
Fターム[2F112DA26]の内容
Fターム[2F112DA26]に分類される特許
41 - 60 / 248
姿勢検出装置
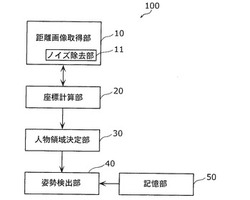
【課題】人物にマーカーを設置することなく、人物の姿勢を高精度で検出する。
【解決手段】各画素における輝度値がカメラから物体までの距離を示す距離画像を取得する距離画像取得部10と、前記距離画像取得部10が取得した前記距離画像に基づいて、三次元空間中での物体の座標を計算する座標計算部20と、前記座標計算部20が計算した物体の座標に基づいて、三次元空間中で所定の体積しきい値以上の体積を占める物体の領域である人物領域を決定する人物領域決定部30と、前記人物領域決定部30が決定した前記人物領域に、人体の骨格をモデル化した骨格モデルを当てはめることにより被写体人物の姿勢を検出する姿勢検出部40とを備える。
(もっと読む)
距離センサ及び距離画像センサ

【課題】不要なノイズ成分の発生を抑制し、高精度な距離検出を行なうことが可能な距離センサ及び距離画像センサを提供すること。
【解決手段】距離画像センサ1は、光入射面1FTと裏面1BKとを有する半導体基板1A、フォトゲート電極PG、第1及び第2ゲート電極TX1,TX2、第1及び第2半導体領域FD1,FD2、並びに第3半導体領域SR1を備えている。フォトゲート電極PGは、光入射面1FT上に設けられる。第1及び第2ゲート電極TX1,TX2は、フォトゲート電極PGに隣接して設けられる。第1及び第2半導体領域FD1,FD2は、各ゲート電極TX1,TX2の直下の領域に流れ込む電荷を蓄積する。第3半導体領域SR1は、第1及び第2半導体領域FD1,FD2から裏面1BK側に離れて設けられ、第1及び第2半導体領域FD1,FD2と逆の導電型である。
(もっと読む)
距離画像センサ及び距離画像生成装置並びに距離画像データ取得方法及び距離画像生成方法
【課題】低価格な距離画像センサ及び距離画像生成装置並びに距離画像データ取得方法及び距離画像生成方法を提供する。
【解決手段】距離画像センサ100は、x軸、y軸、及びz軸からなる座標空間において、入射された平行光が複数の分割光に分割され、z軸に交差する所定の投光平面上に、複数の分割光が形成する複数の投光スポットによって画定される複数の線分とx軸とが成す複数の角度が所定の角度となるように、入射される平行光の進行方向を変更する回折格子が形成された回折光学素子131及び132を備える。さらに、距離画像センサ100は、複数の分割光によって対象物上に形成される複数の投光スポットで画定される複数の線分のx軸に対する傾きに基づいて、複数の投光スポットとの複数の距離を測定する(決定する)距離測定部(距離決定部)117とを備える。
(もっと読む)
三次元及び色彩検出における電荷管理のための方法及び装置
【課題】距離計、画像マッピング、三次元画像キャプチャ、及び人間の色感覚によって限定されない色感覚での画像のキャプチャを含み得る三次元応用例に適したCMOS実装可能な画像センサ、及び、そのような検出器の検出特性を改善する。
【解決手段】オンチップ測定情報を、順番にではなく、ランダムに出力することができ、三次元画像を必要とするオブジェクト追跡、及び他の情報のためのオンチップ信号処理を、すぐに遂行することができる。システム全体は小さく、強固で、かなり少ないオフチップの別個の構成要素を必要とし、かつ、検出信号特性の改善を示す。オンチップ回路は、そのようなTOFデータを使って、場面内の一つのオブジェクト、又は全てのオブジェクト上の全ての点の距離及び速度を、同時に、容易に測定することができる。オンチップ回路はまた、検出センサ内の各画素における検出画像の分光組成を特定することができる。
(もっと読む)
情報処理装置、情報処理方法、プログラム、及び電子装置
【課題】情報処理装置とユーザとの距離に拘らず、違和感なく情報処理装置を操作できるようにする。
