
Fターム[2F129AA20]の内容
航行(Navigation) (246,646) | 航行体 (14,848) | その他 (51)
Fターム[2F129AA20]に分類される特許
21 - 40 / 51
可動機械用の位置監視システム
可動機械(20)および中央制御ステーション(30)を有するシステム(10)を提供する。可動機械は、通信装置(70)と、測位衛星(40)から位置データを受信するとともに位置信号を生成するように構成された受信機(55)を有する位置監視システム(50)とを有する。位置監視システムはまた、センサ(61、62、63)を有し、可動機械のパラメータを測定するとともに移動信号を生成するように構成された、慣性航法装置(60)も有する。位置監視システムはまた、位置信号および移動信号を受信し、位置信号が受信できないことを検出し、位置パラメータを計算し、パラメータの第1値と第2値との差が所定閾値を超えるか否かを確定し、警報信号を生成するように構成された、コントローラ(65)も有する。中央制御ステーションは、コントローラと通信し、位置信号および/または移動信号を受信し、可動機械の位置を監視するように構成されている。  (もっと読む)
(もっと読む)
経路探索装置、経路探索方法、及び自律移動体
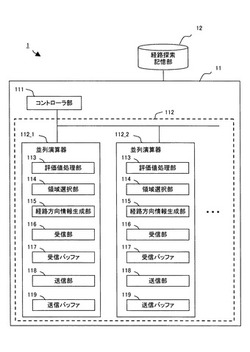
【課題】並列演算を用いて経路探索を行う際に、経路情報を効率的に取得すること。
【解決手段】本発明に係る経路探索装置1は、並列演算部112と、コントローラ部111と、を備える。並列演算部112は並列演算により領域の評価値を算出する。並列演算器112_nは、各領域の評価値に基づいて近傍に存在する領域から一の選択領域を選択する領域選択部114、自領域から選択領域への方向を示す経路方向情報を生成する経路方向情報生成部115、経路方向情報を受信する受信部116、選択領域の並列演算器112_nに経路方向情報を送信した後に、生成した経路方向情報を送信する送信部118を備える。コントローラ部111は、移動終点の並列演算器112_nから経路方向情報の送信を最初に開始させた後に、並列演算部112内で伝播した経路方向情報の系列を移動始点の並列演算器112_nから取得する。
(もっと読む)
ナビゲーション装置

【課題】原動機付自転車に特有の通行規制である二段階右折の案内をユーザに提供することができる「ナビゲーション装置」を提供すること。
【解決手段】
交通案内情報を少なくとも画像又は音声で出力する情報出力手段と、所定の車両が二段階右折をするように規定されている交差点に車両が到達したと判定したときに(S14)、二段階右折が必要である旨の案内を情報出力手段を介して行う(S15)制御手段とを有する。制御手段は、車両の種類に応じて二段階右折が必要である旨の案内の内容を変更する。
(もっと読む)
グリッドマップを利用した経路生成装置及び方法
【課題】 制限されたメモリサイズを用いてグリッドマップに基づいた経路を生成する装置及び方法を提供する。
【解決手段】 元のグリッドマップを縮小して生成される縮小マップに基づいて概略経路を生成する。その後、概略経路を元のグリッドマップにマッピングし、該マッピングされて拡大された経路を経路計算に利用される可用メモリサイズに基づいて複数個の区間に分割する。該分割された区間別に設定された出発点及び目標点に基づいて区間別詳細経路を生成する。
(もっと読む)
経路計画のためのシステムおよび方法
【課題】第2の物体の第2の運動経路に基づいて、経路プランナによって定義された第1の運動経路内の第1の物体の運動をマッピングする。
