
Fターム[2F069JJ25]の内容
測定手段を特定しない測長装置 (16,435) | 走査 (1,064) | 走査手順 (43) | 連続的 (20)
Fターム[2F069JJ25]に分類される特許
1 - 20 / 20
テープギャップ測定のためのポータブルゲージ及びその方法
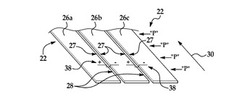
【課題】テープギャップの手動測定は労働集約的であるため、構造物の大きな領域にわたる複数のテープギャップの測定を正確かつ効率的に実行し、しかもオペレーターの技能に大きく依存しないテープギャップの測定方法及び装置を提供する。
【解決手段】表面を構成する複合テープの細片間のギャップはゲージによって測定される。表面に沿ってゲージを移動するにつれて隣接するテープ細片のエッジの位置は検出され、隣接する細片間のギャップは検出したエッジの位置に基づいて計算される。
(もっと読む)
光学走査プローブ

【課題】対象物を光ストライプで照射し、対象物表面から反射した光を検出することで、対象物の表面上の複数の点からデータを捕捉するための走査プローブを提供する。
【解決手段】走査プローブは、(a)光ストライプを生成および発するためのストライプ生成手段14、(b)対象物表面から反射した光ストライプを検出するための画素の配列を有する画像センサを備えるカメラ16、(c)カメラ16によって検出された強度に応じて、フレームの取得中に光ストライプの強度を調節するための手段を備える。ストライプ長を修正する手段、処理手段のための隔離された区分室、およびスキャナのための取り付け可能なダストカバーを有するスキャナにも関する。
(もっと読む)
位置検出装置、および画像形成装置
【課題】温度変化が生じても、マークの位置を正確に検出すること。
【解決手段】転写ベルト10上のマーク5を検出する光ピックアップ6a、6bと、光ピックアップ6a、6bを収容するケース1011、1012と、ケース1011、1012を固定位置1021、1022に固定して保持する回路基板1005とを備え、固定位置1021、1022を含む面であって、転写ベルト10の移動方向に垂直な面である固定位置面から、検出位置1031、1032を含む面であって、転写ベルト10の移動方向に垂直な面である検出位置面までの、ケース1011、1012における部位の温度変化による転写ベルト10の移動方向に平行な方向の膨張量の合計である総膨張量と、回路基板1005における固定位置1021、1022の間の部位の温度変化による膨張量とが略同一であること。
(もっと読む)
路面性状測定装置
【課題】一台でキメ深さやIRIを測定できる多機能の路面性状測定装置であって安価かつ高精度なものを車載可能とすべく、移動距離計の測定値からタイヤ変形等の悪影響が取り除かれるようにする
【解決手段】車両に移動距離計15と高さ計16と高さ計51と演算部20とを搭載する。高さ計16,51には、排水用凹部の開口幅より短い第一基準長Nに対応した狭い範囲を測定するものを、採用する。演算部20は、移動距離測定値ΔSと高さ測定値K,Jとに基づき踏面算出を行って第二基準長M対応のIRIを算出し、移動距離測定値ΔSと高さ測定値Kとに基づき踏面算出を行わないで第一基準長N対応のキメ深さ等を算出し、更に基準長Mだけ離れた高さ計16,51での路面形状について相関を算出して選択的に移動距離測定値ΔSを校正する。
(もっと読む)
電機子コアの検査方法及び検査装置
【課題】 容易且つ高精度に形状公差を検査することが可能な電機子コアの検査方法を提供すること。
【解決手段】 波形計測部15は、各コアシートの切断面、詳しくはその厚み方向において異なる複数の計測箇所に臨むように各々配置された複数のセンサ2の出力する各波形信号Sa〜Scに基づいて、各計測箇所における各々の凹凸変化を示す複数の計測データDa〜Dcを生成する。演算部16は、波形計測部15から入力された各計測データDa〜Dcをそれぞれ予め設定された複数の区間に区分し、その各区間毎に破断部に起因するノイズ成分の有無を判定することにより、その有効/無効を評価する。そして、かかる評価に基づいて各区間毎の有効な区間データを抽出し、その各区間データを合成することにより破断部に起因するノイズを含まない検査データDtを生成する。