【解決手段】肌領域検出部61は、画像上からユーザの肌を表す肌領域を検出し、特徴点抽出部62は、肌領域の特徴点を抽出し、距離算出部63は、肌領域に基づいて、ユーザまでの距離を算出し、座標変換部46は、距離に応じて、特徴点を所定の座標空間上の座標点に変換するための変換係数を決定し、決定した変換係数に基づいて、特徴点を所定の座標空間上の座標点に変換する。本発明は、例えば、撮像された画像から、ユーザの肌領域を検出する検出装置に適用できる。
(もっと読む)
光学式位置検出装置および位置検出機能付き機器
【課題】対象物体が存在しない状態でも、光源部における発光強度に対応する強度の光をデフォルト光として受光部に入射させることができ、かかるデフォルト光の受光結果に基づいて、光源部での駆動電流と受光部での受光強度との関係を適正に初期設定することができる光学式位置検出装置、および位置検出機能付き機器を提供すること。
【解決手段】光学式位置検出装置10では、光源部12を点灯させた際の受光部30での受光結果に基づいて対象物体Obの位置を検出する。光学ユニット11のハウジング16の前側ハウジング部分163、164には、対象物体Obが存在しない状態でも、受光部30にデフォルト光DLを入射させるデフォルト光生成用反射部166、167が構成されている。従って、デフォルト光DLの受光結果に基づいて、光源部12での駆動電流と受光部30での受光強度との関係を適正に初期設定することができる。
(もっと読む)
光学式位置検出装置および位置検出機能付き機器
【課題】検出光が出射される第1方向、および第1方向に交差する第2方向における対象物体の位置を同一の原理で広い範囲にわたって検出することができる光学式位置検出装置および位置検出機能付き機器を提供すること。
【解決手段】光学式位置検出装置10では、第1光源部12A、第2光源部12Bおよび第3光源部12Cのうち、X軸方向で離間する光源部12を順次点灯させた際の受光部30での受光結果、およびZ軸方向で離間する光源部12を順次点灯させた際の受光部30での受光結果に基づいて対象物体ObのZ軸方向の位置およびX軸方向の位置を検出する。第1光源部12A、第2光源部12Bおよび第3光源部12Cはいずれも、検出光L2の出射方向がZ軸方向であり、同一である。このため、検出光Lの出射方向(Z軸方向)において広い範囲にわたって、対象物体Obの位置を検出することができる。
(もっと読む)
光学式位置検出装置、位置検出機能付き機器および位置検出方法
【課題】対象物体に向き(方向性)があっても対象物体の位置を精度よく検出することができるとともに、対象物体の向きを検出することのできる光学式位置検出装置、位置検出機能付き機器、および位置検出方法を提供すること。
【解決手段】位置検出機能付き機器1の光学式位置検出装置10において、複数の光源部12が検出光L2を出射した際に対象物体Obで反射した検出光を受光部30で検出して対象物体Obの位置に対応する複数のデータを生成した後、複数のデータが多数データか少数データかを判定する。そして、多数データに基づいて対象物体Obの位置を検出し、少数データに基づいて対象物体Obの向きを検出する。
(もっと読む)
変位検出装置
【課題】対物レンズを正確に変位させることにより、精度の高い測定を行うことのできる変位検出装置を提供する。
【解決手段】変位検出装置1では、対物レンズ3が光源2からの出射光を被測定面101に向けて集光する。被測定面101からの反射光の光路は、分離光学系4により光源2から出射光の光路と分離される。分離光学系4を通った反射光は、集光手段7により集光され、非点収差発生手段8により非点収差が発生した状態で受光部9に入射する。受光部9の直近に設けられた入射光束径調整手段12は、受光部9へ入射する被測定面からの反射光の光束径を調整する。位置情報生成部10は、受光部9で検出した光量から得られるフォーカスエラー信号及びSUM信号を用いて被測定面101の位置情報を生成する。
(もっと読む)
測距装置および電子機器
【課題】測距と同時に方向検知を可能とする測距装置を提供する。
