
Fターム[2F129BB49]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正方法 (4,075) | マップマッチング (2,282)
Fターム[2F129BB49]の下位に属するFターム
パターンマッチング (131)
投影法 (42)
上下判定 (41)
車線・道路幅データの利用 (62)
Fターム[2F129BB49]に分類される特許
1,981 - 2,000 / 2,006
高さ方向移動検出装置、高さ検出装置、ナビゲーション装置、プログラム、および携帯無線電話端末装置
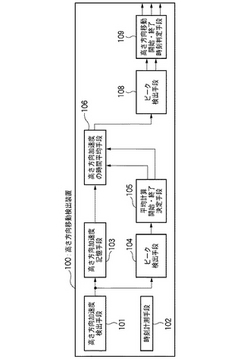
【課題】個人差、体調、床の状態、等によって影響を受けずに、また端末装置の計算負荷や必要な記憶容量を大きくせずに、歩行物体の高さ方向の移動を検出すること。
【解決手段】高さ方向移動検出装置100は、人、物、および動物等を含む歩行物体の歩行に伴う高さ方向の加速度を検出する高さ方向加速度検出手段101と、検出された加速度と関連付けるための時刻を計測する時刻計測手段102と、検出された加速度のピークを検出する第1のピーク検出手段104と、検出されたピークに基づく所定期間を歩行の周期として、当該歩行の周期における加速度の時間平均を計算する時間平均手段106と、計算した加速度の時間平均のピークを検出する第2のピーク検出手段108と、そのピークに基づいて、高さ方向の移動開始時刻と移動終了時刻、およびその高さ方向の移動の向きが上下どちらであるかを検出する高さ方向移動開始・終了時刻判定手段109と、を備える。
(もっと読む)
車両用ナビゲーション装置及び道路地図配信システム

【課題】車両が地図データにない道路を走行した場合に、その走行軌跡を高精度に求め、また、その走行軌跡に基づいて、実際の道路形状に近似した道路データを作成すること。
【解決手段】位置検出器1からの信号に基づいて算出される自車位置の位置情報、及びマップマッチング処理によって自車位置を道路上の位置に修正したマップマッチング位置の位置情報がメモリに記憶される。これら自車位置及びマップマッチング位置に関する位置情報を用いて、自車両が地図データに記憶されている記憶道路を逸脱した地点、及び記憶道路に復帰した地点を決定する。この結果、車両が記憶道路を逸脱してから記憶道路に復帰するまでの走行軌跡を高精度に求めることができる。その走行軌跡に基づいて、実際の道路形状に近似した道路データを作成できる。
(もっと読む)
位置情報送信装置、位置情報受信装置、位置情報交換方法、位置情報交換プログラム、及び位置情報交換システム
【課題】少ないデータ量で効率良く、正確で処理負荷のかからない位置情報交換を行うこと。
【解決手段】送信側装置100の形状データ作成部104は、マップマッチング部102または経路探索部103から受信側装置110に対し送信したい位置情報、例えば、経路データ109や地図データ108等が入力すると、それらのデータの始点の座標データを形状データの開始データとして、その始点から終点に向かってチェックをしていき、一定のルールを満足する分岐点がある場合には、その分岐点の座標データを形状データとする。そして、送信データ作成部105が形状データを含む送信データを作成し、データ送信部106が送信する。受信側装置110では、データ受信部111が送信データを受信して、マップマッチング部112が、その形状データと、地図データ115とを用いてマッチング処理を行うことにより、位置情報を特定して復元する。
(もっと読む)
車両用ナビゲーション装置及び記憶媒体
【課題】 住所入力検索の操作性を向上させるとともに、所望の地点を的確に設定可能にする。
【解決手段】 電話番号入力モード及び階層的な住所データを備えたリストの中から選択して入力を行う住所入力モードを備え、各入力モードによる入力で地点設定し、案内を行う車両用ナビゲーション装置において、前記電話番号入力モードにより入力された電話番号の局番に対する住所データを検索し、該検索された住所データの階層からの住所入力モードに切り替えるようにしたものである。
(もっと読む)
ナビゲーション装置
【課題】 測位誤差の補正精度を高めることができる「ナビゲーション装置」を提供すること。
