
Fターム[2F069NN09]の内容
測定手段を特定しない測長装置 (16,435) | 信号処理 (1,324) | 最大値、最小値を検出するもの (65)
Fターム[2F069NN09]に分類される特許
21 - 40 / 65
積層鉄心の積みズレ測定方法及び測定装置並びにコンピュータプログラム
【課題】積層鉄心の積みズレ測定方法及び測定装置において、積層鉄心の積層面における積みズレの測定を高精度且つ迅速に行う。
【解決方法】積層鉄心の積みズレ測定方法は、積層方向に沿って、積層鉄心(1)の積層面のプロファイルを取得する工程と、プロファイルのうち傾きの絶対値が所定の閾値を超える領域を鉄心間の谷間であると特定する工程と、プロファイルを特定された谷間を境界としてサブプロファイルに分割する工程と、サブプロファイル毎に波形の極大値を算出する工程と、算出された極大値のうち、最大のものと最小のものとの差異を積みズレとして算出する工程とを備える。
(もっと読む)
レール車両の、少なくとも一つの輪軸を有している台車の状態を監視するための方法
本発明は、レール車両の、少なくとも一つの輪軸(4)を有している台車(3)の状態を監視するための方法に関する。本方法では、輪軸(4)の車輪(8)は軸(6)によって固く結合されており、且つ、ほぼ円錐形の車輪輪郭を有しており、台車に配置されているセンサ手段(10)から供給される信号から、車輪(8)の円錐形の車輪輪郭を基礎としている、台車(3)の輪軸(4)の蛇行動に対応する信号がフィルタリングされて取り出され、蛇行動の周波数(f)が、その都度存在している車両速度(v)のような周囲条件を基準にして求められ、蛇行動の周波数(f)に関して記憶されている、存在している周囲条件に対して典型的な値又は値領域と比較され、測定された前記周波数(f)の、該周波数(f)に関して記憶されている値又は値領域からの偏差が監視される。 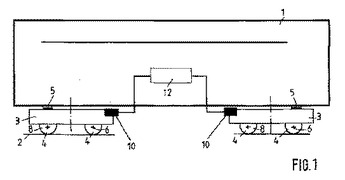 (もっと読む)
(もっと読む)
三次元道路中心線データの生成方法およびその装置

【課題】三次元走行軌跡をもとに三次元道路中心線データを自動生成する。
【解決手段】道路走行時に取得した位置センサの走行軌跡を、平面線形として生成された平面走行軌跡から、制御点検出手段は制御点を検出し、平面線形の生成において円弧検出手段が制御点に関連して円弧を検出し、縦断線形の生成においては放物線検出手段が放物線に近似させた円弧を検出し、平面線形の生成においては緩和曲線検出手段が円弧につながる緩和曲線を検出し、直線検出手段は前記検出した制御点、円弧、緩和曲線から直線を検出するから、これらの制御点、円弧、緩和曲線、直線をつないだ線を平面線形、縦断線形の中心線として滑らかに生成することができる。
(もっと読む)
測定装置
【課題】移動しながら同一の被測定物を複数回測定したときに正しい高さ得る。
【解決手段】測定間隔算出部21は、速度センサ部13によって測定された車両1の速度測定値から、距離センサ部14が1つの被測定物100を複数回測定可能な測定時間間隔を算出し、指示部22は、算出された測定時間間隔で測定を行なうよう距離センサ部14へ指示する。判断部24は、距離センサ部14から出力された距離測定情報から、測定の対象とする被測定物と、実際に測定した被測定物100の形状が一致するか否かを判断し、形状が一致すると判断した場合、被測定物100を測定したときに連続して得られた距離測定情報の中から最小の距離を示す距離測定情報を選択し、これを正しい距離測定情報とする。地上高算出部26は、選択された距離測定情報で示される距離測定値に、距離センサ部14の測定の始点から地上までの距離を加算し、被測定物100の地上高値を算出する。
(もっと読む)
特定部位検出方法、及び該方法を用いた試料分析装置
【課題】従来のデジタル画像相関法では負荷試験前後の試料上の同一点を探索するために輝度画像上で識別可能な模様が必要であり、こうした模様がない場合にはマーキングを行う必要があった。本発明ではこうしたマーキングを行うことなく高い精度での同一点探索を行えるようにする。
