
Fターム[2F112DA15]の内容
Fターム[2F112DA15]に分類される特許
141 - 160 / 273
3次元形状測定装置

【課題】距離カウンタPと幅カウンタWのサンプリング周波数のみに依存せずに形状測定装置と測定対象物との表面との間の距離測定の精度を向上させることができる3次元形状測定装置を提供すること。
【解決手段】CCDラインセンサ部による反射光の分布に複数の閾値を設定し、各閾値のそれぞれに基づき距離カウンタ値Pと幅カウンタ値Wを取得する。そして、各距離カウンタ値と前記各幅カウンタ値とを足し上げて、CCD素子の信号の揺らぎによって得られる複数の閾値による各値を利用し実質的にサンプリング周波数を高めた場合と同等の分解能を獲得し、より正確な測定対象物との距離を算出することができる。
(もっと読む)
3次元画像走査装置

【課題】レーザ光の照射位置における戻り光の正確な光量を測定することにより、正確な位置情報及び輝度情報に基づく正確な3次元画像を生成可能な3次元画像走査装置を提供すること。
【解決手段】レーザダイオード2と、第1光学系と、照射位置移動手段と、エンコーダ6aと、第2光学系と、CCDラインセンサ部13と、入射光量測定手段とを有し、検知手段から出力された検知信号により所定時間の間隔を有する複数のタイミング信号が生成され、タイミング信号によってCCDのリセットタイミングが制御し、一のタイミング信号後に確認用レーザ光の光量を入射光量測定手段により測定し、この確認用レーザ光の光量から測定用レーザ光の発光量が決定され、入射光量測定手段からの出力に基づくデータ(一定光量出力の確認用レーザの光量)を陰影情報に利用して3次元画像を生成する。
(もっと読む)
3次元形状測定装置
【課題】CCD本来の感度を得る事と、積分等の歪の無い生波形の後処理ができる事と、その例として測定対象物の角(エッジ)部分においても正確な距離情報を取得することができる3次元形状測定装置を提供すること。
【解決手段】本発明に係る3次元形状測定装置は、マッピングデータの処理を用いることにより、デジタル最高値を中心にして、デジタル最高値を示すCCDから徐々に離れた位置に配設されているCCDのデジタル値がこのデジタル最高値よりも徐々に低い値を示すという分布状態を把握することができ、これにより正確に測定対象物の表面に反射したレーザ光が本来収束すべきCCDを特定する。アナログ回路が減る、部品点数が減る、発熱が減る、消費電力が減る、エコである。
(もっと読む)
監視装置
【課題】測距装置を併設することなく、監視を続けながら測距を行うことの可能な監視装置を提供することを目的とする。
【解決手段】送光部11から射出されたレーザ光が物体に到達し、物体により反射された反射光が到達するタイミングに合わせてシャッタを開閉させる監視制御を行うとともに、該監視制御を行っている期間中に、物体の距離情報を取得するタイミングでシャッタを開閉させる測距制御を行う監視装置を提供する。
(もっと読む)
三次元測距装置
【課題】180度以上の走査角度を確保しながらも、小型で高精度な三次元測距装置を提供する。
【解決手段】水平面に対して傾斜配置された偏向ミラー9を垂直な軸心P1周りに回転する走査機構と、軸心周りに配置され軸心に対して所定角度θ傾斜した光軸L1に沿って測定光を出射する投光部3と、投光部から出射され偏向ミラーで偏向反射された測定光に対する反射光を集光する集光光学系6と、集光された反射光を検出する単一の受光部5と、軸心P1の周方向に沿って互いに異なる位置から異なるタイミングで一つの測定光が出射されるように投光部を駆動する駆動制御部と、走査機構により投光部から測定対象空間に向けて走査された測定光に対する反射光の遅延時間から被測定物までの距離を算出するとともに、走査機構から出射される測定光の走査角度から前記被測定物の角度を算出する距離算出部を備えている。