【解決手段】測距装置は、第1の発光素子105aおよび第2の発光素子105bと、受光素子106と、演算部110とを有する。演算部110は、受光素子106の光強度分布において、強度が最も強くなる地点を最大ポイントと定義し、光強度分布の両端を第1の最端ポイントおよび第2の最端ポイントと定義したとき、最大ポイントと第1の最端ポイントとの間の距離と最大ポイントと第2の最端ポイントとの間の距離との比率に基づいて、被検出物までの距離と被検出物の移動方向とを演算する。
(もっと読む)
処理装置、光学式検出装置、表示装置及び電子機器
【課題】対象物の反射率の影響などを低減して精度の高い検出ができる処理装置、光学式検出装置、表示装置及び電子機器等を提供すること。
【解決手段】処理装置100は、第1、第2の光源部LS1、LS2からの照射光LT1、LT2が対象物OBに反射されることによる反射光LR1、LR2を受光する受光部RUの受光結果に基づいて、第1、第2の光源部LS1、LS2の発光制御を行う制御部110と、発光制御を行うための発光電流制御情報に基づいて、第1、第2の光源部LS1、LS2に対する対象物OBの位置関係を判定する判定部120とを含む。判定部120は、対象物OBが検出領域に存在しない第1の期間での発光電流制御情報である第1期間用発光電流制御情報LCNinitと、対象物OBが検出領域に存在する第2の期間での発光電流制御情報である第2期間用発光電流制御情報LCNdetとに基づいて、対象物OBの位置関係を判定する。
(もっと読む)
光学式位置検出装置および位置検出方法
【課題】検出用光源から出射された検出光の一部が対象物体で反射せずに光検出器に入射
することに起因する検出誤差を解消することのできる光学式位置検出装置を提供すること
。
【解決手段】光学式位置検出装置10は、検出光L2を出射する複数の検出用光源12、
および対象物体Obで反射した検出光を受光する光検出器30に加えて、検出空間10R
を経由せずに光検出器30に入射する参照光Lrを出射する参照用光源12Rを有する。
検出空間10Rに対象物体Obが存在する状態で、複数の検出用光源12の一部を点灯さ
せる第1検出用光源点灯動作、他の一部を点灯させる第2検出用光源点灯動作、および参
照用光源点灯動作を行うとともに、検出空間10Rに対象物体Obが存在しない状態でも
第1検出用光源点灯動作、第2検出用光源点灯動作および参照用光源点灯動作を行なう。
(もっと読む)
飛行時間撮像装置
【課題】飛行時間測定を使用した深度図を生成するための改良された解法に関し、特に飛行時間撮像装置およびより精度良い飛行時間撮像方法を提供する。
【解決手段】飛行時間撮像装置6のセンサ5の画素アレイ内の伝播遅延を考慮した、深度修正プロファイルは測定された深度図に応用される。前記深度修正プロファイルは、2つのn次元多項式の重ね合わせである。
(もっと読む)
撮像デバイス及び撮像装置
【課題】光源から投射された光を利用して被写体までの距離を取得する距離画像センサ、及び光源から投射された光により生体を検出する生体検出センサの機能を、RGB等の画像及び近赤外光画像を取得する1つの撮像デバイスを用いて実現する。
【解決手段】本発明の撮像デバイスは、光学フィルタ32、可視光センサ(2つの層38と39で形成される可視光センサ)と近赤外光センサ(2つの層36と37で形成される非可視光センサ)を光の進入方向に配置し、可視光画像と近赤外光画像を分離して出力する出力部40を有する。そのため、各画像間の画像ズレがなく、かつ解像度の欠損もなく、距離測定や生体検出の機能を高解像度撮像が可能な1つの撮像デバイスを用いて実現することが可能となる。
(もっと読む)
光電センサ
【課題】より簡易な構成で、高速に対象物までの距離を測定する。
【解決手段】光を投光する投光部1と、投光部1により投光された光を受光する受光部2と、受光部2により受光された光量に基づいて、予め設定した定数を用いた累乗近似により、受光部2から投光部1までの距離を測定する演算部3とを備えた。
(もっと読む)
光学式位置検出装置
【課題】光検出器の感度指向性の影響を受けにくくすることにより、対象物体の位置にか
