
Fターム[2F129BB57]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正方法 (4,075) | 入れ替え (140)
Fターム[2F129BB57]に分類される特許
121 - 140 / 140
測位システム及び測位方法
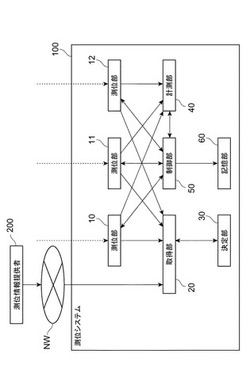
【課題】屋内、交通機関の車両内、屋外における高層ビル間、または狭い路地における場所等においても自位置をより正確に測位することが可能な、測位システム及び測位方法を提供する。
【解決手段】測位システム100は、当該測位システム100の自位置に関する位置情報を含む、互いに異なる生成方法により生成された測位情報を取得する取得部20と、取得部20により取得された複数の測位情報に基づいて、自位置を決定する決定部30と、測位情報を生成する複数の測位部10,11,12とを備え、取得部20は、複数の測位部10,11,12各々により生成された測位情報を取得し、決定部30は、取得部20により取得された複数の測位情報に基づいて、自位置を決定する。
(もっと読む)
移動体のナビゲーション装置及び移動体の現在位置算出方法

【課題】 マルチパスの影響を排除することで、より高い精度で現在位置を検出することが可能な移動体のナビゲーション装置及び移動体の現在位置算出方法を提供する。
【解決手段】 ナビゲーション装置10を備える車両の現在位置算出方法として、車両の現在位置を検出するための自律航法センサ5と制御部17とからなる自律測位手段が新たに算出した自律測位データの誤差範囲を、新たな現在位置の予測エリアデータとして算出するステップと、車両の現在位置を検出するためのGPS受信部4が新たに算出したGPS測位データが、予測エリアデータに含まれるかどうかを判定するステップと、GPS測位データが予測エリアデータに含まれないと判定した場合に、自律測位データを利用して現在位置を示す現在位置データを新たに算出するステップとを有する。
(もっと読む)
周辺施設検索装置
【課題】ユーザが施設の行き易さを容易に把握することができる周辺施設検索装置を得ることを目的とする。
【解決手段】進行方向検出部5により検出された進行方向を含む一定の角度範囲内に存在する施設の中で、現在位置検出部4により検出された現在位置から最も近い位置に存在する施設を起点にして、一定幅の施設検索エリアPを渦巻状に設定し、施設検索処理部10により検索された施設を施設検索エリアP内に配置する施設配置処理部11を設け、その施設配置処理部11により施設検索エリアP内に配置された施設のうち、渦巻きの内側に存在する施設ほど、推奨順位が高い施設として提示する。
(もっと読む)
屋内位置追跡方法及び屋内位置追跡システム
【課題】他のノードの位置を測定する際に、アンカーノードの位置情報の入力を省略する。
【解決手段】移動しつつ3つの仮想アンカー位置を設定し、3つの仮想アンカー位置に基づき相手端末機と近距離側位通信を行って相手端末機の位置を追跡する移動端末機210と、移動端末機210から近距離側位通信を通じて3つの仮想アンカー位置に対する位置情報を受信し、移動端末機210と近距離側位通信を行って移動端末機210との距離情報を送受信する近距離側位装置220とを含む。また、3つの仮想アンカー位置は、GPS衛星から受信するGPS位置情報やPNS機能により特定する。
(もっと読む)
ナビゲーションシステム、音声データ配信方法、経路探索サーバおよび端末装置
【課題】 携帯電話などの端末装置を利用するナビゲーションシステムにおいて、通信負荷を増大することなく、また、記憶容量の制約があっても効率的に音声データを扱うことができるようにする。
【解決手段】 出発地と目的地までの案内経路を端末装置20に配信する経路探索サーバ30を含むナビゲーションシステム10であって、経路探索サーバ30は、端末装置20に配信する音声データを単位音声データに分割し、単位音声データごとに識別符号を対応付けて蓄積した音声データベース318を備え、端末装置20から要求されたデータを配信する際に音声データを付加する必要がある場合、配信データに識別符号を付加して端末装置20に配信し、端末装置20は配信された識別符号を記憶し、音声出力が必要になった際に当該識別符号に基づいて経路探索サーバ30に該当する単位音声データの配信を要求する。
