
Fターム[2F112DA26]の内容
Fターム[2F112DA26]に分類される特許
21 - 40 / 248
変位検出装置
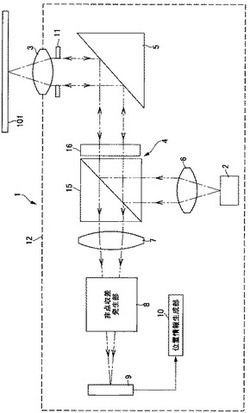
【課題】光源からの光を回折格子が設けられた領域で反射させて、被測定面の変位を検出する変位検出装置を提供する。
【解決手段】変位検出装置1は、光源2と、対物レンズ3と、分離光学系4と、コリメータレンズ7と、非点収差発生部8と、受光部9と、位置情報生成部10と、絞り部材11とを備えている。そして、対物レンズ3から出射され、被測定面に向けて集光される光の光軸に対する角度をθ、光源2の波長をλ、被測定面101に形成された回折格子のピッチをd、回折格子による回折光の次数をnとした場合に、遮蔽部11は、
を満たす反射光を遮蔽する。
(もっと読む)
光学式位置検出装置、光学式位置検出システム、および入力機能付き表示システム

【課題】広い範囲にわたって対象物体の三次元的な位置を光学的に検出することのできる光学式位置検出装置、光学式位置検出システム、および入力機能付き表示システムを提供すること。
【解決手段】光学式位置検出装置10において、第1光源モジュール126および第2光源モジュール127によって、検出光L2の放射角度範囲において強度が変化する光強度分布を形成した際の受光部13の受光強度に基づいて対象物体ObのXY座標を検出する。第1光源モジュール126および第2光源モジュール127は、Z軸方向で離間しており、検出光L2の放射角度範囲において強度が一定の光強度分布を形成した際の受光部13の受光強度に基づいてZ軸方向における対象物体Obの位置を検出する。
(もっと読む)
固体撮像装置
【課題】画素の駆動精度を低下させることなく、グローバルシャッタ動作の高速化を図る固体撮像装置を提供する。
【解決手段】光を検知して光電子を発生する光電変換素子と、1つ以上のMOSダイオード構造を構成する電極を有する単位画素と、前記電極に第1電圧を供給する第1電圧源側に設けられた第1接点と、前記電極に前記第1電圧より高い第2電圧を供給する第2電圧源側に設けられた第2接点と、前記第1接点と前記第2接点との間に設けられた第1コンデンサと、前記第1接点及び前記第2接点のどちらか一方に接続することで、前記電極に印加させる電圧を、選択的に前記第1電圧又は前記第2電圧に切り換える切換スイッチと、前記切換スイッチを駆動させて交互に前記第1電圧と前記第2電圧とを前記電極に印加させることで、前記光電子の発生、保持、転送、リセット、及び排出のいずれかを行う画素駆動部とを備える。
(もっと読む)
測距システム
【課題】光源の強度や環境光に依存しない信頼性の高い距離情報を取得することができる測距システムを提供する。
【解決手段】照射装置と固体撮像装置と演算部とを備える測距システムであって、前記固体撮像装置は、第1照射タイミングで照射された照射光の反射光を第1受光期間及び第2受光期間で受光するとともに、第2照射タイミングで照射された前記照射光の前記反射光を、第3受光期間及び第4受光期間でそれぞれ受光し、前記演算部は、前記第1受光期間〜前記第4受光期間で得られた光電子数を用いて、測距対象までの距離を算出し、前記第1受光期間及び前記第3受光期間は、前記反射光が前記固体撮像装置に到達してから該反射光の強度が最大になるまでの時間を含み、前記第2受光期間及び前記第4受光期間は、前記固体撮像装置に到達する前記反射光の強度が減少してから該反射光の前記固体撮像装置への到達が終了するまでの時間を含む。
(もっと読む)
共焦点計測装置
【課題】本発明は、共焦点光学系を利用して計測対象物の変位を計測する共焦点計測装置であって、光の波長による、計測対象物の変位を計測する精度の変動を抑えた共焦点計測装置を提供する。