かわらず光検出器での受光強度を高いレベルとすることのできる光学式位置検出装置を提
供すること。
【解決手段】光学式位置検出装置10において、光検出装置30は、光検出器31を変位
させて光検出器31の受光部32を検出空間10R内の複数領域10R1、10R2、1
0R3に向かせるアクチュエータ35を備えており、光検出器31は、受光部32が検出
空間10R内の複数の領域10R1、10R2、10R3に向いた状態で、対象物体OB
で反射した検出光を検出する。このため、光検出器31が感度指向性を有する場合でも、
光検出器31の高感度角度範囲Θhのみで検出空間10R全体をカバーすることができる
。
(もっと読む)
時間計測装置および距離計測装置
【課題】簡易な構成で高精度の時間計測を行うことができる時間計測装置を提供する。
【解決手段】時間計測装置10は、定電流源11,制御部12,演算部13,容量素子C1〜C3,抵抗器R,スイッチSW0〜SW3,SW11〜SW13を備える。制御部12は、発光タイミング信号および受光タイミング信号を入力し、tacoff信号,tac1信号,tac2信号,tac3信号,reset1信号,reset2信号,reset3信号を生成して各スイッチへ与え、スイッチの開閉動作を制御する。演算部13は、スイッチSW1と容量素子C1との接続点の電位Vout1、スイッチSW2と容量素子C2との接続点の電位Vout2、および、スイッチSW3と容量素子C3との接続点の電位Vout3を入力して、電位Vout1〜Vout3に基づいて演算を行う。
(もっと読む)
距離測定装置
【課題】アイセーフ波長のレーザ光を用いて低コストかつ高精度に距離を測定する。
【解決手段】レーザ光源24からのアイセーフ波長のレーザ光は、ポリゴンミラー21により走査されつつ測定対象に照射される。測定対象からの光はGLV32へと導かれ、GLV32からの回折光が光検出器35にて受光される。光検出器35は単一のフォトダイオードを備える。GLV32からは可干渉性の強い光のみが光検出器35へと導かれるため、レーザ光に由来する光のみが光検出器35にて検出される。GLV32において回折光を出射する領域を移動することにより、レーザ光に由来する光の入射位置が求められる。これにより、背景光の影響を受けることなく精度よく距離を測定することができる。また、単一のフォトダイオードを用いることにより、アイセーフ波長の光を低コストにて検出することができる。
(もっと読む)
対象物検出装置
【課題】対象物か否かを判断する情報を残しながらも情報量を低減させ、距離画像を用いた対象物の検出における処理負荷を従来よりも低減する。
【解決手段】アクティブ型の距離画像センサ1により距離画像を生成する。背景取得手段2は背景距離画像を記憶し、差分画像生成手段3は、距離画像と背景距離画像とから距離差分画像を生成する。注目画素抽出手段4は、距離差分画像における画素値が存在閾値以上である画素を距離画像から注目画素として抽出し、密度計測手段5では、注目画素を3次元の仮想空間にマッピングし単位体積のブロックごとに注目画素の個数を密度として求める。有効ブロック抽出手段6は、密度が対象閾値以上であるブロックを有効ブロックとして抽出し、領域統合手段7は、隣接する有効ブロックを統合してグループを形成する。対象物判別手段8は、グループのサイズが適正範囲であれば、対象物として判別する。
(もっと読む)
光生成器
光源を備えるシーンを照明するための構造化光生成器であり、光導波路(304)が、長手方向軸線を有し、かつ万華鏡風にシーンに向かって光源の個別の画像の配列を投射するように配置される略反射側部を有する筒状部を備え、前記光生成器は、投射軸線および光導波路軸線が互いに対して傾斜しているように光を再配向する光偏向素子を含む。このように、概して細長い構造体である光導波路は、光投射の方向から遠ざかるように「折り畳まれる」ことができ、それにより、投射の方向の厚さが望ましく最小限にされる光生成器のパッケージによって利点が提供される。  (もっと読む)
(もっと読む)
41 - 60 / 248
[ Back to top ]