサ16a,16b,16c,16d,18a,18b,18c,18dを備えている。変位演算手段が、8個の変位センサの出力を用いて所定の演算を行うことにより、一方の変位センサユニット6の部分における2つのラジアル制御軸方向の回転体1の変位、他方の変位センサユニット7の部分における2つのラジアル制御軸方向の回転体1の変位、および回転体1のアキシアル制御軸方向の変位を求めるものである。
(もっと読む)
寸法測定システム
【課題】 携帯型測定部を無線通信不能な場所でも使用可能にした寸法測定システムの実現。
【解決手段】 端末無線装置42、寸法測定値を生成する寸法測定部21、及び寸法測定値を表示する表示器24を有する携帯型寸法測定装置16-1,16-2,16-3,16-4と、ベース無線装置35を有するベース装置10とを備え、携帯型寸法測定装置は、生成した寸法測定値をベース装置10に送信する寸法測定システムであって、携帯型寸法測定装置は、端末無線装置がベース無線装置に対して通信可能であるかを検出する無線通信状態検出回路を備え、通信不能状態の時には、寸法測定値をベース装置に送信する動作を自動的に停止すると共に寸法測定値を表示器に表示するようにし、通信可能状態になった時に、生成した寸法測定値をベース装置に送信する動作を自動的に再開する。
(もっと読む)
寸法測定装置
【課題】 高価な表示装置を共通に使用しても操作性が低下しない寸法測定装置の実現。
【解決手段】 複数の寸法測定値を生成する複数の寸法測定部15-1,15-4;16-1,16-4と、複数の寸法測定部の生成する寸法測定値を表示する表示部11とを備える寸法測定装置であって、表示部が同時に表示できる寸法測定値の個数は、複数の寸法測定部の生成する寸法測定値の個数より少なく、表示部に表示する寸法測定値を、複数の寸法測定部の生成する寸法測定値に応じて自動的に選択する表示制御部を備える。
(もっと読む)
磁気軸受装置の変位検出装置
【課題】 回転体の軸方向の変位を正確に検出することができ、しかも、アキシアル変位センサユニットの構造が簡単で、部品点数が少なくてすみ、製作が容易で、コストダウンが可能な磁気軸受装置の変位検出装置を提供する。
【解決手段】 2組のラジアル変位センサユニット6,7のそれぞれが、回転体1の外周部のターゲット部15,17に対向するように周方向に等間隔をおいて配置された4個のラジアル変位センサ16a,16b,18a,18bを備え、1組のアキシアル変位ユニット8が、回転体1の外周部のターゲット部17の軸方向両縁部に対向するように軸方向に間隔をおいて配置された1対のアキシアル変位センサ19a,19bを備えている。変位演算手段が、ラジアル変位センサの出力より回転体1の径方向の変位を演算し、アキシアル変位センサの出力より演算した値をラジアル変位センサの出力に基づいて補正することにより回転体1の軸方向の変位を演算する。
(もっと読む)
被測定物の振れ測定装置及び方法
【課題】段取り作業の効率化を図ると共に、測定精度を向上させることにある。
【解決手段】モータ1により水平回転駆動される回転テーブル2上にその中心軸に直交する回転平面上で互いに直交するX方向及びY方向に移動可能な移動調整テーブル4を載せ、その上に被測定物10を支持する複数個のジャッキ3が搭載テーブルを載せて構成された回転部と、複数のアームを鉛直方向に移動可能に、且つ水平方向に移動可能にそれぞれ支持し、これら各アームの先端部に被測定物の面や円弧面を計測する測定器8を取付けて構成された測定器移動部と、回転テーブル2の回転軸線上で互いに交差するスリット状の複数のレーザ光を照射するレーザ発生器9と、被測定物の予定角度位置での面の高さや円弧面における半径方向の長さの測定値がそれぞれ取込まれ、被測定物の傾き量や回転テーブルの中心に対する被測定物の中心の偏心量を求める演算処理部20と備える。
(もっと読む)
レーザクラッド加工用金属粉末の落下位置計測装置および落下位置計測システム、ならびにレーザ照射位置計測装置
【課題】レーザクラッド加工における金属粉末の落下位置を物理的に計測するための金属粉末落下位置計測装置粉末落下位置計測装置を提供する。
【解決手段】仕切り板11によって複数の空間12に仕切られ、各空間12には目盛り15の付いた透明窓14を設けて、各空間12に投入された金属粉末量を計測できるようにした。各空間の金属粉末量の割合から金属粉末の落下入りのずれ量が計測できる。
(もっと読む)
測定装置、測定方法、測定システム、測定プログラム、および測定プログラムを記録した記録媒体
【課題】 複雑な気液二相流の界面微細構造と輸送機構を解明できる測定装置を提供する。
【解決手段】 測定装置は、気液二相流中に配置され、該気液二相流における気相および液相を検出するセンサからの出力信号を受信するセンサ出力受信部と、上記センサ出力受信部によって受信された出力信号に基づいて、上記気液二相流における気相と液層との間の界面に関する物理特性を算出する測定演算部とを備える。測定演算部は、6つのセンサから、4つのセンサからなるセンサセットを3セット分設定し、センサ出力受信部は、各センサからの出力信号を受信する。そして、測定演算部は、各センサからの出力信号に基づいて、上記界面の3次元速度を算出する。
(もっと読む)
座標測定装置ならびに座標測定装置を用いて測定する方法
【課題】座標測定装置ならびに座標測定装置を用いて測定する方法
【解決手段】本発明は座標測定装置(10)を用いて加工物の幾何形状を測定する方法およびこの装置自体に関する。本発明によれば、測定作業は異なる種類の装置を必要とすることなく最適に実行され、これにより関連作業に対して最適利用である1つまたは複数のセンサを使用できる。