【解決手段】金属試料片では表面の平滑化処理を行っても、微細で且つ試料毎及び部位毎に相違する凹凸プロファイルが存在する。そこで、負荷試験前の試料の凹凸プロファイル(基準高さ分布)と負荷試験後の試料の凹凸プロファイル(比較対象高さ分布)とを用い(S1、S2)、デジタル画像相関法と同様の手法により相関係数の分布を求め(S3〜S8)、最大の相関係数を与える位置が同一点であるとして(S9、S10)、負荷試験前の試料上の注目点に対応する負荷試験後の試料上の点を求める。
(もっと読む)
曲形部材の加工完成度評価システム及びその方法
【課題】加工中又は加工済みの曲形部材の曲面成形過程で曲面の加工精度を確認し、加工後の形状を評価し判断できる曲形部材の加工完成度評価方法を提供する。
【解決手段】本発明に係る曲形部材の加工完成度評価方法は、計測装置により加工中又は加工済みの曲面形状を計測する段階と、計測された曲面形状のデータと設計された曲面形状のデータを入力して表面及びポイントを生成する段階と、船体製造工程のマージン部位及び面取り作業の特定の制約条件を反映して設計された曲面形状と計測された曲面形状とを整合する曲面整合段階と、曲面間の誤差量を計算する段階と、曲面形状の加工完成度を評価する段階とを含む。
(もっと読む)
ウェブ基準を使用して位相固定したウェブ位置信号
ウェブの移動エンコーダ信号を検知したウェブ基準信号に位相固定すること含む、ウェブ位置の決定を向上させるための手法。基材の長手方向軸に沿って配置された基準が検知され、対応するセンサ信号が生成される。推定ウェブ位置は、1つ以上のエンコーダ信号によって提供される。センサ信号とエンコーダ信号との間の位相差が計算され、位相差に基づいてウェブ位置の誤差が決定される。ウェブ位置の誤差信号は、ウェブ位置の決定の精度を向上させるエンコーダ信号を調整するためにフィードバックすることができる。  (もっと読む)
(もっと読む)
歯車対の評価装置及びこの評価装置を用いて最適化された歯車対
【課題】各種歯車対のバックラッシュを精度よく定量的に把握することができる歯車対の評価装置を提供する。
【解決手段】演算部6は、ギヤ歯面102G及びピニオン歯面102P上の各3次元座標データを所定の噛合回転位置で互いに関連付けギヤ101Gを基準とする円筒座標系の3次元座標データに変換する。2次元の媒介変数を用いてピニオン歯面102P上の各点を表す関数を作成し、ギヤ歯面102G上の各点に対応するピニオン歯面102P上の各点をニュートン法を用いて演算する。これらの演算により歯面のドライブ側及びコースト側の歯面間隙間情報を求め、この歯面間隙間情報に基づいてバックラッシュ情報を求める。
(もっと読む)
位置追跡システム、位置追跡装置、位置追跡方法およびプログラム
【課題】床センサにより検出される加圧位置と個々のユーザとを正確に対応付けられるようにすること。
【解決手段】床センサが計測した加圧位置をグループ化し、その重心位置をユーザの位置を示す一つの指標として用いる。そして、グループの重心位置と各ユーザの状態ベクトルとから3種類の接地モデル(右足接地モデル、左足接地モデル、両足接地モデル)を用いるパーティクルフィルタにより接地パタン(右足接地/左足接地/両足接地)を決定し、グループそれぞれにおける各ユーザの重み候補を算出する。そして、この重み候補を用いて、グループとユーザの対応関係を決定する。
(もっと読む)
トロイダル面評価方法
【課題】トロイダル面の形状を表す曲率半径等のパラメータを精度よく算出する。
【解決手段】評価対象のトロイダル面を三次元測定器等を用いて形状測定し、2つの曲率半径や軸の回転・傾きの実測値を求める(S1、S2)。次いで、2つの曲率半径、軸の回転・傾きの仮値を、理想面を与える仕様値を基準とした公差の範囲で変化させ、その仮値と実測値との差のPV値が最小となるような仮値をそれぞれ求める(S3〜S6)。そうして最終的に求まった、2つの曲率半径、軸の回転・傾きの仮値を、評価対象のトロイダル面の形状を表す値として出力する(S7)。