(もっと読む)
検出装置
【課題】簡素で、外乱を受けにくく、可能な限り長寿命を確保できる構造を採用し、広い角度範囲(最大360度まで)に渡って監視領域の物体を確実に検出できる検出装置を提供する。
【解決手段】監視領域11の物体を位置分解的に検出する検出装置は、送信領域19に電磁波を出射する送信装置15と、受信領域23から反射された電磁波を受信する受信装置21とを備え、前記送信領域19及び受信領域23は前記監視領域11において一定の検出角度をカバーする検出領域27の内部で互いに重畳又は交差し、該検出領域27で出射波17が前記物体により反射され、更に、前記出射波17の伝播経路及び/又は反射波25の伝播経路に設置され、どの時点においても前記検出領域27全体を送信側及び/又は受信側でカバーする結像系29と、前記反射波25をその反射位置に関して識別するための位置分解手段31とを備える。
(もっと読む)
光学式三次元測定および色測定の装置および方法
本発明は光学式三次元測定および色測定のための装置および方法に関し、この装置は、多色共焦点測定方式、三角測量測定方式または他の測定方式による光学式三次元測定のための第1のモードと、色測定のための第2のモードとの間で調整可能であり、第1のモードにおいて広帯域の照明光線が測定対象物表面の第1の平面に集束し、第2のモードにおいて広帯域の照明光線が、測定対象物の表面から一定の間隔dをおいて第1の平面の外部にある第2の平面に集束する。 (もっと読む)
計測器
【課題】測定対象との距離の2次元分布、測定対象の傾斜角、測定対象の傾斜方向を求める。
【解決手段】計測器は、光ファイバ1と、光ファイバ1の入射軸に対して傾いた方向から走査用光を光ファイバの入射側端面に入射させる走査用レーザ3と、光ファイバ1からの光照射によって測定対象10上に現れる照射光形状を撮影するカメラ4と、カメラ4によって撮影された照射光形状の画像から、測定対象10との距離と測定対象10の傾斜角と測定対象10の傾斜方向のうち少なくとも1つを求める演算装置5とを備える。
(もっと読む)
対象物測距装置及びプログラム
【課題】検出した対象物までの距離を精度良く算出することができる対象物測距装置及びプログラムを提供する。
【解決手段】投光パターン検出部22は、画像上の投光パターン34を検出し、歩行者検出部20は、画像上の歩行者を検出し、投光器制御部24は、歩行者32の画像上の位置座標、及び投光パターン34の画像上の投光位置座標を算出し、2点の偏差が所定値以下となるような投光器14の投光角度を算出し、算出した投光角度で投光されるよう投光器14を制御し、2点の偏差が所定値以下となった場合には、撮像装置12と投光器14との距離、投光位置のX座標、及び投光器14の水平方向の投光角度に基づいて、歩行者32までの距離を算出する。
(もっと読む)
物体検出装置及び測距方法
【課題】レーダ受信信号から直接計測することができない遠方に存在する対象物体までの距離を高い精度で演算する物体検出装置を提供する。
【解決手段】
【請求項1】車載のカメラ10の撮像画像の情報に基づいて、測距対象となる対象物体と測距の基準とする基準物体との相対位置関係を算出する物体間相対位置算出部30と、車載のレーダ測距装置20により取得された受信信号に基づいて、測距の基準として選択された基準物体と自車両との間の基準距離を求める基準距離計測部40と、レーダ測距装置20が対象物体までの距離を測距できない場合は、対象物体と基準物体との相対位置関係と自車両から基準物体までの基準距離とに基づいて自車両から対象物体までの距離を演算する距離演算部50とを有する。
(もっと読む)
対物距離計測方法及び装置
