
Fターム[2F069MM26]の内容
測定手段を特定しない測長装置 (16,435) | 特定の構造について言及するもの (1,066) | 案内手段;レール (120)
Fターム[2F069MM26]に分類される特許
21 - 40 / 120
測定装置及び測定方法
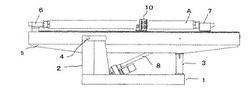
【課題】被測定物を精度良く測定が可能であるとともに、安価な測定装置を提供する。
【解決手段】長尺な被測定物Aの形状を測定する測定装置であって、ベース1と、前記ベース1の一方側に設けたビーム支持部2と、前記ビーム支持部2の上部にピン軸4によって一方側の両側部を支持し、他端側を傾動及び倒立可能に設けたビーム5と、前記ビーム5の一方端に設けられ、前記被測定物Aの一端を支持及び回転可能する支持部6と、前記ビーム5の他方端に移動可能に設けられ、被測定物の他端をクランプ及び回転可能するクランプ部7と、前記ベース1と前記ビーム5との間に設けたビーム傾動及び倒立用のアクチュエータ8と、前記被測定物Aに対向するように、前記ビーム上に移動可能に設けた寸法測定部10とを備える。
(もっと読む)
センシング方法

【課題】低コストでフレームの所定箇所の位置を求めることができるセンシング方法を提供すること。
【解決手段】センシング方法は、自動二輪車のフレーム10の測定点の位置を求める方法である。このセンシング方法は、測定装置60により、フレーム10の後方側から、このフレーム10の測定点の全てをセンシングする。この発明によれば、1台の測定装置60でフレーム10をセンシングできるから、システムを小型化でき、低コストとなる。
(もっと読む)
形状測定装置
【課題】複数の測定手段を備える形状測定装置において、各測定手段の測定範囲を広くする。
【解決手段】形状測定装置は、レーザプローブ17、画像プローブ18、タッチプローブ19の3種類のプローブを備えている。回転軸移動部13Bは、傾斜軸A1回りに回転自在に傾斜軸支持部13Aに支持されており、回転軸移動部13Bを傾斜軸A1回りに傾斜させることにより、回転テーブル13Cに設置されている被検物2を、各プローブに対して傾斜させることができる。各プローブは、各プローブの図内の左側面が、傾斜軸A1に対して略平行になるように配置されている。本発明は、例えば、形状測定装置に適用できる。
(もっと読む)
真直度測定方法及び真直度測定装置
【課題】 測定対象物の表面プロファイルを、容易に算出することができる真直度測定方法を提供する。
【解決手段】 第1の方向に並ぶ3個の変位計と、測定対象物との一方(稼動物)を他方(固定物)に対して第1の方向に移動させながら、3個の変位計から、それぞれ測定対象物の表面において第1の方向に延在する測定対象線に沿って並ぶ3つの被測定点までの距離を測定する。測定対象線に沿う表面プロファイル、可動物に固定された基準点の軌跡である倣い曲線のプロファイル、及び可動物の移動に伴うピッチング成分のプロファイルうち、2つのプロイファイルで規定される解の候補を複数個決定する。表面プロファイル、倣い曲線のプロファル、及びピッチング成分のプロファイルうち、解の候補に規定されていないプロファイルに基づいて定義される評価関数の値を適応度として、複数の解の候補に遺伝的アルゴリズムを適用し、最も適応度の高い解の候補を抽出する。
(もっと読む)
真直度測定方法及び真直度測定装置
【課題】 3個の変位計のゼロ点調整を高精度に行うことなく、測定対象物の表面プロファイルを算出することができる真直度測定方法を提供する。
【解決手段】 第1の方向に並び、相対位置が固定された3個の変位計と、測定対象物との一方(可動物)を他方(固定物)に対して第1の方向に移動させながら、3個の変位計から、それぞれ測定対象物の表面において第1の方向に延在する測定対象線に沿って並ぶ3つの被測定点までの距離を測定する。3個の変位計の測定結果に基づいて、可動物に対する相対位置が固定された基準点の軌跡である倣い曲線のプロファイルを算出する。倣い曲線の算出されたプロファイルの2次成分を、事前に測定されている倣い曲線のプロファイルの2次成分に基づいて補正する。補正された倣い曲線のプロファイルに基づいて、測定対象物の表面のプロファイルを算出する。