(もっと読む)
スピンドルの制動装置および測定器
【課題】スピンドルの操作性および耐久性を向上させることのできるスピンドルの制動装置および測定器を提供すること。
【解決手段】制動装置600は、スピンドル300が移動するシリンダ610と、このシリンダ610内を2つに区画するピストン620と、スピンドル300とピストン620とを、軸方向および軸直交方向に対し一定のクリアランス633を介して連結する連動手段660と備え、連動手段660は、ピストン620に形成された中空室623と、スピンドル300の他端に設けられ、他端側が中空室623内に係合収納される係合部630とを含み構成され、スピンドル300が一端側へ移動する際には、係合部630が中空室623の一端側内壁に当接し、かつ、他端側へ移動する際には、係合部630が中空室623の他端側内壁に当接するように形成されている。
(もっと読む)
走査型プローブ顕微鏡及び走査方法
【課題】 試料表面の凹凸形状によらず、精度よく探針と試料表面とを近接または接触させることが可能な走査型プローブ顕微鏡及び走査方法を提供すること。
【解決手段】 試料表面Sに平行な2方向の走査及び試料表面Sの垂直方向の移動を試料表面Sに対して相対的に行う探針2と、探針2及び試料表面Sの距離に応じて変化する測定量を検出する検出手段4と、探針2が試料表面Sに近接または接触した時点における観測データを採取する観測手段6と、2方向の走査及び垂直方向の移動を制御する制御手段5とを備え、探針2を試料表面Sに対して相対的に所定距離で接近離間させる接近離間駆動部24を備え、検出手段4が、接近離間駆動部24による接近時と離間時とにおける前記測定量の変化率を検出し、該測定量の変化率が、予め設定された閾値を超えるときに、観測手段6が前記観測データを採取する。
(もっと読む)
パイプラインの形状計測評価方法及びその装置
【課題】 長距離の計測においても精度の高い線形計測が可能なパイプラインの形状計測評価方法及びその装置を提供する。
【解決手段】 パイプラインの始点及び終点におけるピグ本体の姿勢を予め取得しておき、始点におけるピグ本体の姿勢に対して、ピグ本体の走行によって得られた姿勢変化角を順次累積して始点から終点までの順方向の姿勢データを求めるとともに、終点におけるピグ本体の姿勢に対して、ピグ本体の走行によって得られた姿勢変化角を順次累積して終点から始点までの逆方向の姿勢データを求め、順方向の姿勢データと逆方向の姿勢データとを用いて姿勢誤差を低減した姿勢データを再計算し、再計算後の姿勢データを用いてパイプラインの線形形状を求める。
(もっと読む)
走査型プローブ顕微鏡及びそれを用いた計測方法
【課題】
探針走査機構の各駆動軸の真直誤差を低減して探針位置決め精度を向上させることによって、走査型プローブ顕微鏡の計測精度を向上させる。
【解決手段】
探針を試料表面に近接または接触させて前記試料表面を走査することにより前記試料表面の形状を計測する走査型プローブ顕微鏡において、試料を載置して少なくとも1軸方向に移動可能な試料ステージと、該試料ステージに載置された試料の表面に近接または接触させて前記試料表面を走査する探針と、該探針を3次元方向に駆動する探針駆動手段と、前記探針のたわみを検出するたわみ検出手段と、対物レンズを有して該対物レンズのほぼ光軸上に配置された前記探針及び前記試料を観察する観察手段とを備え、前記探針駆動部を、前記対物レンズの光軸に対して対称に配置された対を成す駆動源を3組備えて構成した。
(もっと読む)
平行出し装置および平行出し方法
【課題】被測定物の測定面と測定機の測定方向との平行出しを、効率よく行うことのできる平行出し装置、および、平行出し方法を提供すること。
【解決手段】被測定物に並列した移動案内体と、移動案内体に沿って移動するスライダとを備える。スライダの移動位置におけるスライダ移動位置、および、測定物の測定面位置を、スライダに備えられた光電式リニアスケール5、および、センサ6によって検出し、これらを基に、CPU71は、スライダの移動方向を基準とする測定面の傾き直線を演算し、傾き直線から揺動支点の調整基準値を設定し、調整基準値をメモリ72に記憶させ、記憶させた調整基準値、および、センサ6によって検出される測定面位置の差を調整量として算出する。調整量はモニタ8に表示され、作業者は、表示された調整量に従って移動案内体の姿勢を調整する。
