
Fターム[2F103EB11]の内容
Fターム[2F103EB11]の下位に属するFターム
フォトダイオード、フォトトランジスタ (257)
PSD (7)
CCD (75)
平面状 (121)
複数の受光部 (498)
Fターム[2F103EB11]に分類される特許
1 - 18 / 18
干渉法の原理を用いたたわみ測定機器
【課題】評価ユニットとたわみボディとの間に生じるノイズの影響を受けにくい、光ファイバー手段を用いた干渉法原理による、たわみ測定機器を提供すること。
【解決手段】第1の光ファイバー手段と第2の光ファイバー手段は、たわみボディにのみ配置されており、第1の光ファイバー手段および/または第2の光ファイバー手段は入力側で、ビーム源を備えた唯一の光供給ファイバーと接続されており、第1の光ファイバー手段および/または第2の光ファイバー手段は出力側で、評価回路を備えた唯一の光評価ファイバーと接続されている。
(もっと読む)
光学式エンコーダ

【課題】受光素子が十分な光量を得ることができる小型光学式エンコーダを提供すること。
【解決手段】光学式エンコーダ1はスケールトラック2’を有するスケール2と、スケールトラック2’に光を出射する光源31と、光源31からスケールトラック2’に出射される光を透過するスケール側レンズ32と、スケール側レンズ32を介してスケールトラック2’によって反射された光を受光する受光素子33とを有する読取ヘッド3とを有する。光源31は、スケール側レンズ32と受光素子33との間に配設される。光源31の光軸Lsrcは、スケール2の読取方向においてスケール側レンズ32の光軸と一致し、スケール2の読取方向に直交する方向において、スケール側レンズ32の光軸Lsから所定距離Dだけ離隔されている。
(もっと読む)
複数の波長特定デバイスのインタロゲーション
複数の波長特定デバイスをインタロゲートするための装置は、低コヒーレンス時間的インターフェログラムを提供する干渉計を照射するための広帯域光源を有する。例えば互いに直列に接続された複数のファイバブラッググレーティングなどの、複数の波長特定デバイスの少なくとも1つのアレイはインターフェログラムを受信し、その結果、各デバイスは、広帯域光源の帯域幅と比較して制限された範囲の波長帯域幅と相互作用できる。それら自身の特徴波長において広帯域光源とそれぞれが相互作用した複数のデバイスのアレイの出力を有する干渉計を照射する代わりに、従って、広帯域光源からの出力を変調して低コヒーレンスインターフェログラムを生成するために、干渉計が使用される。次に、複数のデバイスのアレイは、この低コヒーレンスインターフェログラムから、より高いコヒーレンスインターフェログラムを抽出し、もしくはフィルタリングする。 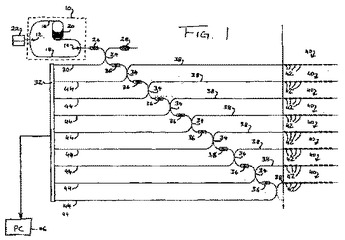 (もっと読む)
(もっと読む)
位相ベース検知
ファイバから後方散乱された信号の微分値または変化率が測定される、分散型音響検知(DAS)の方法である。信号が測定される2つの時間の差が、信号が測定されている期間よりもはるかに短い場合に、このようにして測定された位相の変化、または微分値は信号自体よりもはるかに小さい振幅を有し、結果的に感度が低下する。周波数偏移は、たとえば異なる周波数偏移によって各アームの信号を変調させるために配置された出力干渉計を採用することによって、変化率を比較するために時間的にずらされた帰還信号に適用されることが可能である。 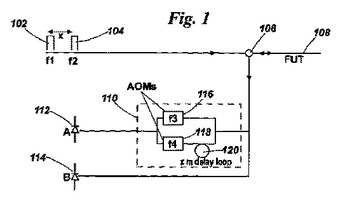 (もっと読む)
(もっと読む)
位置測定装置
【課題】送信器と受信器を、それらに対応する偏向部品に対して具体的に配置する際の柔軟性を出来る限り大きくすることができる位置測定装置を提供する。
【解決手段】送信器1と受信器5を目盛支持体3の同じ(例えば、第一の)表面の前の同じ空間領域内に配置するとともに、送信器及び受信器と逆側の目盛支持体の(第二の)表面32の別の(第二の)空間領域内R2に、送信器から送出された電磁波を受信器の方に方向転換させる役割を果たす(一つ又は複数の部分から成る)偏向部品4を配備する位置測定装置において、送信器1には、送信器1から送出された電磁波を平行な電磁波ビームL1にする、送信器1から送出された電磁波Lをコリメートする機器2が対置している。
(もっと読む)
軸受スライド機構を有するエンコーダ
【課題】本発明は、符号板を有する中空軸と軸受を一体化した軸受ユニットを基台に対して軸方向移動可能とし、受光素子と符号板との間の隙間を調整可能とすることを目的とする。
