
Fターム[2F076BE04]の内容
指示記録装置の試験較正と測定試験一般 (4,775) | 測定・試験・監視に共通な手段 (2,016) | デジタル的手段 (725) | 記憶回路・ROM・RAMの利用 (242)
Fターム[2F076BE04]に分類される特許
161 - 180 / 242
構造物の状態検出装置とその状態検出システム及び埋設物
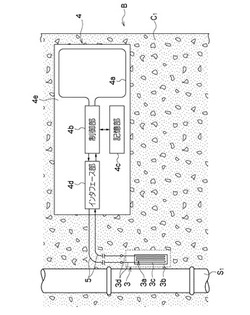
【課題】安価で簡単に構造物の状態を検出することができるとともにこの検出結果を確実に送信することができる構造物の状態検出装置とその状態検出システム及び埋設物を提供する。
【解決手段】検出装置3は、構造物Bの状態を埋設状態で検出する装置であり、構造物Bの鉄筋S1の状態を検出する。検出装置3は、構造物Bの歪みに応じて電気抵抗が変化する歪みゲージ3aを備えている。無線タグ4は、検出装置3の検出結果を埋設状態で送信する装置であり、電源となる電池などを備えておらず、リーダライタ装置側から供給される電力を電源として動作する。無線タグ4は、コンクリートC1の表面から鉄筋S1の表面までのかぶりコンクリート内に埋め込まれている。制御部4bは、歪みゲージ3aの抵抗値を測定してこの測定結果をアンテナ部4aからリーダライタ装置に送信する。
(もっと読む)
事物決定装置、事物決定方法、プログラムおよび記録媒体

【課題】センサノードが装着された物体及び物体の状態を推定する。
【解決手段】事物決定装置1は、センサノード2から受信したセンサデータから変化が起こっている区間を抽出するデータ変化抽出手段11と、抽出した変化から、物体の事象であるイベントを特定するイベント特定手段12と、複数のイベントの中から略同時に起こっているイベント同士をグループ化してイベント集合を求め、イベント集合を時系列順に並べることでイベント集合系列を求めるイベント集合特定手段13と、物体の状態と物体に起こり得る状態間遷移の関係を物体毎に記述した複数の状態遷移図を予め記憶する記憶手段15と、状態遷移図毎にイベント集合系列が得られる尤もらしさを求めることにより、センサノード2が装着された物体と物体の状態を同定する物体同定手段14とを有する。
(もっと読む)
異常監視装置
【課題】競合学習型ニューラルネットワークの規模を大きくせずに複数種類の対象信号を用いて機器の異常の予兆を早期に検出可能とする。
【解決手段】信号入力部2は、機器Xの動作により生じる複数種類の対象信号を取り込む。各対象信号の特徴を表す特徴ベクトルを特徴抽出部4でそれぞれ抽出する。カテゴリ分類部1は、特徴抽出部4により抽出した各特徴ベクトルを入力データとする競合学習型ニューラルネットワークを用いて構成される。乖離度演算部5は、カテゴリ分類部1における出力層のニューロンに設定された重みベクトルと機器Xの動作により得られた各特徴ベクトルとの差分ベクトルの大きさを乖離度として求める。判別部6は、各対象信号から得られた乖離度を要素とする多次元の乖離度ベクトルの存在領域により機器Xの異常の有無を判別する。
(もっと読む)
異常監視装置
【課題】異常の前兆の検出を可能にし、かつ対象信号の一時的な乱れを検査対象の異常と誤判断するのを防止可能にする。
【解決手段】信号入力部2は、機器Xの動作により生じる対象信号を取り込む。対象信号の特徴を表す特徴ベクトルを特徴抽出部3で抽出する。カテゴリ分類部1は、特徴抽出部3により抽出した特徴ベクトルを入力データとする競合学習型ニューラルネットワークを用いて構成される。乖離度演算部4は、カテゴリ分類部1における出力層のニューロンに設定された重みベクトルと機器Xの動作により得られた特徴ベクトルとの差分ベクトルの大きさを乖離度として求める。乖離度演算部4で求めた乖離度の履歴が履歴記録部5に記録され、判別部6は、乖離度の履歴において変化率が規定値以上かつ継続時間に達すると機器Xの動作状態に異常の前兆があると判定する。
(もっと読む)
水中投下型センサシステム
【課題】使用後にセンサ等を海洋に放棄しても海洋環境汚染のおそれのない水中投下型センサシステムを提供する。
【解決手段】コンピュータ部1と水中に投下して落下中のセンサ5とを防水・防塩通信ケーブル3と水中通信ケーブル6とで結び、センサ5が計測する水深、水圧等の情報を計測し、計測終了後は、防水・防塩通信ケーブル3と水中通信ケーブル6とを切り離して、水中通信ケーブル6、センサ5等を海洋中に投棄する。投棄される水中通信ケーブル6、センサ5等は、水中で生分解して消滅する生分解性材料と水中で溶け出しても有害物質とならない金属とからなっており、海洋環境汚染を起こすことはない。