(もっと読む)
位置検出装置
【課題】ベッド上に滞在する被験者の胴体、特に胸の位置を正確に検出することのできる位置検出装置を提供する。
【解決手段】被験者が滞在するベッド1の対向する部分に配され、前記被験者の生体信号を検出するための基本波形信号を検出する少なくとも1対の波形検出手段と、一方の波形検出手段7〜12によって検出された基本波形信号又は基本波形信号から算出された生体信号の振幅を検出する第1の振幅検出手段と、他方の波形検出手段によって検出された基本波形信号又は基本波形信号から算出された生体信号の振幅を検出する第2の振幅検出手段と、前記第1の振幅検出手段によって検出された振幅と、前記第2の振幅検出手段によって検出された振幅とに基づいて、前記基本波形信号の発生源を設定する発生源特定手段とによって構成され、生体信号としては、呼吸信号及び/若しくは体動信号である位置検出装置。
(もっと読む)
パイプラインの形状計測評価方法及びその装置
【課題】 重力鉛直偏差による重力誤差を極力抑え、長距離の測定でも十分な精度を確保することの可能なパイプラインの形状計測評価方法及びその装置を提供する。
【解決手段】 ピグ本体を静止状態として静止状態における加速度計の加速度データを取得し、その加速度データから重力方向を求め、この重力方向と地上の現在地点における緯度とから、パイプラインの線形形状の計測を開始する際に必要なピグ本体の初期姿勢角を算出し、この初期姿勢角を、加速度データから求められる重力方向と地球を密度一様な楕円体と仮定した場合の重力方向との偏差に基づく補正角によって補正し、その補正後の初期姿勢角を用いてパイプラインの線形形状を求める。
(もっと読む)
パイプラインの形状計測評価方法及びその装置
【課題】 長距離の計測においても精度の高い線形計測が可能なパイプラインの形状計測評価方法及びその装置を提供する。
【解決手段】 パイプラインの始点及び終点におけるピグ本体の姿勢を予め取得しておき、始点におけるピグ本体の姿勢に対して、ピグ本体の走行によって得られた姿勢変化角を順次累積して始点から終点までの順方向の姿勢データを求めるとともに、終点におけるピグ本体の姿勢に対して、ピグ本体の走行によって得られた姿勢変化角を順次累積して終点から始点までの逆方向の姿勢データを求め、順方向の姿勢データと逆方向の姿勢データとを用いて姿勢誤差を低減した姿勢データを再計算し、再計算後の姿勢データを用いてパイプラインの線形形状を求める。
(もっと読む)
相補的なセンサを用いた測定処理制御のための方法および装置
【解決手段】 ウエハの層の厚さを検出するための方法が提供されている。その方法は、処理されるウエハを保持するよう構成されたウエハキャリアの特定の半径の規定を備える。その方法は、さらに、1組の相補的なセンサを形成するよう構成された複数のセンサの準備を備える。さらに、その方法は、複数のセンサの内の各センサと、隣接するセンサとの位相が、同じ角度だけずれるように、ウエハキャリア内の特定の半径に沿う複数のセンサの配置を備える。その方法は、さらに、複数のセンサによって生成された信号の測定を備える。さらに、合成信号を生成するために、複数のセンサによって生成された信号の平均化が備えられている。平均化は、合成信号が、層の厚さを特定するよう相関を有することができるように、合成信号からノイズを除去するよう構成されている。  (もっと読む)
(もっと読む)
シリンダボア測定装置
【課題】 本発明は、シリンダの上下両面ともに開口されていないシリンダボアの測定が可能なシリンダボア測定装置を提供することを課題とする。
【解決手段】 シリンダ軸52に平行な貫通穴43をシリンダヘッド部14に有するエンジン10のシリンダ11を測定対象とし、シリンダ11の内径53を測定するシリンダボア測定装置40であって、このシリンダボア測定装置40は、貫通穴43にシリンダ11内部からエンジン外へ移動可能に挿入した操作子44と、この操作子44の一端44aに取付けることで、シリンダ11内部に配置する測定ヘッド42と、この測定ヘッド42に取付け、シリンダの内面 までの距離を測る測定子41・・・とからなり、予めシリンダ11内に測定ヘッド42及び測定子41・・・を納め、外から操作子44を操作しながら測定を実施することで、両端が閉じた状態のシリンダ11の内径を測定する。
(もっと読む)
二重積分によって計算された測定に関連した絶対位置測定を使用することにより固体の移動を検出するための方法
本発明は、二重積分によって計算された測定に関連した絶対位置測定を使用して、固体の移動を検出するための方法に関するものであって、例えば、人体の移動の検出を意図している。本発明による方法においては、固体(2)の加速度を測定し、この測定の二重積分を行い、これにより、固体の第1並進移動に関する順次的な値を獲得し、さらに、特に回転といったような固体の少なくとも1つの第2自由度に関するの絶対位置測定を行う。本発明においては、回転測定を、並進移動測定へと変換し、並進移動測定を使用して第1並進移動を修正する。  (もっと読む)
(もっと読む)
距離変化出力装置及び方法
【課題】 プローブカードとテストヘッドとの距離の経時変化を検出する。
【解決手段】 ウエハプローバ1のプローブカード3と半導体集積回路試験装置のテストヘッド2との距離を検出する距離センサ6と、該距離センサ6の距離検出値を時系列的な距離データとして順次記憶するメモリ7aと、該メモリ7aに記憶された距離データを時系列順に一覧表示するディスプレイ7cとを具備する。
(もっと読む)
61 - 79 / 79
[ Back to top ]