【解決手段】 ナビゲーション装置は、複数のGPS衛星から送信される電波を受信して測位位置を出力するGPS受信機2と、GPS受信機2による今回の測位タイミングにおける測位位置が含まれる予測誤差範囲を設定する誤差範囲設定部12と、今回の測位タイミングにおいてGPS受信機2から出力された実際の測位位置が予測誤差範囲に含まれるときに実際の測位位置を用い、実際の測位位置が予測誤差範囲に含まれないときに、実際の測位位置と予測誤差範囲との相対的な位置関係に基づいて測位位置の補正を行う相対位置判定部14および位置補正部16とを備えている。
(もっと読む)
ナビゲーション装置
【目的】自動二輪車などの旋回時のロール角が大きな移動体の位置を精度良く求めるこ
とができ、ジャイロセンサの学習機能の構築が容易なカーナビゲーション装置を提供する
。
【構成】ナビゲーション装置10は、移動体1に設置されるとともにジャイロセンサに
よって前記移動体1の旋回角速度ωを検知・算出する旋回角速度検知・算出手段18を備
えており、特に、この旋回角速度検知・算出手段18は、移動体1の正立状態における上
下方向(X軸方向)及び前後方向(Y軸方向)に対して左右方向(Z軸方向)において、
上下方向のX軸に対して互いに逆方向に同一角度θ1、θ2(θ1=θ2=θ0)傾けて
左右対称に設置された同感度の2つのジャイロセンサ2A、2Bと、2つのジャイロセン
サ2A、2Bのセンサ出力回路9、9と、センサ出力回路9、9の出力信号の変化x1、
x2から移動体1の旋回角速度ωを算出する演算手段と、を備える構成である。
(もっと読む)
ナビゲーション方法及びナビゲーション装置
【目的】誘導経路に沿って存在するアクセス可能な興味ある場所(POI)を柔軟に発見する「ナビゲーション方法及びナビゲーション装置」を提供することである。
【解決手段】目的地への誘導経路に対して所定の探索範囲内に存在するユーザ指定のPOIを探索し、該所定探索範囲内に存在するPOIを検出して表示する。また、POIへの容易なアクセスを可能にする地理的条件が成立するか否か判定し、該地理的条件が成立するならば探索範囲を拡大し、その拡大された探索範囲内に存在するユーザ指定のPOIを検出して表示する。
(もっと読む)
ナビゲーション装置への特定経路情報の伝送
車両用ナビゲーションシステムは、ユーザーが、規定の目的地まで計算された経路に影響させる入力を提供することを許容する適応ルーティングモジュール(210)を有する。ナビゲーションサーバー(102)により実行されるルート計算モジュール(204)は、出発地点から目的地までの第1経路を計算可能である。ナビゲーションサーバー(102)により実行される適応経路計算(204)は、ユーザーが該第1経路のユーザー修正を入力することを許容可能である。ユーザー修正はユーザーによって入力され、目的地までの第2経路は、該ユーザー修正の関数として計算される。該第2経路はその後、車両用ナビゲーションシステムに伝送される。 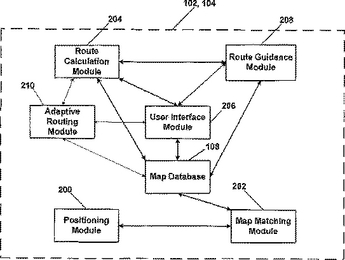 (もっと読む)
(もっと読む)
車両の制御装置
【課題】 走行経路情報の検出精度に対応して車両の挙動をきめ細かく制御することの可能な車両の制御装置を提供する。
【解決手段】 人工衛星からの電波を受信機で受信することにより、車両の走行経路情報を検出する走行経路情報検出装置と、前記走行経路情報に対応して設定された制御パターンに基づいて前記車両の挙動を制御する挙動制御装置とを備えた車両の制御装置において、前記人工衛星からの電波を受信する受信機の受信信号が異常であるか否かを判断するとともに、前記車両が受信機による電波受信に不適当な場所を走行中であるか否かを判断することにより、前記走行経路情報検出装置により検出される走行経路情報の検出精度を検出する精度検出手段(ステップS11〜S14)と、前記走行経路情報の精度に基づいて前記制御パターンを変更する制御パターン変更手段とを備えている。
(もっと読む)
移動体案内装置
【課題】カーナビゲーション装置などの移動体案内装置の位置検出誤差に起因した誤認識を補正できるようにして正確な経路案内を行なえるようにする。