(もっと読む)
異常監視装置
【課題】規定の順序で動作が変化する機器について正常・異常の判定が可能な異常監視装置を提供する。
【解決手段】機器Xは規定順序で複数種類の動作を行う。機器Xの動作により生じる対象信号を信号入力部2が取り込み、特徴抽出部3が抽出した対象信号の特徴量を競合学習型ニューラルネットワーク1に入力する。競合学習型ニューラルネットワーク1の動作状態はクラスタリングマップ5における発火位置に反映される。機器Xの一連の動作に応じたクラスタリングマップ5の発火位置の変化パターンを動作パターンとし、動作パターン記憶部6が記憶した機器Xの正常時の動作パターンと、機器Xの実際の動作時における動作パターンとの類似度を判定部7において評価する。判定部7での評価により、機器Xの各動作における異常だけではなく、機器Xの動作順序の異常も検出可能になる。
(もっと読む)
ダムの外部変形評価方法
【課題】地震発生の後、短時間でダムの外部変形度合いを高精度に評価できるようにした、ダムの外部変形評価方法を作成することが課題である。
【解決手段】ダムに設置された複数のGPS受信装置を用いてリアルタイムに外部変形度合いを計測し、得られた時系列計測データからCPUによりダムの変位データを算出して記憶手段に記憶すると共に、該変位データにフィルタ処理・平滑処理を行なった処理済み変位データを算出して記憶手段に記憶するようにしたダムの外部変形具合の評価方法において、地震発生信号により地震前に算出したダムの変位データにおける標準偏差σと地震後におけるダムの変位データの平均値xとを算出し、該平均値xと地震前の標準偏差σとを用い、前記CPUでZ推定により変位を算出するようにした。
(もっと読む)
観測装置、土地地盤変位監視システムおよびアンテナ装置
【課題】人や車両の通行を妨げたり、景観を損ねたりすることのない、観測装置および当該観測装置を用いた土地地盤変位監視システムを提供する。
【解決手段】土地地盤変位監視システム1は、高速道路15の路側帯16上の各測定点に埋め込まれた測定点観測装置10と、位置が既知である基準点に設置された基準点観測装置11と、監視装置12とから構成される。測定点観測装置10は舗装部19に固定されている。測定点観測装置10と基準点観測装置11とは、GPS衛星21からの電波を受信し、電波の搬送波の位相に関するデータ等を求める。監視装置12は、測定点観測装置10と基準点観測装置11とから受信した位相に関するデータ等から基準点に対する測定点の相対位置を求め、さらに相対位置の変化から測定点の土地地盤変位を検知する。
(もっと読む)
物品内の可撓性基材を通る導通
物品が、第1の導電性回路パスと、第2の導電性回路パスとを含む。第1の所定の孔位置において、第1の回路パスの部分が第2の回路パスの部分に近接して配置される。第1の所定の孔位置において、第1の電気絶縁障壁層が、第1の回路パスと第2の回路パスとの間に挿置され、孔を導電性充填材で充填することによって、第1の孔位置において第1の回路パスが第2の回路パスに導電接続される。導電性充填材は、第1の所定の孔位置において第1の回路パスが第2の回路パスに導電接続され、該第1の回路パスと該第2の回路パスとの間に相互接続用導電性充填材パスを形成するように構成される。 (もっと読む)
異常監視装置
【課題】検査対象物の状態をより高い精度で判定する。
【解決手段】周波数成分抽出部2が、信号入力部1によって検出された状態に基づく検査信号から周波数成分を要素とする特徴量を抽出して検査データを作成する。クラスタ判定部42が、マップ作成部41によって教師なし競合学習型ニューラルネットワーク40を用いて作成されたクラスタリングマップ上の出力層ニューロンごとに、検査データと重み係数データとのユークリッド距離を算出して最小値を抽出する。上記最小値が最小値ニューロンの閾値以下であれば特徴量データが正常カテゴリに属すると判定する。同時に、データ判定部71が、基準範囲設定部70で設定された基準範囲と特徴量データの各要素との比較を行う。制御部8が、特徴量データが正常カテゴリに属するとの判定を受けた場合や、特徴量データの各要素が基準範囲内にあるとの判定を受けた場合、検査対象物が正常状態であると判定する。
(もっと読む)
河床洗掘モニタリング方法
