
Fターム[2F129BB21]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 相対位置測位 (18,278) | 方位センサ (3,052)
Fターム[2F129BB21]に分類される特許
2,281 - 2,300 / 3,052
車車間通信システム
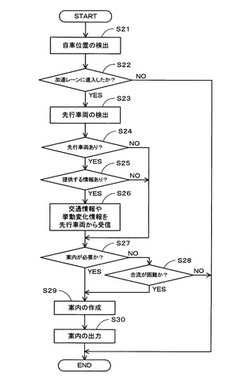
【課題】自車両と分岐点を同一方向に進む先行車両から挙動変化に関する挙動変化情報を取得し、取得した挙動変化情報に基づいて走行を案内することにより、分岐点を走行する後続車両に対して有益な情報を選別して付与することを可能にした車車間通信システムを提供する。
【解決手段】高速道路等の本線に合流する為の加速レーンに進入した際に、加速レーンから本線への合流を行う分岐点を自車と同一方向に進む先行車両を検出し(S23)、先行車両から取得した交通情報や挙動変化情報に基づいて後続車両の分岐点における走行を補助する案内を作成し(S29)、作成した案内を液晶ディスプレイ10やスピーカ11により出力する(S30)ように構成する。
(もっと読む)
地図表示装置

【課題】道路と渋滞特定情報が重ねて表示される場合に道路を優先して表示することにより、道路と道路の渋滞状況を示す渋滞特定情報とを同時に表示する場合であっても道路を見易く表示することを可能にした地図表示装置を提供する。
【解決手段】液晶ディスプレイ15に対して道路を含む地図画像を表示する際であって、特に渋滞特定ライン71等の渋滞情報を示す画像と高規格道路73の画像とが重ねて表示されてしまう1/8万以下の縮尺で地図を表示する場合(S8:YES)には、高規格道路73を渋滞特定ライン71や渋滞履歴特定ライン72より優先して表示する第1描画順位を描画順位として設定し(S10)、画像の描画を行う(S11)ように構成する。
(もっと読む)
経路案内システム及び経路案内方法
【課題】案内交差点より手前側にバスレーンがある場合に、適切なレーン案内を行うことができるようにする。
【解決手段】自車の現在地を自車位置として検出する現在地検出部と、自車位置に基づいて目的地までの探索経路を探索する経路探索処理手段と、道路におけるレーン情報を取得するレーン情報取得手段と、レーン情報に基づいて、探索経路上にバスレーンがあるかどうかを判断するバスレーン判定処理手段と、レーン情報に基づいて、現在の時刻が規制時間帯であるかどうかを判断する規制内容判定処理手段と、探索経路上にバスレーンがあり、現在の時刻が規制時間帯である場合に、探索経路に基づいて、走行するのが推奨される推奨レーンを補正して設定する推奨レーン設定処理手段とを有する。自車を走行させることができないにもかかわらず、バスレーンが推奨レーンとされることがなくなる。
(もっと読む)
車両情報提供システム
【課題】所定の目的地へと走行している車両のみから情報を情報センタへと送信することにより、車両と情報センタ間の通信回数を減少させ、通信処理に係る負担を減少させた車両情報提供システムを提供する。
【解決手段】プローブカー2において目的地の設定又は変更が行われた後に、プローブカー2で設定された目的地の情報をプローブ情報センタ3へと送信し(S2)、プローブ情報センタ3は送信されたプローブカー2の目的地と同一の目的地を設定する端末車両4があると判定された場合(S102:YES)に、当該プローブカー2に対してプローブ情報の送信指示を送信する(S103)とともに、送信指示が送信されたプローブカー2は送信された送信指示に従ってプローブ情報をプローブ情報センタ3に対して送信する(S5)ように構成する。
(もっと読む)
走行リンク特定システム
【課題】車両の走行した2以上のリンクの間を接続するリンクの組合せに基づいて走行リンクを特定することにより、取得した車両の位置情報からの走行経路の正確な特定を可能とした走行リンク特定システムを提供する。
【解決手段】プローブカー2から送信されたプローブ情報の内、特にプローブカー2の2点の位置座標からプローブカー2の走行したリンクを検出し、検出されたリンクの間を接続するリンクの組合せが一の組合せに特定できる場合(S13:YES)に、特定されたリンクの組合せを走行リンクに特定する(S18)ように構成する。
