
Fターム[2F112DA15]の内容
Fターム[2F112DA15]に分類される特許
121 - 140 / 273
ビーム照射装置およびレーザレーダ
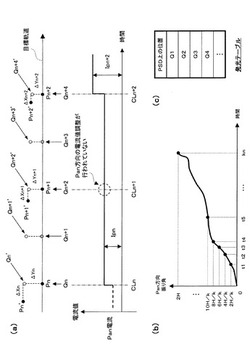
【課題】目標領域に対するレーザ光の照射精度を高く維持しながら、制御回路の処理負担を軽減できるビーム照射装置およびレーザレーダを提供する。
【解決手段】スキャン制御部1aは、Tilt方向におけるミラー制御の半分の頻度で、Pan方向におけるミラー制御を行う。また、スキャン制御部1aは、PSD308上に設定された目標軌道上のQn、Qn+1、…に対応する位置にサーボ用レーザ光の実測位置が到達したことに応じて、レーザ光源401をパルス状に発光させる。これにより、走査用レーザ光は、サーボ用レーザ光の実測位置がQn’、Qn+1’、…に到達したタイミングで、目標領域に照射される。こうすると、Pan方向におけるミラー制御をラフに行いながら、略一定振り角毎に、走査用レーザ光を目標領域に照射できる。
(もっと読む)
光電センサ及び光通過時間原理により距離を測定する方法

【課題】従来システムは、目標が動く動的な状況となると移行条件が満たされないにもかかわらず、その後に測定値の補正又は新しい測定が行われる欠点がある。このような動的な状況でも使用できる光通過時間による距離測定方法を提供する。
【解決手段】光通過時間原理により距離を測定する光電センサ10であって、光信号を発光する発光部12、直反射又は拡散反射された受光信号を受光する受光部16、及び解析ユニット18を備えており、解析ユニットが、観察時点に光信号を発光するための発光遅延時間をシステマチックに選択することにより受光信号のための移行条件を満たし、必要な発光遅延時間から光通過時間を計算するように構成されている。さらに、コントローラが設けられており、観察時点に移行条件を満たしているように発光遅延時間を追跡するように構成されている。
(もっと読む)
距離計測装置及びプログラム
【課題】対象物の3次元位置を精度よく計測することができるようにする。
【解決手段】第1撮像部20及び第2撮像部22によって、撮像対象物を各々異なる位置から撮像して、複数の撮像画像データを出力し、3次元距離算出部24によって、出力された複数の撮像画像データに基づいて、撮像対象物を表わす領域内の各画素に対応する3次元位置までの距離を算出して距離画像を生成する。レーザレーダ14によって、レーザの走査方向に並んだ各2次元位置までの距離を計測する。座標変換部32によって、レーザレーダ14によって距離が計測された2次元位置を、距離画像の画素座標に変換する。補正領域抽出部34によって、変換された画素座標に基づいて、位置距離画像から補正対象領域を抽出し、3次元距離補正部36によって、補正対象領域内の各画素に対応する3次元位置までの距離を、レーザレーダ14によって計測された距離に補正する。
(もっと読む)
レーザ加工機
【課題】被加工対象物の表面を簡便に且つ迅速に加工可能なレーザ加工機を提供する。
【解決手段】ガルバノスキャナで走査したレーザ光を、テレセントリック型fθレンズで被加工対象物に照射して表面を加工する。ガルバノスキャナの上流側からレーザ光の光軸に沿って光を入射し、被加工対象物の表面で反射してレーザ光の光軸に沿って戻ってきた光を受光することによって、表面までの距離を検出する。こうすれば、ガルバノスキャナの上流側から被加工対象物の表面までの間では、レーザ光の光軸と、距離検出用の光軸とが一致するので、常に正確に、レーザ光の照射位置までの距離を検出できる。その結果、面倒な光軸調整が不要となり、加えて、ガルバノスキャナでレーザ光を走査することで、迅速な加工が可能となる。
(もっと読む)
レーザ装置および距離測定装置
【課題】複数種類の波長のレーザ光を発生する構成において、より簡素な構造で出射光の波長の切換が可能な技術を提供する。
【解決手段】レーザ増幅部103の出力側の光軸に、温度によって前記基本波の高調波への変換効率が変化し、反転分極構造を有する非線形結晶107を配置し、その温度を加熱冷却装置108によって制御可能とする。この非線形結晶107は、第2高調波の生成効率が高い温度依存性を有しているので、温度を制御することで、出力に含まれる基本波と第2高調波の割合を調整可能となる。