(もっと読む)
パイプラインの形状計測評価方法及びその装置
【課題】 重力鉛直偏差による重力誤差を極力抑え、長距離の測定でも十分な精度を確保することの可能なパイプラインの形状計測評価方法及びその装置を提供する。
【解決手段】 ピグ本体を静止状態として静止状態における加速度計の加速度データを取得し、その加速度データから重力方向を求め、この重力方向と地上の現在地点における緯度とから、パイプラインの線形形状の計測を開始する際に必要なピグ本体の初期姿勢角を算出し、この初期姿勢角を、加速度データから求められる重力方向と地球を密度一様な楕円体と仮定した場合の重力方向との偏差に基づく補正角によって補正し、その補正後の初期姿勢角を用いてパイプラインの線形形状を求める。
(もっと読む)
高さデータ推定方法、高さデータ推定用プログラム及び3次元形状測定装置
【課題】 被測定物の測定面の任意の位置における高さデータを高精度にて推定する高さデータ推定方法、高さデータ推定用プログラム、及び3次元形状測定装置を提供する。
【解決手段】 複数のサンプリング位置における高さデータに関して、設計データと測定データとの誤差値を求め(S6)、求まった誤差値にて形成される形状の関数を求める(S6)。そして、該関数に基づいて、被測定物の測定面の任意点における推定誤差値を求めるようにしている(S7)。したがって、上記推定誤差値の精度は、測定データの高さデータに基づき作成される面の曲率半径及び傾斜面角度とは無関係となり、一定となる。よって、従来に比べて、高い精度にてなる推定誤差値を得ることが可能となる。
(もっと読む)
表面段差測定方法および表面段差測定装置
【課題】基板自体のうねりや反り、さらには機械的な精度等による測定誤差等の疑似段差成分を精度良好に除去することができ、これにより高精度な表面段差分布を得ることが可能な表面段差測定方法を提供する。
【解決手段】基板の表面段差分布を測定する表面段差測定方法であり、表面段差分布を測定する測定領域とその周辺領域とを含む領域において表面段差のない平坦部における基板の表面高さを測定することにより、測定領域に関して表面段差の影響を含まない第1の表面段差分布を得る(S1)。測定領域内の全面において基板の表面高さを測定することにより、測定領域に関して前記表面段差の影響を含む第2の表面段差分布を測定する(S2)。第2の表面段差分布から第1の表面段差分布を取り除くことにより、測定領域における基板の表面段差分布を得る(S3)。
(もっと読む)
形状測定装置および形状測定方法
【課題】被測定面の形状測定を行う前の演算による測定シミュレーションによって、プローブと測定治具等との干渉の有無を確認することで、実際の形状測定におけるプローブ干渉によるトラブルを防ぐ。
【解決手段】ステップS2において、被測定物を保持する測定治具に設けられた基準球によって形状測定装置に対する被測定物の取付状態を検出し、座標変換を行ったうえで、被測定物の設計形状データD2、測定治具形状データD3等を用いた演算による測定シミュレーションを行い、測定治具や、被測定物の被測定面以外の面に対するプローブ干渉の有無を確認したうえで、走査中のプローブ傾斜角度を算出し、ステップS12の形状測定工程におけるプローブ走査速度を自動設定する。
(もっと読む)
無端ベルト用エレメント検査方法及び検査装置
【課題】 検査の手間を省き、且つ、アセンブリを分解することなく、しかも、検査結果の再現性を高めるようにした無端ベルト用エレメント検査方法及び検査装置を提供する。
【解決手段】 ベルト式無段変速機に用いられる無端ベルト(1)の構成部品であるエレメント(3a)の検査装置(10)において、前記無端ベルトに周回運動を与える運動付与手段(13)と、周回運動中の前記無端ベルトのエレメントの積層周期を計測する計測手段(15、17)と、前記計測手段の計測結果を所定の基準周期と比較して前記エレメントの積層異常箇所を判定する判定手段(18)とを備えたことを特徴とする。