【解決手段】経路プランナを使用して第1の運動経路を作成し、第1の運動経路内の第1の物体の開始位置を初期化し、第1の運動経路の各セグメントの初期状態の値を決定し、経路プランナに対する現在のサンプル呼出し時間と経路プランナに対する最終サンプル呼出し時間との間の経過時間を計算する。計算された経過時間がサンプル期間よりも大きい又は小さい場合、第2の運動経路における第2の物体の現在の位置は計算された経過時間を利用して決定され、第1のセグメントの開始時間と現在のサンプル呼出し時間との間の複数のセグメントのうちの第1のセグメント内の満了時間が計算され、経路プランナから第1の運動経路を変化させる出力コマンドが生成される。
(もっと読む)
経路を選択する装置、方法およびプログラム
【課題】動環境でも到達しやすい経路を、より小さい計算コストで選択することができる経路選択装置を提供すること。
【解決手段】複数の経路候補の入力を受付ける受付部101と、受付けた経路候補それぞれに対して、経路候補上の点から近傍に存在する物体までの距離、および、物体の存在確率に基づいて評価値を算出する評価値算出部102と、算出された評価値をスタート地点からゴール地点まで積分して得られる移動コストを算出するコスト算出部103と、移動コストが最も小さい経路候補を最適な経路として選択する選択部106と、を備えた。
(もっと読む)
速度計測装置
【課題】他の移動体へ容易に転用でき、計測した移動体の走行速度から走行ルートにおける移動体の運行状態を特定することができる速度計測装置を提供する。
【解決手段】台車1に、速度検出器3と非接触式速度計4とパーソナルコンピュータ5とバッテリ6で構成する一体型の速度計測装置2を着脱自在に取り付ける。速度検出器3と非接触式速度計4で計測した台車1の走行速度データをパーソナルコンピュータ5に転送する。パーソナルコンピュータ5は、速度データを記録すると共に、走行時間で積分し算出した走行距離データを記録する。また、パーソナルコンピュータ5には、台車1の走行経路図のデータを予め記録しておく。そして、これらのデータに基づいて、台車1の運行状態、例えば、台車1の走行速度が“0”となっている運行停滞場所を特定する。
(もっと読む)
経路探索装置、経路探索方法及びプログラム
【課題】任意のマップに対して経路探索結果を短時間に得ること。
【解決手段】経路探索の対象となるマップを示すマップ情報を取得するステップ(S101)と、前記マップ情報が示すマップ上に複数の代表点を設定するステップ(S102〜S104)と、前記代表点間の経路及びその距離を演算するステップ(S105)を含み、代表点間の経路及び距離を演算するステップ(S105)では、並列処理可能であってそれぞれ前記代表点のうち一部が関連づけられる複数のプロセッサのそれぞれにより、該プロセッサに関連づけられる前記代表点から他の前記代表点への経路のうち少なくとも1つ及びその距離を並列に演算する。
(もっと読む)
車両用背景画像収集装置
【課題】車両における障害物検知を行なう際の基準となる背景画像を適切に収集することが可能な車両用背景画像収集装置を提供すること。
【解決手段】車両周辺を定期的に撮像する撮像手段(10)と、前記撮像手段が撮像した各撮像タイミング又はサンプリングされた各撮像タイミングについて、車両の移動径路が基準径路記憶手段に記憶された基準径路と乖離しているか否かを判定し、乖離していないと判定した場合に当該撮像タイミングで前記撮像手段により撮像された画像を背景画像として背景画像記憶手段(20)に記憶させる判定記憶制御手段(50)と、を備える車両用背景画像収集装置(1)。
(もっと読む)
携帯型経路案内装置
【課題】 個人の健康管理に必要な情報、特に消費カロリーを考慮した経路案内が行える携帯型経路案内装置の提供。
