
Fターム[2F112DA15]の内容
Fターム[2F112DA15]に分類される特許
41 - 60 / 273
光波距離測定装置
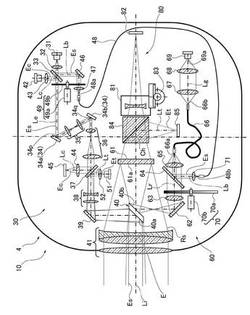
【課題】視準方向の変更を招くことなく所望の位置の測定を可能とする光波距離測定装置を提供する。
【解決手段】光源(31)からの出射光(Es)を目標物へ向けて出射するとともに入射した目標物からの反射光(Rs)を受光部(60)で受光し、出射光と反射光とに基づいて距離測定を行う光波距離測定装置10である。光源から目標物への照射光軸Liに至る光路には、光源の出射光軸Leに対して出射光の方向を傾斜させるべく反射させる偏向反射機構(34)が設けられ、偏向反射機構は、光源から見て偏向反射機構よりも目標物側の出射光軸上もしくは照射光軸Li上の所定位置(E)と光学的に共役の関係とされている。
(もっと読む)
距離測定器及びその製造方法

【課題】低コストで製造され、小型で、検出する光量の損失が少なく、高精度に測定を行うことができる距離測定器を提供する。
【解決手段】光源1は、ホルダ81に固定され、レーザ光Lを射出する。有孔ミラー2は、光源1から射出されるレーザ光1の光軸に対して傾斜し、光源1からレーザ光Lを照射される照射領域Aが、光軸方向から見てレーザ光Lのファーフィールドパターンとなるように、ホルダ81に対して空間的に固定されたホルダ82に固定され、照射領域Aに、レーザ光Lに対して光学的に阻害がない透過部20を有する。走査部3は、透過部20を透過したレーザ光Lを、被測定物7に向けて反射させる。検出部5は、被測定物7において反射し、有孔ミラー2において反射したレーザ光Lを検出する。処理部6は、光源1及び検出部5の駆動を制御し、検出部5の出力に基づいて被測定物7までの距離を算出する。
(もっと読む)
光学走査プローブ
【課題】対象物を光ストライプで照射し、対象物表面から反射した光を検出することで、対象物の表面上の複数の点からデータを捕捉するための走査プローブを提供する。
【解決手段】走査プローブは、(a)光ストライプを生成および発するためのストライプ生成手段14、(b)対象物表面から反射した光ストライプを検出するための画素の配列を有する画像センサを備えるカメラ16、(c)カメラ16によって検出された強度に応じて、フレームの取得中に光ストライプの強度を調節するための手段を備える。ストライプ長を修正する手段、処理手段のための隔離された区分室、およびスキャナのための取り付け可能なダストカバーを有するスキャナにも関する。
(もっと読む)
レーザレーダ
【課題】障害物がレーザレーダに接近した位置に有る場合も、障害物までの距離を精度よく測定することができるレーザレーダを提供する。
【解決手段】レーザレーダ1は、レーザ光を出射するレーザ光源21と、目標領域においてレーザ光を走査させるミラーアクチュエータ24と、目標領域において反射されたレーザ光を受光する光検出器33と、レーザ光のパルス幅を制御するとともに、光検出器33から出力される信号に基づいて目標領域における障害物までの距離を測定するDSP106と、を備える。DSP106は、目標領域における障害物までの距離に適するパルス幅を決定し、決定したパルス幅のレーザ光により障害物との距離を測定する。
(もっと読む)
物体検出ユニット
【課題】外乱光や電気的ノイズによる影響を抑え、物体の検出精度を向上させた物体検出ユニットを提供する。
【解決手段】測距部3は、発光部31と、受光部32とを有する。測距部3は、発光部31を発光させ、受光部32で受光した受光光量に基づき物体を仮検出するとともに、ここで仮検出した物体までの距離を算出する。記憶部5が、物体までの距離の変化に応じて受光部32での受光光量の下限閾値を設定する下限パラメータ、および物体までの距離の変化に応じて受光部32での受光光量の上限閾値を設定する上限パラメータを記憶する。制御部2は、受光部32で受光した受光光量が、測距部3が算出した仮検出した物体までの距離において、下限パラメータで決定される下限閾値と、上限パラメータで決定される上限閾値と、の間に位置していなければ、この仮検出した物体を物体でないと判定する。
(もっと読む)