(もっと読む)
円形孔の内径測定装置と測定方法
【課題】測定対象物に形成された円形孔の内径を測定する技術を提供する。
【解決方法】内径測定装置10は、距離センサ12と、回転機構38と、コンピュータ20を備えている。距離センサ12は、円形孔34の内部に配置され、円形孔34の内壁までの距離を測定する。回転機構38は、円形孔34の軸36に対して角度θを成す基準軸32を中心に距離センサ12と測定対象物16を相対回転させる。コンピュータ20は、距離センサ12によって各方向で測定された距離データから、円形孔34の軸36に垂直な断面形状を特定する断面特定機能と、断面特定機能によって特定された楕円形状となる断面形状から、その短径を算出する短径算出機能を併せ持っている。内径測定装置10は、算出された楕円形状の短径を円形孔34の内径とする。
(もっと読む)
成型ドラム上のタイヤ構成部材の検査方法及び装置
【課題】 生タイヤの生産を停止させずに成型ドラム上のタイヤ構成部材を検査すること、及び検査した部材とそれを成型した生タイヤとを対応させることを可能にする。
【解決手段】 成型ドラム4にタイヤ構成部材5を貼り付けた後、成型者がジョイント合わせ等を行っている機械の待ち時間に、点観測式レーザ変位計1により、タイヤ構成部材5の表面迄の距離を測定する。その測定データと、予め測定しておいた成型ドラム4の表面迄の距離の測定データを基に、タイヤ構成部材5の断面形状データ及び貼り付け位置データを求める。求めたデータを、そのタイヤ構成部材5を用いて成型する生タイヤのバーコードとともにデータベース3に保存する。また、求めたデータとマスタデータとを比較処理部9で比較し、差が所定の閾値を越えた場合、比較結果出力部10でアラームを出力する。
(もっと読む)
ローラ形状測定装置及びそれを用いたクリアランス調整方法
【課題】ローラ面に養生フィルムを被覆したままでローラ形状を測定できる装置を提供すると共に、その装置を使用してオフラインでダミーによるクリアランス調整を行うことにより、ローラ面を傷つけることなく迅速にクリアランス調整を行うことができる。
【解決手段】直径が1m以上の冷却ローラ14のローラ面に樹脂製の養生フィルム30を被覆したままで該冷却ローラの形状を測定するローラ形状測定装置40は、金属のみに反応することによりローラ面までの距離を測定する渦電流式の変位計42と、変位計42をスライドバー44にスライド自在に支持して冷却ローラ14の幅方向に移動させる移動手段46と、変位計42での測定値とローラ面までの実測距離との関係を予め求めた検量線データを有し、変位計42で測定した測定値を検量線データに基づいて補正する補正手段と、を備える。そして、このロール形状測定装置40でオンライン測定したローラ形状結果に基づいて、冷却ローラ14と遮風板22とのクリアランス調整をオフラインで行う。
(もっと読む)
保持装置
【課題】ダイヤルを何回転も回すことなくワンタッチで保持具を操作できるようにすると共に、作業環境の悪い場所であっても該保持具により測長装置を支持体に容易に固定できるようにする。
【解決手段】支持体2に設置された測長装置の両側を保持して該測長装置を固定する保持具1A、1Bを備える。これらの保持具1A、1Bは、レバー1bの回動と共に回動して本体1aと協働して支持体2を挟んで締め付ける脚部1dを有する。この脚部1dは、本体1aと協働して支持体2を挟んで締め付ける第1の位置に回動する。また、支持体2と隙間を有してスライドの方向に測長装置を移送する第2の位置に回動する。また、支持体2の幅に対して該脚部1dの幅が狭くなって保持具1A、1Bを支持体2から取り外す第3の位置に回動する。この構成によって、何回転もダイヤルを回すことなく、ワンタッチで保持具1A、1Bを支持体2に固定、解除及び乖離できる。
(もっと読む)
金属リングの周長測定方法
【課題】金属リングの周長を精度よく測定することができる金属リングの周長測定方法を提供する。