(もっと読む)
情報提供装置および情報提供方法
【課題】移動履歴を必要とせず、かつ、交通流計測地点を通過する必要もなく、移動体の移動先を予測して情報を提供する情報提供装置を提供する。
【解決手段】交通量を検出する地点である複数の交通量検出地における交通量の向き等を蓄積する交通量検出地蓄積部102と、移動体の現在位置を取得する現在地取得部101と、取得された現在位置から交通量検出地への向きを算出する向き算出部104と、交通量検出地蓄積部102に蓄積されている交通量検出地の一部等を移動先候補として選択し、選択した移動先候補の交通量検出地について、向き算出部104で算出された向きと、当該交通量検出地における交通量の向きとの方向差を算出し、その方向差が閾値の範囲内にある交通量検出地を特定し、それを移動体の移動先として予測する移動先予測部105と、予測された移動先に関する情報を提示する情報提供部106とを備える。
(もっと読む)
経路案内システム及び経路案内方法
【課題】走行レーンを特定することができない場合でも、適切なレーン案内を行うことができるようにする。
【解決手段】自車の現在地を自車位置として検出する現在地検出部と、自車位置に基づいて目的地までの探索経路を探索する経路探索処理手段と、探索経路に基づいて、推奨レーンを設定する推奨レーン設定処理手段と、車両通行帯境界線の画像データに基づいて自車が推奨レーンにいるかどうかを推定する自車位置推定処理手段と、自車が推奨レーンにいるかどうかの推定結果に基づいて、自車が走行しているレーンを走行レーンとして想定する走行レーン想定処理手段と、想定された走行レーンに基づいてレーン案内を行うレーン案内処理手段とを有する。自車が推奨レーンにいるかどうかの推定結果に基づいて走行レーンが想定されるので、適切なレーン案内を行うことができる。
(もっと読む)
ナビゲーション装置
【課題】誘導経路上の渋滞がどのような交通規制によって発生した渋滞なのかをドライバに分かり易く案内することが可能なナビゲーション装置を提供する。
【解決手段】、自車位置から所定距離の範囲内に交通規制情報24があり、且つ、交通規制情報24が存在する規制リンクから始まる渋滞情報23がある場合には、この渋滞情報23を構成する渋滞リンクが全て抽出される(S2〜S4)。そして、この抽出した渋滞リンク内に誘導経路上の渋滞リンクがある場合には、CPU41は、各渋滞リンクに対応する交通規制情報24とこの交通規制情報24から始まる渋滞情報23とを液晶ディスプレイ15の地図上に識別可能に表示すると共に、誘導経路上にある渋滞をこの交通規制情報24から始まる渋滞情報23としてスピーカ16を介して音声案内する(S5〜S7)。
(もっと読む)
自位置認識システム
【課題】他車の有する自位置に関する情報に基づいて、自位置を認識するシステムにおいて、位置精度が高く、認識される自位置の確からしさを高く維持できる自位置認識システムを得る。
【解決手段】各車両に、自位置の確からしさの指標である自信度を演算する自信度演算手段43bを備え、送信車両から受信車両に、送信車両の自位置及び自信度を送信可能に構成するとともに、受信車両に対する送信車両の相対位置関係を検出する位置関係検出手段10を備え、送られてくる送信車両の自信度と、受信車両が認識している自信度とを比較する自信度比較手段44を備え、送信車両の自信度が、受信車両の自信度より高い場合に、送信車両の自位置及び相対位置関係に基づいて自位置の補正を行う。
(もっと読む)
経路案内システム及び経路案内方法
【課題】車両が車両通行帯境界線を跨(また)いで走行している場合、適切な経路案内を行うことができるようにする。