【解決手段】本発明の携帯型経路案内装置は、設定,入力された起点,終点,目標消費カロリーの情報に基づいて、記憶された地図情報により経路を探索し、探索した経路を表示する携帯型経路案内装置であって、地図情報を記憶する地図情報記憶手段と、自己位置を検出する自己位置検出手段と、個人の日常の健康管理に必要な情報を記憶する管理情報記憶手段と、前記地図情報記憶手段、自己位置検出手段および管理情報記憶手段から得られる情報に基づいて、推奨経路を探索する経路探索手段と、表示部とを備え、探索された前記経路を表示に表示するとともに、消費カロリーをカウントダウンまたはカウントアップして表示することを特徴とする。
(もっと読む)
作業車両
【課題】暗夜や積雪時などで障害物が視認できないときに車体の走行位置をGPS受信装置で受信して、障害物判断処理を実行する制御手段を具備した作業車両を提供する。
【解決手段】地図情報を格納するデータベースD1と、前記地図情報に基づく作業機の位置検出手段及び位置表示手段とを有する作業車両において、作業車両の走行時に、現在の走行位置と、データベースD1に格納された障害物地図情報と比較し、障害物が近づくと警報を発する。また、前記警報時に、障害物の種類と位置を表示する。
(もっと読む)
方向提示システム、及びこれを適用した電動車椅子、杖、ゲーム用コントローラ
【課題】簡易な構造でユーザの触覚を刺激して、方向指示情報に基づいた方向提示を確実に実行できる方向提示システムを提案する。
【解決手段】前後左右方向及び斜め方向にスライド可能な移動部を有する電磁駆動アクチュエータATと、外部から提供される方向指示情報GPSに基づいて、前記移動部のスライド方向を制御する駆動制御手段DC−Pとを備えている方向提示システムである。本発明によると、駆動制御手段が外部から提供される方向指示情報に基づいて電磁駆動アクチュエータの移動部をスライド制御するので、この移動部によってユーザの指、手、肘などを一定の長さを持って触角刺激することができる。よって、視覚や聴覚でなく、ユーザの触覚刺激により方向を提示できるので、仮にユーザが視覚や聴覚に障害のある者であっても提示したい方向を確実に伝達できる。
(もっと読む)
慣性航法システムを増補するシステムおよび方法
【課題】より高い頻度で、GPS信号またはレーザ信号の一方または両方がブロックされる可能性がある期間中に、正確な位置情報およびエレベーション情報を生成できる位置監視システムを提供すること。
【解決手段】慣性航法システム(INS)を増補するシステムおよび方法は、作業機に関連する位置情報をINSから出力することと、作業機の位置情報と作業機の所望の位置との比較に基づいて作業機を調整することとを含む。INSは、INSの固有の特性によって引き起こされる可能性がある位置情報のドリフトを訂正するために、ファンレーザ、オートマティックトータルステーション(ATS)、GNSS受信器、または地上ベース無線位置決めシステムなどの1つまたは複数の位置決め(または測定)デバイスからの位置情報の関数としてカルマンフィルタによって生成される誤差推定値を使用して、周期的に再初期化される。
(もっと読む)
買物経路誘導システム
【課題】 ショッピングセンタなどにおいて、ユーザを必要な場所まで誘導するカートロボットを用いたシステムを提供する。
【解決手段】
ユーザの買物経路を誘導するシステムであって、管理サーバは、商品棚位置情報、店舗内のカメラからの混雑情報、およびカートロボットの経路情報を格納し、各情報をカートロボットに送信し、カートロボットは、商品棚位置情報をもとに目的とする棚位置までの距離を最短とする経路計画を生成し、当該経路にしたがってカートを移動させ、曲がり角を検出したときに、ステアリング操作が自動的に行われることを特徴とする。
(もっと読む)
移動体位置検出装置
【課題】走行経路の地図データが十分に高分解能であることを利用して、移動体)の走行経路)に対する位置関係を高分解能で検出できる移動体位置検出装置の実現。