【課題】水深の深い大規模河川であっても比較的容易に計測機器を設置でき、必要な精度で経時的に河床洗掘状況をモニタリングできるようにする。
【解決手段】データロガー機能を備えた水圧計22を重錘機能を有する保護容器24に内蔵した構造の河床部水位計12を、河床部10上に設置して、河床洗掘量を含む相対的な水位を経時的に計測しデータを蓄積すると共に、固定点に水面計測水位計14を設置して絶対的な水位を計測し、前記河床部水位計による水位計測値と前記水面計測水位計による水位計測値を読み出し、それらを同期させて両者の差を順次求めることにより、河床変形の進行状況をモニタリングする。
(もっと読む)
複数の観測結果の間の差異を検出するシステムおよびその方法
【課題】観測対象に生じた異常を精度良く検出する。
【解決手段】複数の観測結果の間の差異を検出するシステムを提供する。このシステムは、ある観測対象を時間の経過に応じて観測した複数の観測値を含む第1時系列データと、観測対象を時間の経過に応じ観測した複数の観測値を含む第2時系列データとを取得する取得部と、第1時系列データから複数の観測値を反復復元抽出して当該第1時系列データの複製である第1複製データを生成する複製部と、第1複製データの累積確率分布と、第2時系列データの少なくとも一部を含む第2複製データの累積確率分布との間の、同一の観測値における確率値の差分に基づいて、第1時系列データと第2時系列データとの間の相違を示す指標値を算出して出力する算出部とを備える。
(もっと読む)
設備診断方法、設備診断システム及びコンピュータプログラム
【課題】設備ごとに多くのセンサを備える必要がなく、精度の高い設備診断方法及び設備診断システムを提供する。
【解決手段】診断の対象となる設備の状態を示す変数であって、時間と共に変動する時系列データを取得するデータ取得部21と、データ取得部21で取得した時系列データから、前記設備における前記時系列データが決定論的であるか確率論的であるかの指標となる決定論性を表す値を算出する並進誤差演算部24と、並進誤差演算部24で算出された決定論性を表す値が、所定のしきい値を超えて変化した場合に、前記設備が警告すべき状態であると判定する故障判定部26と、を備える。決定論性を表す値は、並進誤差又は順列エントロピーである。決定論性を表す値として順列エントロピーを用いる場合は、順列エントロピー演算部を備える。
(もっと読む)
計測装置管理システム
【課題】複数の計測装置で冗長化して計測する場合でも個々の計測装置の異常を早期に発見することができる計測装置管理システムを提供する。
【解決手段】計測装置管理システム1は、計測対象105a〜105cのうちで同一の計測対象を計測装置104a〜104cで多重に測定し、管理装置102では計測装置診断基準情報202に基づいてその測定データの夫々が正常領域にあるか否かを計測装置診断手段310で診断し、いずれかの計測データが正常領域にない場合に、その正常領域にない計測データに係る計測装置が異常であることを示す情報を出力する。
(もっと読む)
異常判定方法および異常判定装置
【課題】正常時のデータを収集するだけで運用が可能であり、しかも運用後に発生する異常時のデータを利用して判定精度を高めることを可能とする。
【解決手段】監視対象物が発する音をマイクロホン2aで電気信号に変換し、特徴量抽出部3においてこの電気信号の特徴量を抽出し、競合学習型ニューラルネットワーク1により特徴量を分類する。初期段階では、監視対象物が正常であるときの特徴量を学習データに用いて競合学習型ニューラルネットワーク1の学習を行う。判定モードでは、監視対象物が正常以外の場合に、そのときの電気信号を原データ記憶部5に保存する。原データ記憶部5に適数個の電気信号が保存されると、各電気信号の特徴量に対して監視対象物の状態に応じたカテゴリを付与した学習データを生成し、当該学習データにより競合学習型ニューラルネットワーク1の追加学習を行う。
(もっと読む)
検出センサ、そのセンサヘッド及びコントロールユニット
【課題】センサヘッドに対応する単位情報を表示可能な検出センサ、そのセンサヘッド及びコントロールユニットを提供する。
【解決手段】複数種類のセンサヘッド12から選択された一センサヘッド12がコントロールユニット11に接続され、このコントロールユニット11の電源が投入されると、センサヘッド12から電気信号S1及び識別信号S2が出力される。CPU24は、受けた識別信号S2に対応する換算式及び単位情報をメモリ23から選択し、この選択した換算式を用いて上記電圧信号S1レベルを換算処理し、その換算した数値(検出値)を第一表示部25に表示させる。