(もっと読む)
ガラス基板およびガラス基板の反り検査方法
【課題】塗布材料の塗布厚みや塗布幅のばらつきを可及的に抑制し得る、反りの小さなガラス基板を提供する。
【解決手段】一辺の寸法L1,L2が500mm以上で、且つ板厚L3が4.0mm以下のガラス基板1であって、一方の辺に沿って100mmの等間隔で、且つ他方の辺に沿って500mmの等間隔で複数の小片2に分割すると共に、その分割した100mm×500mmの各小片2の長辺方向両端部を460mmの支持スパンLsで下方から支持した場合に、表面を上側にした状態で両端部を支持した時の自重による第一撓み量δ1と、裏面を上側にした状態で両端部を支持した時の自重による第二撓み量δ2との撓み量差(δ1−δ2)の絶対値が、全ての小片2で0.8mm以下となるようにした。
(もっと読む)
動作コースの判定
アーチファクト(10)と、装置(28)との間の動作コースを判定するためのコンピュータ実施可能な方法。該装置(28)は、少なくとも1つの直線自由度(X、Y、Z)および少なくとも1つの回転の自由度(A1、A2)において、アーチファクトと装置とが互いに関連するように動作可能なアーチファクトと相互作用する。本方法は、アーチファクト(10)を表す幾何データを受け取ることと、装置(28)を表す幾何データを受け取ることと、1つまたは複数の最適化基準に準拠するように、装置およびアーチファクトをどのようにして相互作用経路に沿って互いに対して方向付けすることができるかを、前記幾何データから決定することと、を備える。  (もっと読む)
(もっと読む)
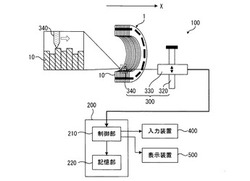
耐火物ライニング残存厚さ判定方法および装置
【課題】容易に実施が可能であり、従来以上に確実にトピードカー内部の耐火物ライニングの残存厚さを判定できる耐火物ライニング残存厚さ判定方法および装置を提供すること。
【解決手段】トピードカー内部の耐火物ライニングの残存厚さを判定する耐火物ライニング残存厚さ判定方法であって、トピードカー内の溶銑排出タイミングの前後(排出前t1(分)、排出後t2(分))でそれぞれ測定したトピードカー外壁温度(T1(℃)、T2(℃))に基いて、前記耐火物ライニングの残存厚さを判定する。
(もっと読む)
シャフトの過負荷を回避する方法
本発明は、例えば混練器のシャフトであるシャフトの曲げを監視することによって過負荷を回避する方法に関しており、ここでこのシャフトは少なくとも片側が支承されている。第1のステップでは、支承部とは異なる少なくとも1つのシャフト位置において、半径方向所定位置からのシャフトの偏差を測定する。別の1ステップでは、場合によっては上記の測定した半径方向所定位置からの偏差から比較量を求める。第3のステップでは、第1のステップで測定した半径方向所定位置からの偏差または第2のステップで形成した比較量と、あらかじめ定めた境界値とを比較する。 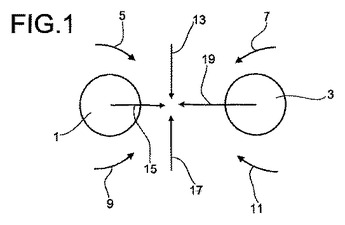 (もっと読む)
(もっと読む)
真円度測定装置、真円度測定方法、及び真円度測定プログラム
【課題】偏心位置が回転軸から大きく離れている場合であっても、高精度で偏心位置が求められる真円度測定装置、真円度測定方法、及び真円度測定プログラムを提供する。
【解決手段】真円度測定装置は、回転駆動手段によるワーク4の回転角、及びその回転角に対応する回転軸からワーク4の表面までの距離を測定値Pとして取得する測定値取得部を備える。また、真円度測定装置は、中心位置(a,b)を変動可能なパラメータとする円形状の補正円CLを設定し、測定値Pから補正円CLの中心位置に向かう方向の、各測定値Pと補正円CLとの間の距離の2乗和が、最小値となるように、補正円CLの中心位置及び半径値を計算し、その計算した補正円CLの中心位置(a,b)を偏心位置とする偏心計算部を備える。
(もっと読む)