【解決手段】本発明は、共焦点光学系を利用して計測対象物の変位を計測する共焦点計測装置である。共焦点計測装置100は、白色LED21と、白色LED21から出射する光に、光軸方向に沿って色収差を生じさせる回折レンズ1と、回折レンズ1より計測対象物200側に配置され、回折レンズ1で色収差を生じさせた光を計測対象物200に集光する対物レンズ2と、対物レンズ2で集光した光のうち、計測対象物200において合焦する光を通過させるピンホールと、ピンホールを通過した光の波長を測定する波長測定部とを備えている。回折レンズ1の焦点距離は、回折レンズ1から対物レンズ2までの距離と、対物レンズ2の焦点距離との差より大きい。
(もっと読む)
動体判別機能付き電子機器
【課題】測定対象物が動体であるか否かを正確に判別することができるコンパクトな動体判別機能付き電子機器を提供する。
【解決手段】動体しきい値記憶手段104の動体しきい値を、測定対象物までの距離が遠い場合には大きく、測定対象物までの距離が近い場合には小さくなるように、測定距離範囲毎に予め設定する。動体判定手段106は、測距値の最大値と最小値の差が所定の動体しきい値よりも大きい場合に測定対象物が動体であると判定する。
(もっと読む)
共焦点変位センサ
【課題】より簡単かつ安価に振動部を作製することが可能な共焦点変位センサを得る。
【解決手段】共焦点変位センサにおける振動部40は、固定体46と、一端41A側の側面41Sが固定体46に固着され、他端41B側に設けられた第1レンズ31を光軸に沿うように往復移動させる第1振動子41と、一端42A側の側面42Sが固定体46に固着される第2振動子42と、を含み、固定体46、第1振動子41、および第2振動子42は、平板状の部材からそれぞれ形成される。
(もっと読む)
形状計測装置
【課題】計測対象物体の形状を高速かつ高精度に計測する装置を提供する。
【解決手段】計測対象物体21の形状を計測する装置であって、光源用基板32と、該光源用基板32上に配置された複数の格子投影用LED33とを有する格子投影用光源31と、1次元格子が描かれた格子面を含む、光源用基板32に平行に配置された格子プレート34とを有する格子投影部30と、1次元格子が投影された計測対象物体21を撮影する撮影部11と、撮影された画像に対して位相解析処理を施して、計測対象物体21の形状を求める解析制御装置12とを備え、複数の格子投影用LED32の各々の光軸が、光源用基板32の法線に対して、計測対象物体21側に傾斜していることを特徴とする。
(もっと読む)
光学的情報読取装置
【課題】測距処理の高速化を図り、確実に測距を行うことができる光学的情報読取装置を提供する。
【解決手段】光学的情報読取装置1Aは、光の照射領域102aと非照射領域103aが組み合わせられた測距パターン101aを読取対象物に形成する測距光Saを出射する測距光出射部2を備え、読取対象物に形成された測距パターン101aを固体撮像素子3で撮像して測距パターン101aの画像を取得し、画像信号で信号が落ち込む部分を検出して、測距パターン101aの非照射領域103aの座標に基づき測距を行う。
(もっと読む)
光学式位置検出装置
【課題】少ない部品で対象物体の位置を高い分解能で検出することのでき、さらには、少ない部品で対象物体の三次元座標を高い分解能で検出することのできる光学式位置検出装置を提供する。
【解決手段】光学式位置検出装置10では、導光部材40、第1検出用光源121および第2検出用光源122を備えた線状光源ユニット13が複数並列配置されており、点灯した線状光源ユニット13が切り換わった際の光検出部30での受光結果によりY軸方向(第2方向)における対象物体Obの位置を検出する。また、第1検出用光源121と第2検出用光源122とが順次点灯した際の光強度分布を利用してX軸方向における対象物体Obの位置を検出する。さらに、第1検出用光源121および第2検出用光源122が同時点灯した際の光強度分布を利用してZ軸方向における対象物体Obの位置を検出する。
(もっと読む)
光学式検出装置、電子機器及び投射型表示装置
【課題】広い検出エリアにおいて検出精度の均一化ができる光学式検出装置、電子機器及び投射型表示装置等を提供すること。