ミラーアクチュエータおよびビーム照射装置
【課題】ミラーの回動精度を保ちつつ、可動部に対する給電を円滑に行い得るミラーアクチュエータおよびこのミラーアクチュエータを搭載したビーム照射装置を提供する。
【解決手段】ミラーアクチュエータ1は、支軸24について回動可能なミラーユニットフレーム11と、支軸17に配されたミラー19と、マグネットユニット20とミラーユニットフレーム11とを連結するサスペンションワイヤー26a〜26fと、ミラーユニットフレーム11と支軸17とを連結するサスペンションワイヤー16a〜16dとを備える。サスペンションワイヤー16a〜16d、26a〜26fにより、ミラーユニットフレーム11に装着されたチルトコイル11bと、支軸17に装着されたパンコイル12b、13bに給電でき、ミラーユニットフレーム11と支軸17に対し、一定かつ安定的な抗力が付与される。
(もっと読む)
光測距装置
【課題】作業者の作業精度に影響されることなく、可動部の揺動角度を高精度に校正する。
【解決手段】光を2次元走査する光走査部2と、光走査部2を駆動する駆動部3と、光ビームを投光する光源部4と、物体からの反射光を受光する受光部5と、投光及び受光タイミングに基づき物体までの距離を計測する測距部6と、投光タイミングと、入射光線ベクトルと、光走査部の2軸回りの各揺動振幅とを含む変換パラメータを用いて測距部6からの距離データを点群データに変換するデータ変換部7と、基準特徴度データと実測特徴度データとの誤差が閾値以内であるか否かを判定する判定部8と、誤差が閾値より大きい場合、各揺動振幅の実際の値を決定する第1及び第2駆動信号の電流値の少なくとも一方を、判定部8により誤差が閾値以内であると判定されるまで、変更設定可能な設定変更部9と、を備えて構成する。
(もっと読む)
3次元形状測定装置
【課題】受光センサにて受光した反射光のスポットが欠けた場合であっても、精度良く測定対象物の3次元形状を測定できる3次元形状測定装置及び3次元形状測定方法を提供する。
【解決手段】受光信号の強度の閾値としてレベルL1を設ける。受光信号の強度が最も大きい受光素子の位置を基準位置P1(n)とする。基準位置P1(n)の両側から、受光信号の強度がレベルL1である受光素子又はレベルL1に最も近い受光素子の位置を1つずつ取得する。前記取得した2つの受光位置の中点と基準位置P1(n)とのずれ量D1が許容値以下であれば、基準位置P1(n)を反射光の結像位置P(n)と決定し、結像位置P(n)を用いて、その測定ポイントの3次元座標を算出する。ずれ量D1が許容値より大きければ、その測定ポイントの3次元座標を算出しない。
(もっと読む)
光電センサ並びに物体検出及び距離測定方法
【課題】複数のパルスを発射する度に統計分析を行い、ノイズに強い角度分解的な距離測定に応用する。
【解決手段】監視領域に存在する物体の検出及び距離測定するレーザスキャナでり、多数の互いに連続した個別光パルスを出射する発光器、発射光線を周期的に偏向回転可能な偏向ユニット、前記偏向ユニットの角度位置信号を生成する角度測定ユニット、物体により直反射又は拡散反射された受信パルスを生成する受光器、及び、多数の受信パルスを時間的なヒストグラムにまとめ、該ヒストグラムに基づいて物体までの光通過時間を求め、該時間から物体の距離測定値を確定する解析ユニットを備える光電センサにおいて、前記解析ユニットが、その都度の角度位置信号に基づいて受信パルスのグループを選択し、それをヒストグラムにまとめ該グループのヒストグラムに基づいて確定された物体の距離に関する測定値を前記角度位置信号により表される検出角度に割り当てる。
(もっと読む)
距離測定装置
【課題】本発明は、複数ビームを使用した3角測量方式による距離測定装置において、複数ビームの山部のプロファイルの非対称性による測定精度のバラツキを軽減した距離測定装置を提供する。
【解決手段】レーザビームを偏向して、複数点を時分割で同じ時間、且つ、同じ間隔で測定物表面を照射する偏向ビーム生成部13とレーザビームの反射光を1つの走査信号として、レーザビームの偏向タイミングと同期して受光するCCDカメラ部11と、偏向ビーム生成部とCCDカメラ部とを固定する検出基盤部12とを備える検出部1と、CCDカメラ部の出力を一定に制御するAGC21と、当該出力のビームプロファイルの形状と位置の変化から、測定物10表面と検出部1との距離を求める演算部22とを備える。