タービンロータの軸曲がり算出システム
【課題】タービンロータの軸曲りを算出するシステムを提供を提供する。
【解決手段】ロータディスクの計測点を設定する入力部と、タービンロータの周方向の外表面に沿う4点以上の計測点について、変位計による計測値に基づく径方向の変位量を導出する振れ量検出部と、径方向の変位量及び前記計測点の計測角度を記憶する記憶部と、最確円芯ずれデータを演算する演算部を備え、演算部は全ての計測点から径方向の変位量及び計測角度から任意の3点を選択して計算円値を算出し、計算円値と径方向の変位量との差を誤差量として算出して誤差量合計値を導出し、誤差量合計値の中から最小となる計算円を最確円に選定し、最確円の中心とタービンロータの回転中心とのずれを最確円芯ずれデータとして算出する芯ずれ演算手段と、最大芯ずれ量が基準値内か否かを判定する芯ずれ判定手段と、最確円芯ずれデータから軸曲がり分布を算出する軸曲がり分布算出手段から構成する。
(もっと読む)
玉軸受のボール位相検出方法
【課題】安価なセンサと信号処理によって、正確にボールの位相を検出することができる玉軸受のボール位相検出方法を提供する。
【解決手段】玉軸受1のボール位相検出方法は、センサ13が軸受1の軸方向側方で対向するようにセンサ13及び軸受1を設置する工程と、軸受1を回転させながら、軸受1内に挿入されたボール4又は保持器5とセンサ13との距離に応じた信号を検出する工程と、検出された信号を、軸受1の回転角度情報と共に、制御装置14に出力する工程と、制御装置14にて、検出された信号から最小二乗法を用いて2次関数を求め、ボール4の頂点位置を判断する工程と、を備える。
(もっと読む)
XYステージ
【課題】 バーミラーが大きく撓んでいる場合には、それを検出して、異常として操作者に通知することで、異常時の早期発見と異常個所(バーミラー)の特定を実現する。
【解決手段】 プラテン上をX軸方向及びY軸方向に位置制御されるスライダと、前記スライダ又は前記プラテンの一辺近傍に配置されたバーミラーと、このバーミラーに光を当てて距離を計測するレーザ干渉計と、前記スライダの原点を検出する原点センサとを具備するXYステージにおいて、
前記スライダを前記一辺と平行をなす方向に移動制御したときの、前記原点センサの距離測定値の変化量を検出する変化検出手段と、
前記変化量が所定の閾値を超えたときに警報を発生する警報手段と、
を備える。
(もっと読む)
背面形状分類判定方法及び背面形状分類判定装置
【課題】判定対象の背面形状に対して所定の分類中最も的確な分類を客観的に判定することができる背面形状判定分類方法及びそれを用いて自動的に判定を行う背面形状分類判定装置を提供することにある。
【解決手段】背面形状分類判定装置1は、人体背面の凹凸を関数化した背面形状データを複数のクラスタに分けて記憶した背面形状データベースを構成する記憶部11と、判定対象の背面形状を測定して当該判定対象の背面の凹凸を関数化した背面形状データを取得する背面形状取得手段と、前記判定対象の背面形状データと前記複数のクラスタに含まれる背面形状データとの間の距離に基づいて前記判定対象の背面形状が属するクラスタを決定する判定手段としての機能を備えた演算処理部11と、分離判定に基づいてレポートを表示する表示部12とを備えている。
(もっと読む)
外周長測定装置および断面積測定装置
【課題】高い精度で手軽に物体の外周長または断面積を測定する装置を提供する。
【解決手段】外周長測定装置10は、被測定物18が内側に配置される枠体12と、枠体12に取り付けられ、複数の既知の位置と被測定物18の外周上の複数の被測定点との距離を非接触式で測定する光学式距離センサ14とを有する。外周長測定装置10の中央演算処理装置は、既知の位置および光学式距離センサ14で測定された距離に基づいて被測定点の各々の座標を算出し、被測定点の各々の座標に基づいて被測定点同士の距離を判定し、被測定点同士の距離を合計する。
(もっと読む)
21 - 40 / 65
[ Back to top ]