【解決手段】光学式検出装置は、照射光LTを出射する照射部EUと、検出エリアRDETに存在する対象物OBにより照射光LTが反射することによる反射光LRを受光する受光部RUと、受光部RUの受光結果に基づいて、対象物OBの位置検出情報を検出する検出部110とを含む。照射部EUは、検出エリアRDETが設定される対象面SOBに対して斜め方向となる第1の面SF1と、対象面SOBに対して斜め方向となり、且つ、第1の面SF1よりも対象面SOBとの成す角が大きい第2の面SF2とにより規定される照射範囲に、第1の面SF1に沿う方向において第1の強度であり、第2の面SF2に沿う方向において第1の強度よりも強度が低い第2の強度である照射光LTを出射する。
(もっと読む)
物体検出ユニット
【課題】外乱光や電気的ノイズによる影響を抑え、物体の検出精度を向上させた物体検出ユニットを提供する。
【解決手段】測距部3は、発光部31と、受光部32とを有する。測距部3は、発光部31を発光させ、受光部32で受光した受光光量に基づき物体を仮検出するとともに、ここで仮検出した物体までの距離を算出する。記憶部5が、物体までの距離の変化に応じて受光部32での受光光量の下限閾値を設定する下限パラメータ、および物体までの距離の変化に応じて受光部32での受光光量の上限閾値を設定する上限パラメータを記憶する。制御部2は、受光部32で受光した受光光量が、測距部3が算出した仮検出した物体までの距離において、下限パラメータで決定される下限閾値と、上限パラメータで決定される上限閾値と、の間に位置していなければ、この仮検出した物体を物体でないと判定する。
(もっと読む)
位置検出システム、表示システム及び情報処理システム
【課題】 撮像装置のレンズ及び撮像素子を対象面と平行な方向に沿う方向に配置するこ
とで、撮像画像における歪みを抑止し、位置検出の精度を向上させる位置検出システム、
表示システム及び情報処理システムを提供すること。
【解決手段】 位置検出システム400は、撮像画像を撮像する撮像部500と、撮像部
500からの撮像画像に基づいて、対象面20に設定された検出エリアでの対象物OBの
座標情報を求める座標演算部430と、を含み、撮像部500は、レンズ部LEを有する
光学系と、撮像素子IMとを含み、撮像部500から対象面20の中央部へと向かう方向
である第1の方向と、対象面20のなす角度α1とし、レンズ部LEの光軸方向である第
2の方向と対象面20のなす角度をα2とした場合に、角度α1及び角度α2は、α1<
α2を満たす。
(もっと読む)
光学式位置検出装置および位置検出システム
【課題】広い範囲にわたって対象物体の位置を光学的に検出することのできる光学式位置検出装置、および位置検出システムを提供すること。
【解決手段】光学式位置検出装置10において、検出用光源部12は、検出光L2の出射強度が出射角度範囲の一方側から他方側に向かって減少する第1点灯動作と、検出光L2の出射強度が出射角度範囲の他方側から一方側に向かって減少する第2点灯動作とを行う。従って、第1点灯動作時における受光部13の受光強度と第2点灯動作時における受光部13の受光強度との比較結果に基づいて検出用光源部12に対する対象物体Obの角度位置(角度θ)を検出でき、検出用光源部12が検出光L2を出射した際の受光部13の受光強度に基づいて検出用光源部12から対象物体Obまでの距離rを検出できる。
(もっと読む)
体積検出装置、及び、体積検出方法
【課題】対象物の位置や姿勢、挙動等によって隠蔽部が生じることがあっても、シート上の対象物の体積を正確に検出することのできる体積検出装置、及び、体積検出方法を提供する。
【解決手段】対象物の距離画像データを距離画像センサ4で取得する。取得した距離画像データをデータ記録手段25に記録する。可視部分から推定される対象物の体積を現在体積算出手段24によって算出する。現在と過去の距離画像データを比較し、対象物の中で距離画像センサ4の位置から隠れている部分の体積を隠蔽体積算出手段26によって検出する。現在体積算出手段24で算出した体積と、隠蔽体積算出手段26で算出した体積と、を基に対象物の体積を算出する。
(もっと読む)
光学式変位センサ及び該光学式変位センサにおける段差検出方法