(もっと読む)
レーザ装置および距離測定装置
【課題】複数種類の波長のレーザ光を発生する構成において、出射光の波長によるビーム中心軸のずれが生じない技術を提供する。
【解決手段】レーザ共振器103の出力側の光軸上に、偏波分離特性を有した非線形結晶107を配置し、基本波と第2高調波を得る。偏波分離特性により、出射位置の異なる基本波と第2高調波とを集光レンズ108を用いて、光ファイバ109に導き、両光線のビーム中心軸を合わせる。これにより、基本波と第2高調波とのビーム中心軸の不一致に起因する測定精度の低下が防止される。
(もっと読む)
障害物検出方法及び装置
【課題】障害物が車両や列車等の物陰に隠れた場合であっても障害物を認識することができ、障害物の検出性能を向上させることができる障害物検出方法及び装置を提供する。
【解決手段】本発明の障害物検出方法は、レーザレーダ1によって所定の監視領域Kを走査し、レーザレーダ1により検知される距離情報と走査方向の情報とから3次元レーダ情報を求め、該3次元レーダ情報から監視領域K内に存在する物体Aを検知し、監視領域K内で一定時間以上継続して滞留している物体Aを障害物Aとして検出し、障害物Aとして検出された物体Aが監視領域K内で検知できなくなった時に、監視領域K内で他の物体Bが検知されている場合には、障害物Aは監視領域K内に滞留していると擬制する。
(もっと読む)
レーダ装置
【課題】設定された距離範囲の反射物を検出するレーダ装置を提供する。
【解決手段】レーザの反射光の強度に応じて受光回路が出力する受信信号は、AD変換器でデジタル信号に変換される。ピーク抽出手段44は、ピーク閾値よりも連続して大きいデジタル信号のグループをピーク領域として抽出し、0以外のピーク番号を付す。マップ比較手段60は、0以外のピーク番号を有するピーク領域を構成するデジタル信号の1個でも、その信号値がマップDPRAM56にサンプリング番号毎に記憶されているマップデータよりも大きいと、そのピーク領域を有効ピーク領域と判断し、有効ピーク領域を構成する全デジタル信号を有効信号として選択する。距離算出手段64は、有効ピーク領域を構成するデジタル信号に基づいて有効ピーク領域のピーク位置を推定し、反射物までの距離を算出する。
(もっと読む)
基板表面変位測定装置
【課題】駆動機構による光センサの移動速度の変化に拘わらず変位データを取得し、その後に一定距離間隔の変位データだけ抽出する構成とすることで、測定時間の短縮を図る。
【解決手段】移動機構手段42により基板10に対する光センサ31の位置を速度が変化しながら移動させる。その移動中に、光センサは光学的に基板10の表面の高さ方向の変位を検出する。A/D変換手段32b及び変位算出手段32aは、光センサからの変位をクロックでデジタルの変位データに変換して出力する。データ取得部50は移動機構手段が移動するときの移動量を基に、移動量の所定間隔毎に、前記変位算出手段32aからの前記変位データを抽出する。画像生成手段60は所定間隔毎の変位データを基に、基板の表面上の形状を示す画像データを生成する構成とした。
(もっと読む)
位置検出装置
【課題】投光側反射手段の回転位置を検出する構成を、より小型に、且つ簡易なものとすることができ、装置全体の小型化、軽量化を効果的に図りうる位置検出装置を提供する。
【解決手段】位置検出手段1は、回転可能なビームスプリッタ50により、光源2からの検出光L1の少なくとも一部を空間に向けて投射すると共に、検出物体からの反射光を、凹面鏡20及びフォトダイオード25を用いて検出している。さらに、フォトダイオード25とは異なる位置に受光センサ10が設けられており、ビームスプリッタ50が所定の回転位置となったときには、ビームスプリッタ50に入射した検出光の少なくとも一部が導光手段によって導かれ、受光センサ10に受光される。そして、この受光センサ10による検出結果に基づいて、ビームスプリッタ50の回転位置が検出される。
(もっと読む)
遠距離視標探査カメラシステム