(もっと読む)
顕微鏡装置
【課題】 カンチレバーを容易に交換することができ、かつ光学像の十分な鮮明度および解像度を確保することができる顕微鏡装置を提供する。
【解決手段】 保持機構400はカンチレバー保持機構400Aおよびミラー保持機構400Bから構成されている。カンチレバー保持機構400Aは保持機構保持部11cの下部からZ方向に延びるように設けられている。カンチレバー保持機構400Aは、その下端部においてカンチレバー100を着脱可能に保持する。ミラー保持機構400Bは側壁部11Aの内面11xからX方向に延びるように設けられている。ミラー保持機構400Bは、先端部においてミラー固定部材450を着脱可能に保持する。ミラー固定部材450にはミラー25が固定されている。カンチレバー保持機構400Aとミラー保持機構400Bとは互いに分離されている。
(もっと読む)
直流電動機の整流子診断方法及び装置
【課題】 直流電動機を構成する整流子の整流子面の良否を直流電動機稼働中に診断することのできる方法及び装置を提供する。
【解決手段】 本発明は、整流子2と整流子2に摺接して電流を供給するブラシ3とを具備する直流電動機の整流子診断装置1であって、ブラシ3の整流子2との摺接面31に対向する表面32の変位量を測定する変位量測定装置11と、整流子2の回転位相を検出する回転位相検出装置12と、回転位相検出装置12で検出した所定の回転位相毎に変位量測定装置11で測定した変位量を取り込み、当該取り込んだ変位量の大小に基づいて整流子面の良否を診断する信号処理装置13と、を備えることを特徴とする。
(もっと読む)
走査形プローブ顕微鏡
【課題】本発明が解決しようとする問題点は、走査プローブ顕微鏡で狭域の走査をする場合における、広域走査でのスキャナ駆動回路の持つノイズやドリフトが観察像の質を悪くしていることである。
【解決手段】探針と試料との間に作用する物理量を検出する走査形プローブ顕微鏡において、探針と試料を相対的に走査するスキャナと、前記スキャナの走査領域に対応した少なくとも2個のスキャナ駆動回路と、前記少なくとも2個のスキャナ駆動回路を切り替える切替手段と、を備えた走査形プローブ顕微鏡。
(もっと読む)
板材の平坦度測定方法および装置
【課題】 大きさにばらつきのあるウェハであっても、その回転中心のずれを測定し、このずれを高速に補正することにより、その平坦度を高速高精度で測定できるようにする。
【解決手段】 板材14を保持しながら回転させ、その回転角度と外形とを測定して、板材14の形状をもとに、この板材14自体の中心からその回転中心までの位置ずれを算出する。板材14を回転させたときに、この板材14の面の方向に走査する変位センサによって、板材14の回転中心を原点とする座標系についての複数の測定点において、変位センサから板材14の表面までの距離または距離の変化を測定する。前記算出した位置ずれにより、変位センサによる測定点の位置データを、板材14自体の中心を原点とする座標系に補正する。補正した位置データに基づいて、板材14の表面における厚さむらおよび反りを算出する。
(もっと読む)
光ファイバ担持用スペーサの溝ピッチおよび溝反転角度測定装置
【課題】 複数種のスペーサの溝ピッチと反転角度の測定を可能にすること。
【解決手段】 測定装置は、周回する螺旋溝が設けられたスペーサ12,反転する螺旋溝が設けられたスペーサ13の溝ピッチおよび溝反転角度を測定する。スペーサの進行量に対応した信号を発生させる速度パルス発生器16と、螺旋溝に嵌合された回転体18と、回転角度に対応したパルス状の回転角度信号と、回転角度信号から遅延,進行した回転方向判定信号と、螺旋溝の1回転に伴う1回転パルス信号を送出する第1,2パルス発生器19,20とを備えている。演算装置22は、スペーサの種別を選別し、螺旋溝の溝ピッチを演算するとともに、回転角度および回転方向判別信号を受けて、螺旋溝の反転位置を判別し、隣接する反転位置間での前記速度パルス発生器のパルスおよび回転角度信号を計数して、螺旋溝の溝ピッチと溝角度とを演算する。
(もっと読む)
1 - 20 / 20
[ Back to top ]