【解決手段】車載端末装置により有料道路の出入口に設けられる自動料金収受用の通信装置と通信を行なうと、ナビゲーション装置において、車載端末装置により料金収受処理を行なった有料道路の出入口の情報を利用することができる。これにより、現在位置を特定する際にどちらの有料道路かといった判定や有料道路か一般道路かの判定が困難となる場合でも、料金収受の履歴情報に基づいて確実且つ正確に現在位置の特定をすることができるようになる。
(もっと読む)
マーク付き迂回路を使用する交通障害周辺のルート計算法
マーク付き迂回路を用いて交通事故を回避できるように動作可能であるルート計算モジュール(図2の204)を備える車両ナビゲーション・システム(図1の100)。ナビゲーション・システムは、移動目的地までのルートに沿って発生し得る交通事故をシミュレートするために用いられるシミュレーション・モジュール(212)を備えている。迂回路モジュール(214)を用いて、ルートに沿って発生し得る交通事故を回避する複数のマーク付き迂回路が計算される。ルートに沿って交通事故が発生すると、ルート計算モジュールは、マーク付き迂回路を含む道路のみを検索して、交通事故を迂回する代替的なルートを決定する。 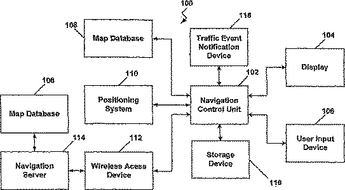 (もっと読む)
(もっと読む)
地図表示装置、記録媒体及び地図表示方法
【課題】 遠近地図上に建造物を立体的に見やすく表示でき、位置の確認が容易にできるようにする。
【解決手段】 建造物を立体的に表示する地図表示装置において、ユーザにより建造物の高さ情報を入力する入力手段1と、2次元座標及び高さ情報を有する建造物データを格納する情報記憶手段3と、該情報記憶手段に記憶された2次元座標及び高さ情報に基づいて建造物を遠近地図上に立体的に描画する描画制御手段14と、該描画制御手段により描画された建造物を表示する表示手段6とを備え、描画制御手段14は、入力手段1により入力された高さ情報に基づいて描画する建造物を選択し、建造物を立体的に表示しても地図が煩雑になることなく、ユーザにとって目立つ建造物を選択して表示する。
(もっと読む)
音響経路情報を有するナビゲーションシステム
所定到達点までの経路概要をなす音響経路情報を提供できるナビゲーションシステム100。このナビゲーションシステム100は、走行到達点までの経路を計算することのできる経路計算モジュール204を含む。経路に基づく経路概要リストを作成するため、経路概要モジュール212を含む。経路に関連付けられた経路概要リストに関連して少なくとも1つの音響経路概要メッセージを生成するため、音響メッセージモジュール214を用いる。 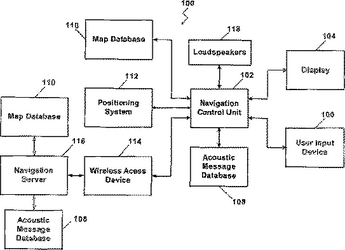 (もっと読む)
(もっと読む)
車載ナビゲーション装置
【課題】案内経路に関する案内情報の効果が薄くなることを防止し、運転者への経路案内の確実性を向上させること。
【解決手段】スピーカ等からなる音声出力部60が設けられている。案内対象から現在位置の方向への所定距離手前の案内地点に車両が到達した場合に、音声出力部60を介して、案内対象に関する音声案内メッセージが出力される。そして、この案内地点から他の案内地点及び案内対象の地点のいずれか一方に車両が達するまで、再報知条件が成立する場合には、運転者が音声案内メッセージの内容を忘れないように、音声出力部60が案内対象に関する音声案内メッセージが再出力される。この結果、運転者に対して音声案内メッセージの内容を強く意識させることができる。これにより、案内経路に関する案内情報(音声案内メッセージ)の効果が薄くなることを防止し、運転者への経路案内の確実性を向上させることができる。
(もっと読む)
項目検索装置
【課題】 使用者の所望する繁華街を適確に効率よく検索することが可能な項目検索装置を提供する。
【解決手段】 繁華街に関する繁華街情報を取得する繁華街情報取得手段と、繁華街の検索条件を設定する検索条件設定手段と、検索条件に基づいて繁華街情報のうちから所望の繁華街を検索する繁華街検索手段と、を有することを特徴とする項目検索装置として提供可能である。
(もっと読む)
車両の制御装置
【課題】 走行経路情報の検出精度に対応して車両の挙動をきめ細かく制御することの可能な車両の制御装置を提供する。