【解決手段】自車の現在地を自車位置として検出する現在地検出部と、自車位置に基づいて目的地までの探索経路を探索する経路探索処理手段と、探索経路に基づいて、走行するのが推奨される推奨レーンを設定する推奨レーン設定処理手段と、二つのレーンを跨いでいるかどうかを判断する跨ぎ判定処理手段と、二つのレーンを跨いでいるときに、自車の走行状況を判定する車両走行状況判定処理手段と、推奨レーン及び自車の走行状況に応じてレーン案内を行うレーン案内処理手段とを有する。二つのレーンを跨いでいる場合、自車の走行状況を判定し、推奨レーン及び自車の走行状況に応じてレーン案内を行うようになっているので、適切なレーン案内を行うことができる。
(もっと読む)
車両制御装置
【課題】ノーマル走行条件で到達可能な給油所が残り1カ所になった場合でも、ドライバに到達可能な複数の給油所を提示することが可能な車両制御装置を提供する。
【解決手段】ノーマル走行条件で走行した場合に到達可能な給油所(第1供給所)が残り1カ所になった場合には、ガソリンの単位走行距離当たりの消費量が通常消費量より少ない低消費走行条件で走行した場合に到達可能な給油所(第2供給所)を検索して、各給油所を液晶ディスプレイ15の地図上に表示する(S1〜S7)。そして、操作部14を介して低消費走行条件で走行した場合に到達可能な給油所(第2供給所)が選択された場合には、車両2をこの選択された給油所(第2供給所)に対応する低消費走行条件で走行するように制御すると共に、この選択された給油所(第2供給所)への経路を探索して案内する(S8〜S13)。
(もっと読む)
経路案内システム及び経路案内方法
【課題】リバーシブルレーンが存在する場合に、適切なレーン案内を行うことができるようにする。
【解決手段】現在地検出部と、経路探索処理手段と、道路におけるレーン情報を取得するレーン情報取得処理手段と、探索経路上にリバーシブルレーンがあるかどうかを判断するリバーシブルレーン判定処理手段と、リバーシブルレーンを通過可能であるかどうかを判断する規制判定処理手段と、走行するのが推奨される推奨レーンを補正して設定する推奨レーン設定処理手段とを有する。リバーシブルレーンを通過可能でない場合、推奨レーンが補正されるので、自車を走行させることができないにもかかわらず、リバーシブルレーンが推奨レーンとされることがなくなる。自車が走行不能なレーンに誘導されることがなくなり、適切なレーン案内を行うことができる。
(もっと読む)
車両間情報通信システム
【課題】地物に対してナビゲーション情報或は走行制御情報の生成を実行しようとする車両間情報通信システムにおいて、自車が検出することができる限界を超えて、正確且つ適切な情報を生成することができる車両間情報通信システムを得る。
【解決手段】送信車両Coが、走行路に沿って存在する地物Xを認識する地物認識手段を備えるとともに、認識された認識地物Xに関連の情報である地物関連情報を受信車両に送信可能に構成され、送信車両Coと受信車両Ciとの車両位置関係を検出する位置関係検出手段を設け、受信車両Ciで、送られてくる地物関連情報及び車両位置関係に基づいて、受信車両からみた認識地物Xを対象とするナビゲーション情報若しくは走行制御情報を生成する。
(もっと読む)
自車位置判定装置
【課題】自車位置の判定を高精度に行うことができ、ひいては、ミスマッチングを防止してナビゲーションの際に自車を目的地まで適切に案内することができる「自車位置判定装置」を提供すること。
【解決手段】自車位置の判定を行う自車位置判定装置14であって、捕捉されたGPS衛星の個数が所定数以下の場合に、前記自車位置の判定として自車が屋内に存在する旨の判定である屋内判定を行う屋内判定手段28を備えたこと。
(もっと読む)
経路案内システム及び経路案内方法
【課題】車両を円滑に走行させることができるようにする。
【解決手段】自車の現在地を自車位置として検出する現在地検出部と、前記自車位置に基づいて目的地までの探索経路を探索する経路探索処理手段と、前記探索経路に基づいて、走行するのが推奨される推奨レーンを設定する推奨レーン設定処理手段と、自車が走行しているレーンを特定する走行レーン特定処理手段と、推奨レーン及び走行レーンに基づいて、レーン単位の案内を行うレーン案内処理手段と、レーン案内に従って、自車が推奨レーンに進入したかどうかを判断する推奨レーン進入判定処理手段と、自車が推奨レーンに進入したかどうかによって、異なる経路案内を行う経路案内処理手段とを有する。レーン案内が開始された後、車両の走行状態に対応させて経路案内を行うことができる。