【解決手段】本発明による軸受スライド機構を有するエンコーダは、基台(1)に対し、符号板(5)と中空軸(4)と軸受(2)からなる軸受ユニット(20)を軸方向移動可能に設け、プリント基板(7)に設けた受光素子(28)と符号板(5)との間の隙間(G)を調整可能とする構成である。
(もっと読む)
回転角度検出装置及びロボットのアーム回動機構及びロボット
【課題】ロボットに備えられたアームの絶対角度をより容易かつ高精度に検出することの
できる回転角度検出装置、及び該回転角度検出装置を備えるロボットのアーム回動機構、
及び該アーム回動機構を採用したロボットを提供する。
【解決手段】基台11の上面11Aには基台11内のモータにより回動される回転軸AX
1に固定される回転体としての連結軸12が設けられている。基台11の上面11Aには
反射型光センサ21を配設し、連結軸12の下面12Aには中心が軸心C1に一致する有
底円筒形状の反射体20を固定する。反射体20の円筒側壁20Bの下面には、その底部
20Aに対して傾斜を有する反射面20sが形成されている。反射型光センサ21から発
せられる光L1の反射面20sによる反射光L2の光量が、反射面20sと反射型光セン
サ21との対向距離Dにより変化することを利用して、基台11に対する連結軸12の回
転角度を絶対角度として得る。
(もっと読む)
エンコーダ
【課題】受光素子が発生する信号のうちエンコーダ信号に寄与しない直流成分が比較的大きいエンコーダにおいても、低電圧で利用したい場合や、所望の変位検出精度を実現したい場合の両者に対応することができるようにすること。
【解決手段】所定周期のパターンが形成されたエンコーダスケール1とエンコーダヘッド2との相対変移を検出するエンコーダにおいて、上記エンコーダヘッド2は、上記エンコーダの出力が1相以上の周期性を有するエンコーダ信号であるときに、上記エンコーダ信号の振幅中心に設定する基準電圧を発生する基準電圧発生回路24と、上記基準電圧発生回路24で発生した基準電圧を変更する基準電圧可変手段25と、を備える。
(もっと読む)
測長装置
【課題】
本発明の根底をなす課題は、高い測定精度を備えた測長装置を提供することにある。
【解決手段】
電気構成部品(13)で発生した熱を帯行体(14)に伝達するように、
かつ測定方向Xに対して少なくとも横方向での、帯行体(14)と走査ユニット(10)の間の相対運動を許容するように設計されている熱伝導部材19を備えていることにより解決される。
(もっと読む)
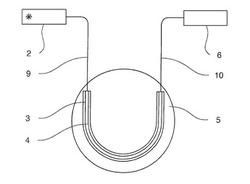
干渉型光ファイバセンサシステムおよびセンシング方法
【課題】雑音を抑制した干渉型光ファイバセンサシステムを提供。
【解決手段】物理量を検知するセンシングファイバ14aおよびリファレンスファイバ14bを有する干渉計と、干渉計からの干渉光から物理量に対応する測定信号を検出するPGC復調器59とを含む干渉型光ファイバセンサシステムにおいて、干渉光に含まれる雑音信号を低減するための雑音低減信号46aを干渉計に印加する雑音シフト信号発生器46を含み、PGC復調器59は、雑音低減信号46aにより雑音が低減された測定信号を出力する。
(もっと読む)
球体の絶対角度検出システム、球体アクチュエータおよびポインティングデバイス
【課題】 球体の絶対角度検出を容易に行える角度検出システムを提供すること。
【解決手段】 球体の絶対角度検出システム1は、球体2の絶対角度検出のための、面状の画像認識用パターンPが設けられた球体2と、球体2の外部に設けられた画像認識装置3とから構成される。画像認識用パターンPは、QRコード(登録商標)などを要素パターンp1等として球体2の表面上に複数配置して構成することができる。画像認識装置3は、画像入力部4と入力画像処理部5からなり、得られた画像情報から球体2の絶対角度情報が出力される。
(もっと読む)
エンコーダ
【課題】エンコーダの小型化及び低コスト化を図る。
【解決手段】第1インデックススケール20で生成された+1次回折光及び−1次回折光を、相互に逆位相の変調信号V(t)、及び変調信号V’(t)に基づいて、それぞれの光路上に配置された電気光学素子16A,16Bによって周期的に偏向する。そして、受光素子26へ干渉光が入射することによって得られる光電変換信号I(t)に基づいて移動体の位置情報を検出する。これにより、+1次回折光と−1次回折光とを、機械的に変調するスキャン機構を用いることなく変調することが可能となるため、装置の小型化を図ることが可能となる。また、電気光学素子16A,16Bそれぞれは単体で回折光を偏向することが可能であるため、スキャン機構の構造を単純化することができ、装置の低コスト化を図ることが可能となる。
(もっと読む)
角度検出装置