本発明に係る方法は、計測対象物(20)までの距離(d)を計測する方法であり、発光器(12)からビーム光(18)を出射するステップと、計測対象物(20)で反射されたビーム光(24)を受光器(14)に入射するステップと、その出射(18)から入射(24)までのビーム光伝搬時間から距離(d)を求めるステップと、ビーム光(18)の出射に際し方形波変調信号(66,74)に従いそのビーム光(18)を振幅変調するステップと、を有する。使用する方形波変調信号(66,74)は、それぞれ複数個の方形パルス(68,68’)からなる複数個の方形パルス群(76,76’)を含む信号(66,74)である特に、本方法では、それら方形パルス群(76,76’)間の時間間隔(PA)を変動させると共に、それらの方形パルス群(76,76’)内の方形パルス(68,68’)の個数を変動させる。 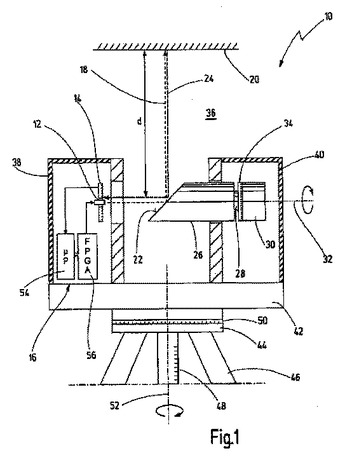 (もっと読む)
(もっと読む)
計測装置および計測方法
【構成】 計測装置10はコンピュータ12を含み、コンピュータ12には複数のレーザーレンジファインダ14が接続される。複数のレーザーレンジファインダ14は、或る環境に配置され、コンピュータ12は、レーザーレンジファインダ14の検出結果に基づいて人を追跡する。たとえば、コンピュータ12は、パーティクルフィルタを用いて、人の位置および移動速度を推定し、胴体および両腕を3つの円で組み合わせた人形状モデルを用いて、人の身体の方向と腕の動きとを推定する。
【効果】 比較的少ない計算量で正確に人を追跡することができる。
(もっと読む)
3次元形状測定器
【課題】レーザ光の照射位置における戻り光の正確な光量による計測が可能な形状測定装置を有する3次元形状測定器を提供すること。
【解決手段】レーザダイオード2と、第1光学系と、照射位置移動手段と、エンコーダ6aと、第2光学系と、CCDラインセンサ部13と、入射光量測定手段とを有し、検知手段から出力された検知信号により所定時間の間隔を有する複数のタイミング信号が生成され、タイミング信号によってCCDのリセットタイミングが制御されており、一のタイミング信号後に確認用レーザ光をレーザダイオード2から照射し、確認用レーザ光の光量を入射光量測定手段により測定し、入射光量測定手段により測定された確認用レーザ光の光量から測定用レーザ光の発光量が決定される。
(もっと読む)
距離測定装置及びプロジェクタ
【課題】 正確な距離測定が可能であって測定可能な距離の範囲が広く、又機構の調整を容易に行える距離測定装置と、該距離測定装置を備えたプロジェクタを提供する。
【解決手段】 プロジェクタは、光源装置と、当該光源装置からの光を表示素子に導光する光源側光学系と、表示素子と、該表示素子から射出された画像をスクリーンに投影する投影側光学系と、距離測定装置1とを備え、光源装置や表示素子を制御するプロジェクタ制御手段を有しているものである。そして、この距離測定装置1は、レーザー光を測距対象に照射するレーザー発光器2と、測距対象からの反射光を集光する受光レンズ4と、この受光レンズ4を透過した測距対象からの反射光を受光する受光素子3と、を有し、レーザー発光器2からの射出レーザー光の光軸位置に受光レンズ4の受光領域を位置させているものである。
(もっと読む)
距離計測装置、距離計測方法および車両
【課題】鏡面反射の有無を判定し、鏡面反射をした位置までの距離を求める。
【解決手段】投光装置1から被検物に計測光PL1,PL2を照射し、被検物によって反射される反射光LB1,LB2を複数の画素を持つ撮像装置2によって受光する。計測光PL1,PL2の投光角度α3,α15の情報と、その反射光を受光する画素の情報とから、その反射光が反射点P3で鏡面反射し、地点P2で散乱反射した多重反射光であるか否かを判定する。鏡面反射を伴う多重反射光であると判定されたときに、鏡面反射した地点P3までの距離d4を求める。
(もっと読む)
白線検出装置