(もっと読む)
光学式距離計測装置、光学式距離計測装置の距離計測方法および距離計測用プログラム
【課題】低コストで製造することが可能な光学式距離計測装置を提供すること。
【解決手段】光学式距離計測装置1は、所定のパターンを断続的に投射するパターン投射装置2と、イメージセンサにより撮像を行う1台の撮像装置3と、制御装置4を備える。撮像装置3はパターン投射装置2が被写体に所定の投射パターンを投射した状態で撮像を行って第1画像データを取得するとともに、被写体に対して所定の投射パターンが投射されていない状態で撮像を行なって第2画像データを取得する。制御装置4は、第1画像メモリ13aに展開された第1画像データと第2画像メモリ13bに展開された第2画像データの差分から、所定の投射パターンの反射光のみを含む第3画像データを抽出し、第3画像データの画素間の自己相関係数R(x,y)を各画素P(x,y)について算出し、各画素P(x,y)の自己相関係数R(x,y)に基づいて、被写体までの距離を取得する。
(もっと読む)
レーザレーダ装置と出射調整方法
【課題】天候の急変にも即時に追随して人体に障害を与えることなく位置計測が可能なレーザレーダ装置を提供することが目的である。
【解決手段】天候の急変にも即時に追随して、対象物31での第一のレーザ光12Aおよび第二のレーザ光12Bの強度を所定の強度以下になるように、前記第一のレーザ光12Aおよび前記第二のレーザ光12Bの出射強度を調整するレーザレーダ装置1と出射調整方法を提供する。
(もっと読む)
距離測定装置および距離測定プログラム
【課題】物体により反射される反射光に基づいて物体までの距離を測定する距離測定装置において、ダイナミックレンジの広い受光素子を備えることなく反射率の異なる各物体を良好に検出できるようにする。
【解決手段】運転支援システム1において受光部15は、光波を射出する発光部14からの光波が物体に反射されることにより得られる反射光を受光し、この光量に応じて出力をし、レーダ制御部11は、各受光部15による出力に基づいて光波を反射した物体までの距離を演算する。さらに受光部15は、異なる感度を有する複数の受光部15a〜15cを備えている。よって、ダイナミックレンジが広い受光部を利用した場合と同様に、受光部15によって検出可能な反射光の光量の範囲を拡大することができる。よって、ダイナミックレンジが広い受光部を備えることなく反射率の異なる各物体を良好に検出することができる。
(もっと読む)
ビーム照射装置
【課題】光検出器に迷光が入射し易いレイアウトにおいても、レーザ光の走査制御に対する迷光の影響を円滑に抑制することが可能なビーム照射装置を提供する。
【解決手段】ビーム照射装置は、走査用レーザ光が入射するスキャンミラー150とサーボ光が入射するサーボミラー124とを備えたミラーアクチュエータ100を有する。サーボミラー124により反射されたサーボ光は、PSD136により受光される。PSD136に隣接して高速フォトダイオード137が配置される。マイコン12は、PSD136から出力される信号に基づいてミラーアクチュエータ100を制御する。高速フォトダイオード137から出力される信号が所定の閾値を超えると、PSD136から出力される信号が、ノイズキャンセル回路2によって遮断される。
(もっと読む)
レーザ測量機
【課題】簡便に点群データ取得の高速化を可能にするレーザ測量機を提供する。
【解決手段】異なる波長のパルス測距光10a,10bを発する複数の発光源8a,8bを有する光源部2と、各波長毎に時分割して発光させるパルス駆動部9と、前記複数の波長のパルス測距光10a,10bを光軸13上に射出する投光部3と、前記光軸13上に設けられ、前記パルス測距光10a,10bの各波長のみを反射する反射面を複数有し、前記パルス測距光10a,10bを波長毎に分割して測定対象物に向ける様偏向する偏向部材11と、前記測定対象物からの反射測距光10a’,10b’を受光する1つの受光素子12とを有し、該受光素子12からの受光信号24から各パルス測距光10a,10b毎に測距を行う。