(もっと読む)
センサ装置、センサシステム及び異種物理量を検出可能なセンサ装置の接続方法
【課題】単機能センサ同士を接続、通信可能としてセンサのみで異種計測値に基づく演算、制御が可能なセンサシステムを構築する。
【解決手段】第1の物理量を検出するための検出手段と、検出手段で検出された検出量に基づいて所定の処理を行う演算手段と、検出手段で検出された物理量と異なる第2の物理量を検出可能な他のセンサ装置と電気的に接続可能で、該他のセンサ装置とデータ通信を行うための通信インターフェース3と、通信インターフェース3に接続されている他のセンサ装置の有無、及び通信インターフェース3を介して、接続される他のセンサ装置が検出する第2の物理量の種別を判定可能な種別判定手段とを備えており、演算手段は、検出手段で検出された第1の物理量に関する検出量と、他のセンサ装置で検出された第2の物理量に関する検出量とに基づいて演算可能としている。
(もっと読む)
海洋観測システム、自己浮上型海洋観測装置および発射装置
【課題】安価な簡便な方法で、特定地点の海洋現象の鉛直構造を長期間に亘って観測した結果をリアルタイムに取得可能な海洋観測システムを提供する。
【解決手段】自己浮上する浮力体部4を備えて浮上しながら海洋現象を観測する自己浮上型海洋観測装置2を1ないし複数装填して、自重により海底に着底した発射装置1から、あらかじめ定めたスケジュールに応じて、各自己浮上型海洋観測装置2を切離すことにより、海中を鉛直方向に自己浮上しながら、それぞれで海洋現象をセンサ部6により観測して電子回路部5のメモリに一時蓄積し、海面に達した際に、メモリに蓄積した観測データを空中線部3により無線で送信する。観測データは、深度、水温、塩分のうち少なくとも1ないし複数を含む。深度または水温のあらかじめ定めた時間ごとの平均値があらかじめ定めた回数の間変化しないことを検出した場合、自己浮上型海洋観測装置2が海面に浮上したものと判断する。
(もっと読む)
検出器の作動方法、および検出器と通信する制御装置
検出器(1)は検出装置(4)によって少なくとも1つのアナログ信号(A)を検出し、評価装置(5)によって少なくとも1つのアナログ信号(A)を使用して少なくとも1つのデジタル信号(D)を作成し、少なくとも1つのデジタル信号(D)は検出器外部の制御装置(2)へ送られる。検出器(1)の監視装置(6)にアナログ信号(A)またはアナログ信号(A)およびデジタル信号(D)が供給される。監視装置(6)は、監視しているの装置(4,5)が適正に機能している場合にのみイネーブル信号(F)を制御部(2)へ送る。通常モードにおいて制御装置(2)は、イネーブル信号(F)も送られてきている場合にのみ、デジタル信号(D)をさらに処理する。さもなければ、制御装置は送られたデジタル信号(D)にエラーが含まれていると評価し、検出器(1)の誤機能に関するメッセージを出力する。制御装置(2)はときおり検査信号(P)を検出器(1)に送って通常モードから検査モードへ切り換わる。検出器(1)は検査信号(P)の伝送に基づいて検査モードに入り、検査モードにおいて監視装置(6)に供給された信号(A,D)を操作して、監視装置(6)が適正に機能している場合には監視装置(6)に、監視している装置(4,5)の適正でない機能を識別させる。制御装置(2)は検査モードにおいて、イネーブル信号(F)が制御装置にそれぞれ加えられて送られる場合、検出器(1)の誤機能に関するメッセージを出力する。  (もっと読む)
(もっと読む)
倒壊危険度評価システム
【課題】個々の建物に設置した加速度検知装置が検知した最大加速度データから当該建物の倒壊危険度を的確に評価することができ、しかも地震後において加速度検知装置が検知した最大加速度データを取得するのも容易に行える倒壊危険度評価システムを提供することにある。
【解決手段】携帯端末装置2は、建物に設置している加速度検知装置1のICタグチップ15から読み取り器20により受信した最大加速度データと、記憶装置24に記憶されている地図データから特定される当該加速度検知装置1の設置場所及び当該建物に関する構造データとを参照して剛性演算を行い、この演算結果から当該建物3の倒壊危険度の区分を特定し、この特定区分を提示する処理を行う。
(もっと読む)
161 - 180 / 242
[ Back to top ]