【解決手段】 車両の走行経路情報を検出する場合に、各種のセンサの信号から検出される前記車両の走行軌跡と、情報記録媒体に記憶されているデータとを比較して、車両の現在位置を補正するマップマッチングを実行する走行経路情報検出装置と、走行経路情報に対応して設定された制御パターンに基づいて車両の挙動を制御する挙動制御装置とを備えた車両の制御装置において、マップマッチングの実行による車両の現在位置の補正が完了しているか否かを判断することにより、走行経路情報検出装置により検出される走行経路情報の検出精度を検出する精度検出手段(ステップS11,S12,S13)と、走行経路情報の精度に基づいて制御パターンを変更する制御パターン変更手段とを備えている。
(もっと読む)
画像取得システム
【課題】 所望位置の状況を現在時点の実写画像として取得することができる画像取得システムを提供する。
【解決手段】 車両の現在位置を移動電話機19から情報センター21に送信する。情報センター22は各車両の現在位置をIPアドレスと共にデータベース24に蓄積する。車両の移動電話機19から画像取得希望位置を情報センター22に送信すると、情報センター22は画像取得希望位置近くにいる車両をデータベースから検索して該当車両のIPアドレスを画像取得希望の車両に送信する。画像取得希望の車両から画像希望位置近くの車両のIPアドレスに画像送信を希望する旨の要請を送信すると、その車両に搭載された撮影カメラ1で撮影した画像が移動電話機19から要請元の車両に送信される。
(もっと読む)
オブジェクトの将来の動きを予測するための装置および方法
車輌等のオブジェクトの将来の動きを予測するための装置を提供する。GPSレシーバ(6)等の場所および時刻決定システムは、車輌の地理的な場所および現在の時刻を決定し、プログラムメモリ(2)を有するコンピュータ(1)等のプロセッサにこれを提供する。プロセッサは、定期的に場所および時刻を記録し、車輌の観察記録を生成する。プロセッサ(1,2)は、記録に含まれる以前に記録した観察と、最近の観察にかかるシーケンスとを比較し、一致するシーケンスを検出する。一致するシーケンスとは、所定の最小距離にわたって一致を示す行路区分である。プロセッサ(1,2)は、一致するシーケンスに続くいくつかの観察を検索し、これらから例えば車輌の採りそうな将来のルートや目的地等の将来の動きを予測する。 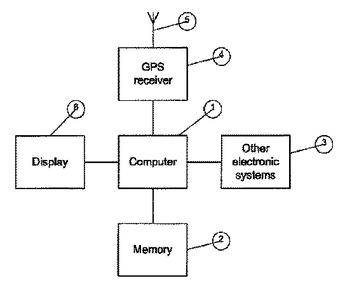 (もっと読む)
(もっと読む)
移動端末装置及び地図データ管理方法
【課題】 移動体の過去の移動実績に基づき複数の移動ルートの中から移動に最も適した移動ルートを選択し、選択した移動ルートを適切に通知する。
【解決手段】 衛星受信部103が測位情報をGPS衛星より受信するとともに測位情報を補正するための補正情報を準天頂衛星から受信し、測位部104が測位情報及び補正情報を用いて移動体の所在位置を高精度に測位し、通行時間計測部111は移動体がルート選択対象区間を通行する度に移動ルート(車線)ごとに通行時間を計測し、予想通行時間算出部112は通行時間計測部111により計測された通行時間に基づき、移動ルートごとに予想通行時間を算出し、移動ルート選択部114は複数の移動ルートの中から予想通行時間が最も短い移動ルートを選択し、表示部106又は音声出力部115は移動ルート選択部114により選択された移動ルートを通知する。
(もっと読む)
運転支援装置および運転支援方法
【課題】自車両の走行経路上の地点に関する情報を、ドライバが実際の映像と対応付けて直感的に把握できるように表示させる。
【解決手段】車両のフロントガラス下部に横長に表示手段1を設置して、自車両の進行方向に沿った道路上で自車両の現在位置から所定距離以内に存在する地点に関する地点情報を、表示制御手段5の制御により表示手段1上に表示させる。表示制御手段5は、自車両の現在位置と表示対象となる地点との位置関係に基づいて、ドライバの視点位置を基準として表示対象となる地点が実際に存在する方位を推定し、その方位と重なる表示手段1上の位置を地点情報の表示位置として決定する。
(もっと読む)
1,981 - 2,000 / 2,006
[ Back to top ]