
Fターム[2F129BB21]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 相対位置測位 (18,278) | 方位センサ (3,052)
Fターム[2F129BB21]に分類される特許
2,321 - 2,340 / 3,052
情報処理装置、ナビゲーション装置、および地図データ表示方法
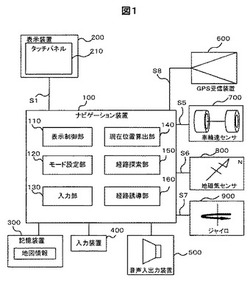
【課題】地図を表示するシステムにおいて、簡単な操作で表示している地図の縮尺率の変更することを実現する。
【解決手段】タッチパネル210を備えた表示装置200と、ナビゲーション装置100とを備えたシステムに、表示装置200に地図を表示させる表示制御部110と、表示中の地図の縮尺率を上げて詳細な地図の表示に変更する第1モード、および縮尺率を下げて広域な地図の表示に変更する第2モードのいずれかのモードに設定するモード設定部120と、設ける。表示制御部110は、タッチパネル210からの信号を受けると、モード設定部120から設定されているモードを取得し、取得したモードが第1モードの場合、表示中の地図よりも縮尺率の高い地図を表示装置200に表示し、取得したモードが第2モードの場合に表示中の地図よりも縮尺率の低い地図を表示装置200に表示する。
(もっと読む)
車両用ナビゲーションシステム

【課題】故障診断データをより一層簡単に収集することができる車両用ナビゲーションシステムを提供すること。
【解決手段】ナビゲーションシステムは、車速センサ断線検出、バックライト高温検出、ジャイロ異常検出、チェックサムなどのセルフダイアグを実行する(ステップS10)。そして、制御回路8は、これらのセルフダイアグにて異常があるか否かを判定して、異常があると判定した場合は、ナビゲーションシステムに異常が発生した時点での状況を示すデータを収集する(ステップS11、ステップS12)。次に、制御回路8は、異常信号とステップS12で収集したデータとによってダイアグデータを生成して、このダイアグデータをコード化してQRコードなどの二次元コードに変換する(ステップS13、ステップS14)。さらに、制御回路8は、ダイアグデータを変換したQRコードを表示装置10に表示する(ステップS15)。
(もっと読む)
ナビゲーション装置
【課題】走行案内に不要な区画の地図データを本体内の記憶手段に記憶させないようにする。
【解決手段】地図データ読出手段が読み出した地図データに道路リンクデータが含まれるか否かを判定し(S104)、地図データ読出手段が読み出した地図データに道路リンクデータが含まれると判定された場合、地図データ読取装置が読み出した地図データを本体内の外部メモリ17に記憶させる(S116)。
(もっと読む)
情報取得装置およびナビゲーション装置
【課題】第1の待ち合わせ者が、待ち合わせ相手である第2の待ち合わせ者からの通知がなくても、相手が待ち合わせ時間に遅れることを知ることができる情報取得装置を提供する。
【解決手段】待ち合わせ相手が乗っている交通機関の移動状況情報を取得し(S40)、その移動状況情報に基づいて相手の交通機関に遅れが生じているか否かを判断する(S41)。そして、遅れが生じている場合には、その遅れに基づいて待ち合わせ場所への到着予想時刻を決定し(S42)、その到着予想時刻と予め設定されている待ち合わせ時間とを比較して、待ち合わせ相手が待ち合わせ時間に間に合わないか否かを判断する(S43)。待ち合わせ時間に間に合わないと判断した場合には、S42で決定した到着予想時刻に待ち合わせ時間を変更し(S44)、その変更した待ち合わせ時間を待ち合わせ相手を迎えに行く運転者および待ち合わせ相手に通知する(S45、S46)。
(もっと読む)
ナビゲーション装置
【課題】ソフトウェアの処理を複雑化することなく、案内経路を設定することができるナビゲーション装置を提供する。
【解決手段】コスト値が各々異なる複数の道路データを記憶した地図DB群6を備え、コスト計算を行う際に用いる道路データをユーザに選択させ、その選択した道路データに切り替えてコスト計算を行う。
(もっと読む)
車両用報知装置
【課題】外部からの情報を受けることなく、防音対策がなされた区間を走行中であることをユーザに報知できるようにする。
【解決手段】車両に備えられた位置検出器10によって検出された車両の現在位置と車両に備えられた地図データ入力器15を介して記憶媒体から読み出された地図データに含まれる防音区間情報に基づいて車両が防音区間を走行中であるか否かを判定し(S104)、車両が防音区間を走行中であることを報知する(S114)。
(もっと読む)
ナビゲーション装置
【課題】車両の旋回中であっても、より確からしい道路リンク上に車両の現在位置を表示することができるナビゲーション装置20を提供する。
【解決手段】本発明のナビゲーション装置20は、旋回中引き込み処理によって新たな候補点が算出された場合に、当該新たな候補点と、前回表示すべき候補点として出力された候補点からデッドレコニングされた相対位置とが第1の距離未満ならば、当該新たな候補点を車両の現在位置として出力する。