【課題】段差候補となる期間を検出してから、ベルトコンベア等の搬送装置の振動等による変位量の変動、時間方向の変位量の変動の影響を低減し、より確実に段差を検出することができる光学式変位センサ及び該光学式変位センサにおける段差検出方法を提供する。
【解決手段】受光器の出力に基づいて検出対象物の変位量を算出し、所定のタイミングでサンプリングする。前回サンプリングした変位量と今回サンプリングした変位量との差分値を算出し、算出した差分値に基づいて段差期間と非段差期間とを判別する。段差期間と判別された期間における差分値の積算値を算出し、段差期間と判別された期間ごとに算出した積算値の最大値と第一の閾値とを比較して段差であるか否かを判別する。
(もっと読む)
光学式位置検出装置および位置検出機能付き機器
【課題】対象物体以外の物体で反射した検出光の影響を受けずに対象物体の位置を検出することができる光学式位置検出装置、および位置検出機能付き機器を提供すること。
【解決手段】光学式位置検出装置10においては、複数の検出用光源12を順次点灯させると、第1受光部31は、対象物体Obで反射した検出光L3を受光する。その際、第1受光部31には、対象物体Ob以外の物体Sbで反射した検出光L4が入射する場合があるが、光学式位置検出装置10には、検出対象空間10Rに入射しない補償光L5を出射する補償用光源部81と、検出光L2、L3、L4を受光せずに補償光L5を受光する第2受光部32とが設けられており、位置検出部50は、第1受光部31での受光強度と第2受光部32での受光強度との差に基づいて対象物体Obの位置を検出する。
(もっと読む)
乗員頭部検知装置
【課題】演算負荷の増大を防止しつつ検知精度を向上させる。
【解決手段】乗員頭部検知装置10は、単眼距離画像センサ11から出力される距離画像を構成する複数の画素毎に3次元空間での法線ベクトルの逆方向に固定長の逆ベクトルを算出し、該逆ベクトルにより指定される3次元空間での位置座標を内部座標とする内部座標設定部52と、3次元空間を構成する複数の単位空間毎に該単位空間内に含まれる内部座標の総数に係るスコア値を算出し、複数の画素毎に対応する内部座標が含まれる単位空間のスコア値を複数の画素毎に対応させて示すスコア画像を生成するスコア画像生成部53とを備え、スコア画像を構成する複数の画像領域のうちからスコア値に基づいて車室内の乗員の頭部領域を抽出する。
(もっと読む)
光学式位置検出装置および位置検出機能付き機器
【課題】対象物体が傾いている場合や対象物体のサイズが部分によって相違している場合でも、対象物体の位置を精度よく検出することのできる光学式位置検出装置、および位置検出機能付き機器を提供すること。
【解決手段】光学式位置検出装置10は、検出用光源12から検出光L2を出射し、検出対象空間10Rの対象物体Obで反射した検出光L2の一部を光検出器30で受光して対象物体Obの位置を検出する。また、入射光選択部20は、検出対象空間10R(空間10R1、10R2、10R3)のうち、一部の空間についてはこの一部の空間から光検出器30への反射光L3の入射が許容された選択状態とし、他の空間については他の空間から光検出器30への反射光の入射が阻止された非選択状態とする。また、入射光選択部20は、選択状態とされる空間および非選択状態とされる空間をZ軸方向で切り換える、
(もっと読む)
姿勢検出装置
【課題】人物にマーカーを設置することなく、人物の姿勢を高精度で検出する。
【解決手段】各画素における輝度値がカメラから物体までの距離を示す距離画像を取得する距離画像取得部10と、前記距離画像取得部10が取得した前記距離画像に基づいて、三次元空間中での物体の座標を計算する座標計算部20と、前記座標計算部20が計算した物体の座標に基づいて、三次元空間中で所定の体積しきい値以上の体積を占める物体の領域である人物領域を決定する人物領域決定部30と、前記人物領域決定部30が決定した前記人物領域に、人体の骨格をモデル化した骨格モデルを当てはめることにより被写体人物の姿勢を検出する姿勢検出部40とを備える。
(もっと読む)
21 - 40 / 248
[ Back to top ]