(もっと読む)
レーザ画像計測装置
【課題】環境変化に左右されない正確な測距値を取得可能なレーザ画像計測装置を得る。
【解決手段】レーザ光の発振時間と反射光の受光時間との時間差に基づき対象物までの距離を導出するために、基準となる変調信号Mを生成する基準信号発生部20と、変調信号Mにより変調されたレーザ光を出射するレーザ光送信部30と、レーザ光を走査して整形された送信ビームLを出射するレーザ光走査部40と、反射光を受信信号に変換する受信部50と、レーザ光走査部40内のレーザ光走査光学系5から基準固定距離に設置されて送信ビームLが照射される基準反射板6と、受信信号から基準反射板6および対象物の距離値Dzを導出する信号処理部60と、を備える。レーザ光走査部40および受信部50は、基準反射板6からの反射光を、対象物に対する距離測定と同一の光路で送受信する。信号処理部60は、基準反射板6の距離変動量ΔDzから、対象物の距離値を補正する。
(もっと読む)
形状計測装置、ロボットシステムおよび形状計測方法
【課題】計測対象物の走査に要する合計の時間を短くすることが可能な形状計測装置を提供する。
【解決手段】このセンサユニット(形状計測装置)4は、レーザ光を照射するレーザ発生器15と、レーザ発生器15から照射されたレーザスリット光をワーク200の載置されている領域に走査するミラー部16と、ミラー部16から照射され、計測対象物により反射されたレーザ光の反射光を検出することにより、ワーク200の載置されている領域を検出するとともに、ワーク200の3次元計測を行う高速カメラ11と、高速カメラ11によって検出されたワーク200の載置されている領域に応じてミラー部16による走査範囲を変更するように制御するセンサコントローラ13とを備える。
(もっと読む)
レーザ測定装置
【課題】検出エリア内におけるレーザ光の実際の照射高さを容易に計測し得るレーザ測定装置を提供する。
【解決手段】レーザ測定装置100は、レーザレーダ装置1と検出用基準物体90とを備えている。検出用基準物体90の反射部は、所定の高さ方向における各位置が高さに応じた構造をなし、且つレーザ光L1が入射したときに、当該レーザ光L1が入射する高さに応じた内容の特定反射光を発するように構成されている。一方、レーザレーダ装置1は、回動反射機構40から照射されるレーザ光L1の走査エリア上に検出用基準物体90が配置されたときにこの検出用基準物体90からの特定反射光を検出している。そして、反射光の状態と高さ情報とを対応付ける対応データを参照して特定反射光の状態に対応する高さ情報を求め、検出用基準物体90におけるレーザ光の照射高さを計測している。
(もっと読む)
距離測定装置および距離測定方法
【課題】測定対象の表面状態によって生じる計測誤差を低減することができる距離測定装置および距離測定方法を提供する。
【解決手段】可動プレート5は、直動案内ユニット8によって固定プレート9に対して摺動可能となっている。可動プレート5には、投光素子および受光素子が収容されたケーシング2が固定されている。固定プレート9には、出力軸13に偏心ローラ14が設けられた電動モータMが固定されている。電動モータMが駆動して偏心ローラ14が回転すると、伝達プレート15によって可動プレート5およびケーシング2が往復動する。電動モータMの駆動中に複数回、受光素子の受光結果を分析して平均値を出力する。
(もっと読む)
ビーム光投受光装置
【課題】同軸系タイプのビーム光投受光装置のコンパクト化及び組立て調整作業の容易化を図る。
【解決手段】光源210からスキャンミラー240に向かう投光ビームの光路と、対象領域内の物体から反射しスキャンミラー240から受光素子260に向かう戻り光の光路を分離する投受光分離部材を、1つのプリズム230で形成し、プリズム230は、投光ビームをスキャンミラー240方向に反射する反射領域231(外側反射面)と、スキャンミラー240からの戻り光を透過する透過領域232と、この透過領域232を透過した戻り光をプリズム内部で受光素子260方向に反射する内側反射面Dと有する構成である。
(もっと読む)
41 - 60 / 273
[ Back to top ]