(もっと読む)
移動体用地図情報更新装置、ナビゲーション装置および移動体用地図情報更新システム
【課題】目的地や経由地までの本来の最適な経路を素早く設定できるようにする。
【解決手段】制御回路が存在可能領域から外れたことが決定されると(S1)、当該地図ブロックの最新データが存在するときに(S3:YES)、サーバからその地図ブロックの地図情報を取得して更新し(S4)、更新された地図ブロックの周囲の地図ブロックBについて更新要と判定された地図ブロックの地図情報を順次更新する(S5〜S7)。
(もっと読む)
車両走行支援装置
【課題】目視困難な領域の複数車両の走行位置関係、これら車両の速度減速、車線変更、右左折などの報知状況、道路形状、信号、道路標識や歩行者、自転車を含む道路状況などの情報を正確に把握し、自車の安全な走行情報を提示できる車両走行支援装置の提供。
【解決手段】本発明の車両走行支援装置は、車両走行支援情報を外部から受信する通信部211と、車両走行支援情報から他車両の走行位置を解析する車両走行位置解析部213と、車両走行支援情報から他車両の報知状況を解析する車両報知情報解析部214と、他車両の走行位置および他車両の報知情報を用いて他車両の移動を予測する移動予測部216と、移動予測部216で予測した他車両の移動予測情報を用いて自車両の走行情報を生成する走行情報生成部217とを備えたことにより、自車の安全な追い越し、車線変更、右左折などの走行支援が可能となる。
(もっと読む)
測位端末
【課題】測位端末において、測位結果の表示にかかる時間や通信コストを削減し、異なる測位方式であっても単一の端末で測位可能とする。
【解決手段】測位端末1は、自律測位部11、無線測位部12、推測航法部13、位置補正部14、測位演算部15、位置情報表示部16および測位ソフトウェア記憶部18を備える。自律測位部11が測位端末1の所持者の歩行動作に応じて慣性データを出力し、推測航法部13がその慣性データから位置情報を推定する。一方、無線測位部12および測位演算部15は、測位ソフトウェア記憶部18からロードされた測位ソフトウェアをCPUが実行することによって動作し、無線信号の周波数、変調方式、測位方式に応じて無線信号の受信、復調、測位演算などを行う。位置補正部14は、推測航法部13および測位演算部15から入力した位置などから位置情報を補正する。そして、位置情報表示部16が、位置情報を表示する。
(もっと読む)
データ処理装置
【課題】ディスプレイが画像をスクロール表示している場合に、ユーザはその操作感覚に応じてスクロール速度を変更できなかった。
【解決手段】HDD12には、座標データから求まる接触方向vtとスクロール方向vsとが同一方向または略同一方向であれば、スクロール速度Vsを加速する制御部としてCPU14を機能させるための制御プログラム、加速度αと接触時間Tとの関係を示す第1の加速度テーブル、加速度αと接触速度Vtとの関係を示す第2の加速度テーブルならびにスクロール方向vsを定義するスクロール方向テーブルおよびスクロール方向vsに対して許容されるズレの範囲(ズレ境界線Dnn)を示すズレ境界線テーブルが記憶されている。
(もっと読む)
経路案内システム及び経路案内方法
【課題】確実に探索経路に沿って車両を走行させることができるようにする。
【解決手段】自車の現在地を自車位置として検出する現在地検出部と、自車位置に基づいて目的地までの探索経路を探索する経路探索処理手段と、探索経路に基づいて案内交差点を設定する案内交差点設定処理手段と、案内交差点についての経路案内を行うための経路案内地点を設定する経路案内地点設定処理手段と、経路案内領域が自車位置から案内交差点までの所定の交差点と重なるかどうかを判断する変更条件判定処理手段と、経路案内領域が所定の交差点と重なる場合に、経路案内領域を変更する領域設定処理手段とを有する。経路案内が行われている間に交差点を車両が走行することがなくなるので、経路案内に従って確実に探索経路に沿って車両を走行させることができる。
(もっと読む)
ナビゲーション装置
【課題】自車が走行する際の通過予定時刻に交通障害が発生する地点を含むエリアを周囲のエリアより下位レベルの地図データに基づいて経路の探索を行うことによって、交通障害を回避した適切な経路を設定することを可能としたナビゲーション装置を提供する。
【解決手段】自車が走行する際の通過予定時刻において交通障害の一つである渋滞が発生する渋滞区間をタイムスライス計算を用いて検出し(S4)、その渋滞区間を含むエリアを、第2経路探索処理で周囲のエリアより道路網の情報量の多い下位レベルの地図データに基づいて探索する(S11)ように構成する。
(もっと読む)
ナビゲーション装置
【課題】 交差点などで車両の運転者の視点を考慮し、現実に近い経路案内を行う。