【解決手段】金属リングWを1対のローラ2,3に掛け回し、一方のローラ3を他方のローラ2から離間する方向へ移動することにより金属リングWに張力を付与すると共に両ローラ2,3間の距離を測定し、両ローラ2,3間の距離から金属リングWの周長を算出する金属リングWの周長測定方法において、金属リングWの1つの部位P1が両ローラ2,3間の所定の位置Mにあるときに金属リングWの周長を算出した後、金属リングWの他の部位P2が所定の位置Mにあるときに金属リングWの周長を算出する処理を少なくとも1回行い、算出された全ての金属リングWの周長の平均値を金属リングWの周長とする。金属リングWの周長を算出する処理を少なくとも3回以上行うことが好ましい。
(もっと読む)
保管装置及び同保管装置を備えた計測装置
【課題】オイルミストや塵などの付着から不使用時にある検出手段を保護して測定精度の悪化を防止する保管装置を提供すること。
【解決手段】被検物Mの形状情報を採取するための検出手段(非接触センサ20a、タッチプローブ20b)をその不使用時に保管する保管装置であって、前記不使用時の検出手段をその周囲の雰囲気から隔てる保護手段(プローブボックス30,エアーポンプ40)と、保護手段に供給されるクリーンエアーの浄化を行う集塵手段44を備える。
(もっと読む)
スパイラル鋼管の製造方法および形状測定装置
【課題】スパイラル鋼管の製造工程において、鋼帯の成形・溶接後の鋼管の形状をオンラインで計測可能であるとともに、現状の設備を活用し極力簡単な設備改造で計測可能なスパイラル鋼管の製造方法および形状測定装置を提供する。
【解決手段】このスパイラル鋼管の形状測定装置は、鋼帯2を内面ローラー4および外面ローラー4を備える成形装置3を用いて管状に成形した後、鋼帯2の幅方向端面突合せ部をサブマージアーク溶接して鋼管7にするスパイラル鋼管の製造方法の溶接工程に用いられるスパイラル鋼管の形状測定装置であって、内面ローラー4を支持するマンドレル1の先端部に設けられて鋼管7の内面までの距離を非接触で測定する距離計17と、距離計17を鋼管7の周方向に回転させるモータ15と、距離計17の回転角を計測する回転角計測手段とを備えている。
(もっと読む)
位置決め装置
【課題】特定のエリアでは高い位置決め精度を確保しつつ、全体として比較的安価な位置決め装置を提供する。
【解決手段】 位置制御されるスライダ1と、このスライダ1と対向する面に磁極の歯が形成されてスライダ1と平面モータを構成するプラテン10とを備えた位置決め装置において、
スライダ1の位置を検出するレゾルバ30a〜30c(以下レゾルバ30とする。)と、
プラテン10の特定のエリアAにおけるスライダ1の位置をレゾルバ30よりも高い精度で検出するレーザ干渉計20a,20b(以下レーザ干渉計20とする。)と、
スライダ1の位置に応じてレゾルバ30またはレーザ干渉計20のいずれかの位置検出装置を選択する切替スイッチ100cと、
位置指令値および切替スイッチ100cで選択された位置検出装置で検出される位置検出値に基づいてスライダ1の位置制御を実行する位置制御部102と、
を備えたことを特徴とする位置決め装置。
(もっと読む)
形状測定装置
【課題】高い操作性を有する新たな形状測定装置を提供する。
【解決手段】形状測定装置は、被測定物60を挟んで対向配置される少なくとも2台の駆動機構付き測定機CMM1,CMM2と、これらの測定機ごとにそれぞれ対応して接続される少なくとも2台の操作コントローラ51,52と、を備えるものである。そして、操作コントローラ51,52のそれぞれは、非接続の測定機CMM2,CMM1を含むすべての測定機を操作可能に構成されている。また、操作コントローラ51,52は、切替ボタン53,54を有しており、この切替ボタンを切り替えることによって操作対象となる測定機を選択可能となっている。
(もっと読む)
形状測定装置
【課題】複数台の測定機間での振動の影響を排除した上で高い操作性と測定精度を実現した新たな形状測定装置を提供する。
【解決手段】形状測定装置は、被測定物50を挟んで対向配置される少なくとも2台の駆動機構付き測定機CMM1,CMM2と、これらの測定機ごとにそれぞれ対応して接続される少なくとも2台の制御装置41,42と、を備えるものであって、前記制御装置41,42は、測定機CMM1,CMM2の動作状態を検出自在であるとともに、制御装置41,42ごとで連携を取り合うことにより、一の測定機CMM1の動作状態の検出結果に応じて他の測定機CMM2に対する動作指令を発信自在である。