【課題】構造を簡略化しつつ、遠距離から近距離まで幅広く視標の探査・追跡が可能な遠距離視標探査カメラシステムを提供する。
【解決手段】遠距離の視標を探査する遠距離視標探査カメラシステムは、輻輳運動可能な一対の輻輳カメラ10と、一対の輻輳カメラ10よりも挟角な視野を有する望遠カメラ20と、一対の輻輳カメラ10よりも広角な視野を有する広角カメラと30とからなる。望遠カメラ20は、一対の輻輳カメラ10の視線の交点の軌跡線に略等しい視線を有する。広角カメラ30は、望遠カメラ20の視線に略等しい視線を有する。そして、これらが設置される基台40と、基台40の運動制御を行う基台運動用モータ50とを具備する。
(もっと読む)
視覚装置
【課題】高い分解能および処理の高速化が実現可能な視覚装置を提供する。
【解決手段】物体に対して照射した光の反射光を受光することによって当該物体との距離を測定する視覚装置であり、光源、光学素子、および受光部を備える。光学素子は、光源から発せられる光を反射する反射面の方向を変化させることによって、当該光が照射する方向を主走査方向に走査移動させる。受光部は、光学素子が照射した光が物体に照射された場合、当該物体の表面で反射した散乱光の少なくとも一部を受光する。光源は、複数の発光素子および発光制御部を含む。複数の発光素子は、互いに離間して設けられ、光学素子が有する反射面に向けてそれぞれ光を発する。発光制御部は、複数の発光素子のうち1つを順次発光させる。
(もっと読む)
擬似乱数型パルス列を使うライダーシステム
【課題】レーザーの電力を効果的に増やすよう作用するレーザーパルス列により電力に付随する非線形的影響を減じ、背景ノイズの影響を受けにくいライダーシステムを提供する。
【解決手段】光検出及び測距システムは、複数の光パルスを有する送信光パルスタイミング列30を疑似乱数型タイミングでターゲット36に向けて送信する送信器12を具備する。光学的受信器14は複数の光パルスを有する反射光パルスタイミング列40をターゲット36から受信する。電子制御ユニットは送信光パルスタイミング列30と反射光パルスタイミング列40の間の遅延時間を、送信及び反射光パルスタイミング列40の間の相関関数として識別する。
(もっと読む)
3次元レーザ測距装置
【課題】測定レンジの広い3次元レーザ測距装置を提供する。
【解決手段】レーザセンサ10は、レーザ光源12と小鏡面群を有するポリゴンミラー30と、レーザを小鏡面群のそれぞれに向かうように角度を2次元的に変化させながら反射する揺動ミラー22を有する2次元走査ミラーユニット20を備えている。ポリゴンミラー30の小鏡面群は、それらの法線群が平面内で放射状に伸びている。2次元走査ミラーユニット20は、レーザの反射光が、法線群が平面内で放射状に伸びている小鏡面群のそれぞれに順次向かうように第1軸の周りに揺動ミラー22の角度を変化させ、次に、法線群が他の平面内で放射状に伸びている小鏡面群に順次向かうように第1軸と交差する第2軸の周りに揺動ミラーの角度を変化させる。このレーザセンサ10は、法線群が平面内で放射状に伸びている小鏡面群のそれぞれにレーザを照射することによって広角な走査レンジを達成する。
(もっと読む)
光測距装置
【課題】測定値のばらつきによる影響を抑制し、測定精度を高めることが可能な光測距装置を提供する。
【解決手段】障害物センサ31は、2つの異なる周波数の変調光を交互に出射するように投光素子36を制御する出力制御部41と、受光素子37において受光された変調光に基づいて被投射体Tまでの測定距離を演算する距離演算部42と、2回の第1周波数の変調光によって演算された測定距離の差が、第1所定範囲内にあるかを判定する第1判定部43と、2回の第2周波数の変調光によって演算された測定距離の差が、第2所定範囲内にあるかを判定する第2判定部44と、第1判定部43と第2判定部44との判定結果に基づいて距離演算部42によって演算された測定距離の正誤を判定する総合判定部46とを備えている。
(もっと読む)
距離計及び距離測定方法並びに光学的三次元形状測定機
【課題】 長い距離を高い精度でしかも短時間に測定することが可能な距離計および距離測定方法を提供する。
【解決手段】