(もっと読む)
ナビゲーション装置
【課題】逸脱地点を記録して、操縦者の意思に沿ったルート案内を行うことのできるナビゲーション装置を提供することを目的とする。
【解決手段】本発明の構成によれば、設定されたルートを外れた地点を逸脱地点として記録し、その記録した逸脱地点から設定ルート上もしくは目的地点まで実際に走行した設定ルート外の移動軌跡を通過した回数に関する情報を記録する。そして、その通過した回数に関する情報に基づいて、その移動軌跡をルートの検索対象に加えてルート検索する。これにより、操縦者の意思に沿ったルート案内を行う。
(もっと読む)
ナビゲーションシステム
【課題】自車位置の前方にある休憩施設で休憩を行った場合の該休憩施設から更に前方の渋滞状況の変化をタイミングよくユーザに認知させることが可能なナビゲーションシステムを提供する。
【解決手段】ナビゲーション装置2のCPU41は、受信した所定時刻毎の渋滞予測情報と現況の道路渋滞情報に基づいて、休憩施設49で各所定時間の休憩(例えば、30分間や60分間の休憩である。)をした場合の該休憩施設49から目的地までの経路上の渋滞の増減傾向が所定基準以上の場合には、休憩施設49に進入する前に該休憩施設49で各所定時間の休憩をした場合の渋滞区間の所要時間の増減等をスピーカ26を介して音声報知し、該休憩施設49に進入後、この渋滞予測情報の詳細表示画面55を液晶ディスプレイ25に表示してユーザに報知する(S8〜S11)。
(もっと読む)
自位置認識システム
【課題】走行レーンの認識といった走行路巾方向の自位置認識に関して、精度が高く、信頼性の高い自位置認識を行うことができる自位置認識システムを得る。
【解決手段】各車両に、自位置の確からしさの指標である自信度を求める自信度演算手段43bを備え、送信車両から受信車両に、送信車両の自位置及び自信度が送信するとともに、受信車両と送信車両との相対位置関係を確認する位置関係検出手段10・11を備え、送信車両の自信度と、受信車両の自信度とを比較する自信度比較手段44を備え、送信車両の自信度が、受信車両の自信度より高い場合に、送信車両の自位置及び相対位置関係に基づいて自位置の補正を行う。
(もっと読む)
固体の移動を推定するための方法
本発明は、3つの変数ベクトルによって定義される外乱を生成しうる媒体における固体移動体による方法であり、移動は、6つの変数ベクトルによって定義され、固体は、少なくとも3つの感度軸を有する加速度を感知する少なくとも1つのセンサと、少なくとも3つの感度軸を有する磁界を感知する少なくとも1つのセンサと、を備える。固体の移動を推定するための本発明の方法は、6つの変数の移動ベクトルと、3つの変数の外乱ベクトルからなる9つの変数ベクトル(Λ)を計算するステップ(B6)と、9つの変数ベクトルを推定されることになっている最大で5つの変数を有するベクトルに変換することができる9つの変数ベクトル(Λ)に重み付けを行うステップ(B6)と、を含む。 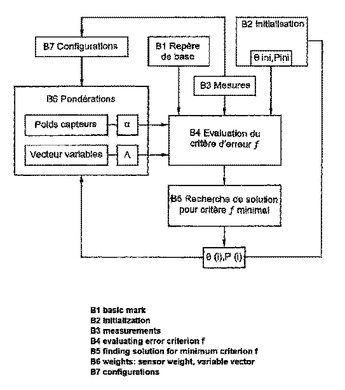 (もっと読む)
(もっと読む)
カーナビゲーション装置
【課題】 表示領域を狭くすることなく、2次元地図画像と3次元地図画像との両方を表示することができ、自車の現在位置を一目で容易に把握することが可能なカーナビゲーション装置を提供すること。
【解決手段】 2次元地図画像及び3次元地図画像を表示する表示部を備えたカーナビゲーション装置であって、自車の現在位置を検出する自車位置検出手段と、自車位置検出手段が検出した自車位置を示す位置データと、予め記憶された又は外部から受信した地図情報とに基づいて、地図画像を表示部に表示する制御を行う表示制御手段とを備え、表示制御手段は、表示部に3次元地図画像を表示するとともに、表示部の上部における、3次元地図画像上の構造物が表示されていない部分に、2次元地図画像を表示する制御を行うことを特徴とするカーナビゲーション装置。
(もっと読む)
2,281 - 2,300 / 3,052
[ Back to top ]