【解決手段】 道路51,52を立体的に表示した交差点53付近の案内経路54を、道路51,52の表面から高さをもたせて表示する。さらには影55を付加して、高さが判りやすくなるように表示する。道路51と道路52の一方または両方が高架道路であるときには、案内経路54の高さを一層高く見えるように表示する。
(もっと読む)
経路案内システム及び経路案内方法
【課題】走行レーンを確実に特定することができるようにする。
【解決手段】自車の現在地を自車位置として検出する現在地検出部と、自車が走行している道路上の自車位置より前方の進行方向のいずれかのレーンに地物が存在するかどうかを判断する地物判定処理手段と、進行方向のいずれかのレーンに地物が存在する場合、地物が存在するレーンを誘導レーンとして設定する設定処理手段と、誘導レーンに基づいて走行レーンを特定するレーン特定処理手段とを有する。進行方向のいずれかのレーンに地物が存在する場合、地物が存在するレーンが誘導レーンとして設定され、誘導レーンに基づいて走行レーンが特定されるので、走行レーンを確実に特定することができる。
(もっと読む)
地図表示装置、ナビゲーションシステム及び地図表示方法
【課題】その土地の地理に詳しくないユーザでも判りやすい方面表示看板を表示する技術を提供する。
【解決手段】ナビゲーションシステムは、記憶装置に、地名及びその地名の位置を含む地名情報と、道路の行き先の地名を含む方面表示看板に関する情報等を格納している。地名情報は、例えば、経路探索時に設定された目的地、経由地、ユーザにより登録指示された位置等である。ナビゲーションシステムは、位置情報に、方面表示看板に含まれる道路により近づくことのできる位置が含まれている場合、その方面表示看板に含まれる道路の行き先の地名を、位置情報に含まれる地名に変更する。ナビゲーションシステムは、このように変更した方面表示看板を表示等する。
(もっと読む)
経路案内システム及び経路案内方法
【課題】車両を確実にレーン案内に従って走行させることができ、運転者が過剰なレーン案内を煩わしく感じることがないようにする。
【解決手段】自車の現在地を自車位置として検出する現在地検出部と、自車位置に基づいて目的地までの探索経路を探索する経路探索処理手段と、探索経路に基づいて道路において推奨されるレーンを設定する推奨レーン設定処理手段と、自車を推奨レーンに誘導するためにレーン案内を行うレーン案内処理手段と、自車位置及び推奨レーンに基づいて、車両の動向を判定する車両動向判定処理手段とを有する。レーン案内処理手段は、車両の動向に基づいて、レーン案内を中止する。自車位置及び推奨レーンに基づいて、車両の動向が判定され、車両の動向に基づいてレーン案内が中止されるので、運転者が過剰なレーン案内を煩わしく感じることがなくなる。
(もっと読む)
カーナビゲーションシステム
【課題】ルートガイダンス中に所定の案内ポイントに近付いたことを、判りやすくドライバに知らせることができ、しかも、そのための構成を比較的簡単に済ませる。
【解決手段】運転席の左側部に、回動操作及び押圧操作が可能な操作部19を有する遠隔操作装置2を設ける。ケース18内に、左側、右側を振動させる振動子23,24を設ける。遠隔操作装置2の制御部17にカーナビゲーション装置1を接続する。カーナビゲーション装置1は、ルートガイダンスの実行時に、自車位置が所定の案内ポイントに近付いたときに、制御部17に対して案内信号(左折指示、右折指示)を出力する。制御部17は、案内信号が入力されたときに、各振動子23,24を駆動制御し、遠隔操作装置2を振動させる。
(もっと読む)
方位センサの補正係数演算装置及び演算プログラム
【課題】GPS情報を基準とし、方位センサからの方位センサ情報に基づく方位変化量及びGPS情報に基づく方位変化量に関する情報の取得を適切に行い、前記方位センサ情報を補正するための補正係数を適切に演算することが可能な方位センサの補正係数演算装置等を提供する。
【解決手段】近傍領域arA内と後方領域arB内の双方で直進し、近傍領域arAと後方領域arBとの間で方位変更があった場合に、近傍領域arA内での進行方位と後方領域arB内での進行方位との間のGPS情報に基づくGPS方位変化量ang−GPSと、方位センサ情報に基づくセンサ方位変化量ang−SENとの差異に基づいて、方位センサ情報を補正するための補正係数を演算する。
(もっと読む)
車両用ナビゲーション装置
【課題】車両の方向転換(Uターン)が行われたか否かを精度良く判定して、方向転換が行われた場合には、車両が走行する道路上に車両マークを即座に表示すること。
【解決手段】車両がUターンを行った場合には、そのUターン開始前の進行方向とUターン終了後の進行方向とは、結果としてほぼ逆方向となる。従って、車両が進行方向の変化を開始した進行方向開始点を基準として不感帯エリアを設定し、その不感帯エリア進入位置におけるエリア進入方向及び退出位置におけるエリア退出進行方向に基づいて、車両がUターンしたか否かを簡便かつ精度良く判定することができる。
(もっと読む)
2,321 - 2,340 / 3,052
[ Back to top ]