第1の光源1から出射されて基準面4に照射される基準光S1と第2の光源2から出射されて測定面6に照射される測定光S2と干渉光S3を基準光検出器3により検出して得られる干渉信号と、上記基準面4により反射された基準光S1’と上記測定面5により反射された測定光S2’との干渉光S4を測定光検出器6により検出して得られる干渉信号を信号処理部7に供給して、上記信号処理部7により、上記干渉光S3を検出した干渉信号と上記干渉光S4を検出した干渉信号の時間差から、光速と測定波長における屈折率から上記基準面までの距離と上記測定面までの距離の差を求める。
(もっと読む)
光学式測定システム
【課題】 高速で高精度な測定を行えるようにすること。
【解決手段】 測定対象120に測定用光を照射する光源部101と、光源部101とは位置関係が無関係であるが相互の位置関係が既知で、測定対象120からの測定用光を偏向する第1、第2光偏向素子108、109と、第1、第2光偏向素子108、109からの測定用光を検出する1つの光検出素子105と、測定対象120から反射した測定用光が第1、第2光偏向素子108、109の双方を介して光検出素子105へ入射する測定対象120上の点Pについて、第1、第2光偏向素子108、109を介して光検出素子105が検出した測定用光に基づいて三角測距法によって測定対象120についての長さに関する情報を算出する演算装置115とを備えている。
(もっと読む)
光学式測定装置および投影板に形成されたパターン
【課題】フォーカスの精度を良好に維持できる光学式測定装置を提供すること。
【解決手段】投影板にはサイズの異なる複数のパターンP1〜P3が形成され、小さなサイズのパターンP1〜P3ほど投影板を透過する光束の中心軸L近くに配置されている。そのため、低倍率の時には、光束の中心軸Lから離れた位置にある大きなサイズのパターンP3が用いられ、高倍率の時には、光束の中心軸Lに近接配置される小さなサイズのパターンP1が用いられることとなるので、ズーミングに伴うパターンP1〜P3のサイズの変化を抑制でき、フォーカスの精度を良好に維持できる。
(もっと読む)
レーザレーダ及びレーザレーダの据付方向調整方法
【課題】据付時の自身の方向調整を簡単且つ高精度で行うことができるレーザレーダ及びレーザレーダの据付方向調整方法を提供する。
【解決手段】投光部2と、投光部2から発したレーザ光LTを走査する走査部3と、計測対象領域Eで反射して戻った反射レーザ光LRを受ける受光部4と、レーザ光LTの投光タイミング及び走査部3による走査を制御する制御部5と、投光タイミング及び受光タイミングに基づいて計測対象領域Eの三次元情報を取得する演算部6と、制御部5から投光指令を受けて投光部2に代わってレーザ光Lを照射して水平面及び垂直面に沿う面状レーザビームH,Vを形成するレーザマーカ10を備え、演算部6では、レーザマーカ10により面状レーザビームH,Vを形成した段階で、走査部3を介して受光部4に戻る面状レーザビームH,Vの水平面情報及び垂直面情報に基づいて、走査部3のピッチ方向,ロール方向及びヨー方向の各調整量を演算する。
(もっと読む)
レーザレーダ及びレーザレーダの較正方法
【課題】自身の座標系を周囲環境の座標系に対して短時間で且つ高精度で一致させることが可能であるレーザレーダ及びレーザレーダの較正方法を提供する。
【解決手段】レーザ光LTを発する投光部2と、投光部2から発したレーザ光LTを走査する走査部3と、走査範囲内の計測対象Tで反射して戻った反射レーザ光LRを受ける受光部4と、レーザ光LTの投光タイミング及び走査部3による走査を制御する制御部5と、レーザ光LTの投光タイミング及び反射レーザ光LRの受光タイミングに基づいて計測対象Tの三次元情報を取得する距離演算部6と、制御部5から投光指令を受けて投光部2に代わって任意の点Pにレーザ光Lを直接照射するレーザマーカ10を備え、距離演算部6では、レーザマーカ10から任意の点Pに対してレーザ光Lを直接照射させる段階で、任意の点Pで反射して受光部4に戻ったレーザ光Lに基づいて、任意の点Pの三次元情報を取得する。
(もっと読む)
121 - 140 / 273
[ Back to top ]