【解決手段】移動体1に設けられ、移動経路10の端11,12を検出する移動端検出部2と、移動体の移動速度を検出する速度検出部3と、移動体の移動方向を検出する方位検出部4と、地図データを記憶した地図データ記憶部7と、検出した移動経路の端、移動速度及び移動方向、及び地図データから、移動体1の移動経路に対する位置関係を算出する処理部5と、を備える。
(もっと読む)
自己位置推定装置
【課題】 ランドマークが低い位置に設定されていたり、検出されるランドマークの数が少なかったりする場合でも、高い精度で自己位置を推定することができる自己推定装置を提供する。
【解決手段】 自己位置推定装置1は、ステレオカメラ2と自己位置推定ECU3を備える。自己位置推定ECU3は、ステレオカメラ2で撮影された画像からランドマークを抽出するとともに、自己位置からランドマークまでの距離を算出する。この抽出されたランドマークおよびランドマークまでの距離に基づいて、自己が存在可能である自己存在可能範囲を推定する。このとき、自己位置からランドマークまでの距離が短い場合には、自己位置からランドマークまでの距離が長い場合と比較して、自己存在可能範囲を狭く推定する。
(もっと読む)
移動体のキャリブレーション装置およびこれを搭載した移動体並びにキャリブレーション方法
【課題】簡単な構成の装置で移動体の運動学パラメターを精度よく求めることができ、かつキャリブレーション作業に要する手間と空間を大幅に削減する移動体のキャリブレーション装置と方法および自己キャリブレーション機能を有する移動体を提供する。
【解決手段】モータ回転速度計測部と、移動体の回転速度計測部と、車輪を駆動するモータの回転速度指令を出力するモータ回転速度指令部と、前記モータ回転速度計測部の出力値と前記移動体の回転速度計測部の出力値とから前記移動体の運動学パラメターを得る演算処理部と、を備え、前記モータ回転速度指令部はキャリブレーションにあたって正負対称の定常波指令を一定期間出力するようにした。
(もっと読む)
監視方法
【目的】監視対象となる人や物が異常な動きをした時に、その人や物の移動速度や移動範囲によらずに、その異常を判定して監視者に知らせることができる監視方法を、提供する。
【解決手段】監視サーバ2は、発信者端末が連続的に移動する時間が事前に登録された継続移動時間を超えたときに、受信者端末3へアラーム信号を送信する。また、監視サーバ2は、発信者端末が移動した距離が事前に登録されたTotal移動距離を超えたときに、受信者端末3へアラーム信号を送信する。
(もっと読む)
経路探索装置
【課題】施設の出入口等の位置を考慮した経路探索を実現する技術を提供する。
【解決手段】通常のノードとリンクに加え、施設内にもノードとリンクを持たせる。また、施設の中と外とを結ぶ出入口にもノードを持たせる。出発地が施設外でかつ、目的地が施設内である経路探索において、これらのノードおよびリンクをシームレスに用いることにより、最適な出入口を経由する経路を探索することが可能となる。
(もっと読む)
利用者案内システム
【解決手段】情報信号を電波として送信する送信機と、その情報信号にかかる電波を受信して利用者に対し音声等として伝達する受信機とを備え、その情報信号にかかる電波を送信機から、利用者が通る通路に沿って設けた信号誘導体1を通して受信機へ伝送する。受信機の受信アンテナは利用者が使用する杖4または車椅子5に取り付けられている。信号誘導体1は、磁性体であるフェライトを含有し、利用者誘導目的場所を中心とする受信可能範囲で利用者が通る通路において踏み歩く面に敷設されている。受信機を携帯した視覚障害者等の利用者が受信可能範囲に近付いてその受信可能範囲に侵入すると、送信機と受信機とが信号誘導体1を介して互いに結合されて各種利用者誘導目的場所への案内が開始される。
【効果】視覚障害者等の利用者は、その案内に従って誘導されさえすれば、利用者誘導目的場所に関する各種情報も得ながらその場所へ確実に到着する。
(もっと読む)
21 - 40 / 51
[ Back to top ]