【課題】光センサを用いた角度検出装置において、角度検出対象の角度変化をリニアに検出することができるとともに、その検出精度の向上を図ることができる角度検出装置を提供する。
【解決手段】角度検出装置1は、対向配置された投光部12a及び受光部12bからなる光センサ12を備えている。投光部12aと受光部12bとの間には、角度検出対象の角度変化に従動して投光部12aと該受光部12bとを結ぶ中心線を開口中心として開度が徐変する可変開口部を有する遮光板8a,8bが介在されている。そして、角度検出部13は、受光部12bによる投光部12aからの光の受光量に基づいて、角度検出対象の変化角度を求める。
(もっと読む)
エンコーダおよび撮影装置
【課題】回転量の誤検知が起こりにくいエンコーダと、このようなエンコーダを有する小型化に適した撮影装置を提供する。
【解決手段】複数の羽根を有し、回転体の回転に伴って回転する羽根車と、上記羽根車の回転により上記羽根で断続される光路を形成するフォトインタラプタとを備え、該フォトインタラプタで該光路の断続を検出することにより上記回転体の回転量を検出するエンコーダにおいて、上記羽根は、上記羽根車の回転中心から放射状に延びる線よりも周回方向に斜めに傾いて広がっている。
(もっと読む)
ロータリエンコーダ装置、回転体駆動制御装置、画像形成装置、及びロータリエンコーダホイール
【課題】回転体の駆動計測または計測に基づいた駆動制御を行い、かつ、ロータリエンコーダの取り付け偏心も検出または補正制御可能とするロータリエンコーダ装置を提供する。
【解決手段】先ず(150)では、ロータリエンコーダからのアナログ出力を(151)でA/D変換し、(152)でP1、P2、P3・・・P72等のパターンごとに出力される(153)回転パルス信号成分抽出と、(154)偏心信号成分抽出を行っており、具体的には、偏心による『当該ロータリエンコーダにおいて、回転角度に対するHとLレベルパルス幅の比率に応じて回転軸芯に対するロータリエンコーダの取り付け偏心量と、偏心位相を検出する偏心量位相検出手段』のロータリエンコーダ1周分(P1、P2、P3・・・P72)のパターンから得られるH/(H+L)のSin関数の周期変動の振幅と位相を求め、その変動成分を分離(フィルタリング)する事により求められる。
(もっと読む)
情報媒体
【課題】発光ダイオードのような通常の光源を用いることができる情報媒体を得ること。
【解決手段】トラックに識別マーク(20)が設けられ、この識別マークは、光源から放射される中心波長(λ)の光、すなわち角度(Θi)で情報媒体(10)に入射する当該光によって検出することができ、これらの識別マークから情報媒体(10)のポジションを導き出すことができる。この際、前記識別マーク(20)が、格子周期が(Λ)である少なくとも第1のパターン(22)でパターン化された領域(25)によって形成されており、これらの領域は、金属膜(40)の下面(40b)および/または金属膜(40)の表面(40a)に配置されている。この際、第1のパターン(22)の格子周期(Λ)が、数式Λ=λ/(nP★−sin(Θi))、またはΛ=λ/(nP★+sin(Θi))を満足する。
(もっと読む)
エンコーダ、回転速度検出装置、移動速度検出装置、回転角検出装置、移動位置検出装置、回転方向検出装置、移動方向検出装置、ジョグダイヤル、及びスイッチ
【課題】 小型で低消費電力のエンコーダを提供する。
【解決手段】 コードディスク4は低輻射率領域2と高輻射率領域3とを円周方向に交互に配置してコードを形成してある。このコードディスクが回転しているときは、低輻射率領域2と高輻射率領域3からの赤外線輻射が赤外線センサ1a、1bにより非接触で検出される。波形整形部170において、赤外線センサ1a、1bからの電気信号は増幅回路9a、9bにより増幅され、信号レベル正規化回路12a、12bにより正規化され、デジタル出力信号11a、11bが生成される。
(もっと読む)
反射型エンコーダおよびこの反射型エンコーダを用いた電子機器
【課題】遮光体により不要信号を除去することによって光学特性を向上することができる反射型エンコーダを提供し、さらに、そのような反射型エンコーダを組み込むことにより、より小型で精度の高い電子機器を提供する。
【解決手段】発光素子106および発光素子106を覆い保護する発光側透光性樹脂体101を備えた発光部と、光検出素子103および光検出素子103を覆い保護する受光側透光性樹脂体102を備えた光検出部と、発光側透光性樹脂体101および受光側透光性樹脂体102の間に設けられた、発光部と光検出部とを互いに分離する遮光体107aとを備えている。
(もっと読む)
1 - 18 / 18
[ Back to top ]