【課題】低負荷かつ高精度に道路面上の白線を検出する白線検出装置を提供することを課題とする。
【解決手段】道路面に描かれた白線を検出する白線検出装置1であって、電磁波を送信し、当該送信した電磁波の反射波を受信する電磁波送受信手段2と、その電磁波の送信及び受信に基づいて検出点までの距離を算出する距離算出手段2と、検出点までの距離に基づいて道路面を推定する道路面推定手段6と、道路面と推定された各検出点に対する電磁波の送信強度と受信強度に基づいて白線を検出する白線検出手段6とを備えることを特徴とし、同一の検出点に対する電磁波の送信強度と受信強度及び距離に基づいて当該検出点での反射率を算出する反射率算出手段6を備え、白線検出手段6は、道路面と推定された各検出点での反射率に基づいて白線を検出すると好適である。
(もっと読む)
車両用光スキャン装置
【課題】適切な大きさの光を照射し、精度の高い検出が可能な車両用光スキャン装置を提供することである。
【解決手段】車両用光スキャン装置に於いて、レーザダイオード55から照射された光が、レンズ34、35、36で案内され、レンズホルダ61及びワイヤバネ108によって第1の方向に振られて走査される。そして、上記レーザダイオード55から照射されるレーザ光260の形状は、上記第1の方向の寸法が変化可能である。
(もっと読む)
ビーム照射装置
【課題】目標領域内におけるスキャン動作を精度よく行い得るビーム照射装置を提供する。
【解決手段】制御処理部202は、ミラーアアクチュエータ100を第1基準位置と第2基準位置の近傍域で2次元的に駆動させ、これら基準位置を検出した時のPSD106の出力値(座標データ)を記憶する。温度変化や経年変化等の影響でPSDの状態が初期状態から変化すると、図8(b)に示す如く、記憶された座標データ(第1基準点R1´、第2基準点R2´)は、初期状態において設定した座標データ(第1基準点R1、第2基準点R2)からずれるようになる。制御処理部202は、これら2つの基準点におけるズレ量ΔP1、ΔP2とズレ量ΔQ1、ΔQ2に基づいて目標値テーブル202aのデータ校正を行い、校正した目標値テーブルを用いてサーボ動作を行う。
(もっと読む)
レーザレーダ装置
【課題】装置の小型化を実現することができるようにする。
【解決手段】レーザ光源18によってレーザ光を照射し、照射されたレーザ光が、2焦点レンズ16の中央部分16Aを透過する。2焦点レンズ16の中央部分16Aを透過したレーザ光は、測定領域内の対象物で反射し、反射光が、2焦点レンズ16の周辺部分16Bによって焦点位置に集光される。そして、焦点位置を含む所定領域内に配置された受光素子22によって、反射光が受光される。
(もっと読む)
改善された光学測距カメラ
【課題】一つの情景中の全ての画素から実質的に同時に深度情報を得る、改善された測距カメラを提供する。
【解決手段】情景中の被写体までの距離を示す画像を生成する装置であって、第1変調関数を有し、放射波を情景に向かわせる変調された放射波源と、検知変調器を含み、第2変調関数を有するとともに、検知アレイを有し、該アレイが複数の検知要素を含んでおり、情景内で複数の平行な間隔を有するセグメントから反射された放射を検知するとともに、上記検知された放射波に応じて、上記情景の領域までの距離に応答する信号を発生させる検知器と、間隔を有する複数のセグメントの少なくともいくつかを含むとともに上記装置から被写体までの距離を示す強度分布を有する画像を形成するプロセッサと、を含み、複数の間隔を有するセグメントの各々が上記装置に関して距離限界を有しており、該距離限界が上記検知変調器により決定され、複数の間隔を有するセグメントの少なくとも一つが少なくとも一つの他の間隔を有するセグメントの限界と異なる距離限界を有している。
(もっと読む)
141 - 160 / 273
[ Back to top ]