(もっと読む)
球面形状測定装置および球面形状測定方法
【課題】 非接触で球面形状を高精度に測定できる球面形状測定装置および球面形状測定方法を提供する。
【解決手段】 軸部1bの一端に球面形状部1aを有する被測定物1を、被測定物支持手段10により軸部1bの中心軸回りに回転させる。球面形状部1aの表面位置を非接触で測定する非接触変位計31を、その中心軸上の所定位置を回動中心として軸部1bの中心軸を含む平面内で、変位計回動手段32により回動させる。被接触変位計31の軸方向位置は軸方向位置調整手段41で調整する。これにより、被測定物1を回転させながら、その軸部1bの中心軸を含む平面内で前記球面形状部1aの中心を回動中心として非接触変位計31を回動させて、球面形状部1aの球面形状測定を行う。
(もっと読む)
測定装置
【課題】スケール、スケールベース、及びベースの熱膨張等による伸縮で生じるスケールベースの変形を防いで、スケールによる高精度な変位測定を可能とする。
【解決手段】スケールベース112は、スケール116で測定される測定方向(Y方向)の複数箇所P1、P2、P3でベース110に固定され、該固定される箇所P1、P2、P3間のスケールベース116にスリット114が設けられ、前記スケール116は該スケールベース112の該固定される箇所P1、P2、P3の2箇所以上において該スケールベース112により支持され、且つ、該スケールベース112は、該固定される箇所P1、P2、P3以外の位置において該ベース110との間、及び該支持する箇所以外の位置において該スケール116との間、のそれぞれに空隙S1、S2、S3を有する。
(もっと読む)
位置検出システム及び位置検出方法
【課題】長距離を移動する移動体の位置を精度良く検出できる位置検出システムを提供する。
【解決手段】両面に反射面が形成された反射板6が、クレーン本体2の移動経路に沿って、間隔が全て異なるようにして複数配置される。反射板支持フレーム5に内蔵される姿勢状態検出装置は、各反射板6の姿勢状態を検出する。測距装置3は、クレーン本体2と共に移動し、移動経路における前後方向に測定波を出射し、各方向について、反射板6によって反射された測定波の反射波を検出することで、当該反射板6までの距離を計測する。制御装置7は、測距装置3の計測結果と、姿勢状態検出装置の検出結果と、に基づいて、クレーン本体2の現在位置を求める。反射板6は、クレーン本体2が接近した際、測定波を反射可能な姿勢からクレーン本体2の通過を妨げない姿勢に切り替わる。
(もっと読む)
基板処理装置及び基板処理装置の制御方法
【課題】基板の走査中に生じるヨーイング等の誤差を補正することができると共に、基板処理手段が基板の所定位置に精度よく処理を施すことができる基板処理装置等の提供。
【解決手段】基板Pを固定する基板保持部11を載置する、Y軸方向に離れた基板搬送部22a及び22cのベース構造体2上の位置を測定することによって、間接的に基板P上のY軸方向に離れた2箇所の位置のそれぞれと、ガントリ3とのX軸方向の距離を測定する位置測定ユニット13a及び13bと、位置測定ユニット13a及び13bが測定した2つの距離が異なる場合に、該2つの距離が同じになるように基板搬送部22a〜22dを制御する走査制御部5と、基板Pとガントリ3とのX軸方向の距離を測定する相対位置測定部29とを備え、ガントリ3に搭載されたヘッドユニット25は、相対位置測定部29が測定した距離に基づくタイミングで、基板Pにインク塗布を行う。
(もっと読む)
近接露光装置及び基板の製造方法
【課題】1軸方向にのみ移動可能なワークステージを備える簡素な機構の近接露光装置において、ワークステージに搭載された基板の平坦度を2次元で精度よく測定することができる近接露光装置を提供する。
【解決手段】基板Wを保持して一軸方向(例えば、X方向)に移動可能なワークステージ1と、マスクステージ2上に配置されてセンサ駆動機構47によりワークステージ1の移動方向と直交する方向(例えば、Y方向)に移動されるギャップセンサ40とを備え、ワークステージ1及びギャップセンサ40を互いに直交する方向に移動させて基板Wの平坦度を2次元で測定する。
(もっと読む)
21 - 40 / 120
[ Back to top ]