(もっと読む)
現在位置算出装置
【課題】電波航法による計測を行えない期間の経過後に、より適正に現在位置を算出することのできる「現在位置算出装置」を提供する。
【解決手段】前回以前に最後にGPS受信機4から測位データを取得した回nに出力した現在位置Fnから、回nにGPS受信機4で求めた移動方向θ1と、今回n+mにGPS受信機4で求めた移動方向θ2の平均として求まる方向に、回nにGPS受信機4で求めた移動速度Vnと今回n+m、GPS受信機4で求めた移動速度Vn+mの平均として求まる速度で、回nから今回n+mまでの経過時間分移動した位置を今回の予測位置Cn+mとして算出し、その周囲に予測範囲Bn+mを設定する。そして、今回GPS受信機4で求めた測位位置が、予測範囲内に含まれる場合には、当該測位位置を現在位置として出力し、そうでない場合には、予測位置を現在位置として出力する。
(もっと読む)
経路誘導ナビゲーション装置及び経路誘導ナビゲーション方法
【課題】
進行方向を検出することなく目的地まで移動体を誘導する経路誘導ナビゲーション装置及び経路誘導ナビゲーション方法を提供する。
【解決手段】
移動体の移動距離を求め、経路探索によって求められた目的地までの経路データ上で、移動距離だけ移動した位置を移動体の位置として求める。
【効果】
方向検知に伴う誤差の影響を受けない経路誘導ナビゲーションが可能である。
(もっと読む)
位置標定可用性を増加させるための手続
位置決定を行うために使用される方法論を所望の測位精度を達成することに関連して動的に変化させることを可能にする装置、方法およびシステムが提供される。 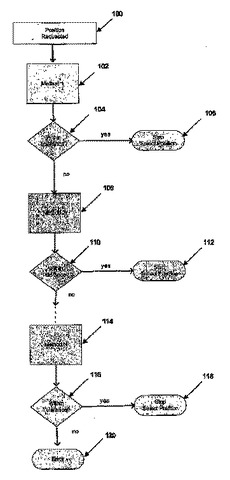 (もっと読む)
(もっと読む)
ナビゲーションシステム、マッチング方法、経路探索サーバおよびナビゲーション端末装置
【課題】 ナビゲーション端末装置の現在位置を道路上に補正するためのマッチング処理を正確に行う。
【解決手段】 ナビゲーションシステム10は、衛星航法手段212、自律航法手段213、マッチング処理手段215、地点記憶手段219、測位手段選択部214を備えている。分岐ノードを通過した後の走行距離を自律航法手段213から取得し、分岐ノードから分岐する各リンク毎に当該リンク上の前記走行距離に基づく移動体の推定位置を示す地点情報を地点記憶手段219に記憶し、測位手段選択部214は、所定の選択条件に従って衛星航法手段212または自律航法手段213の測位出力の何れかを選択し、マッチング処理手段215は、自律航法手段213が選択された場合は自律航法手段測位結果から移動体の進行方向を判別し、地点記憶手段219を参照し、進行方向に合致するリンク上の推定位置の地点をマッチング位置として選択する。
(もっと読む)
ナビゲーションシステム、ナビゲーション装置及びナビゲーション用プログラムを記録した記録媒体
【課題】GPSの利用が困難な地域において、目標地点まで移動するためのナビゲーションシステム、ナビゲーション装置及びナビゲーション用プログラムを記録した記録媒体を提供する。
【解決手段】ナビゲーションシステムは、GPS受信機と測量機器3とコンパスデータ処理装置4とからなる。コンパスデータ処理装置4の表示部8には、地図情報Zが表示されるとともに、座標データが既知の任意の目標地点Gと開始地点Sとが設定される。そして、開始地点S又は当該開始地点Sを基に既知点となった所定地点と、現在地点との相対位置関係(距離データ及び方位角データ)を取得するといった、いわゆるコンパス測量の手法により、現在地点の座標データを算出し、これを基に目標地点Gまで移動するためのナビゲーション情報を表示する。
(もっと読む)
迷子・誘拐防止システム
【課題】従来の発明では、特定の施設内での誘拐防止にとどまっており、広範囲での迷子・誘拐防止には貢献しないものであり、また誘拐が発生した状態を自動判定することが出来ないために、誘拐が発生したことを認識するまでに時間がかかってしまうため、被害者を救出するまでに多くの時間を費やす結果を招きやすくなっていた。
【解決手段】本発明は、無線通信手段、位置検出手段、状態判定手段17、警報発令手段18を供えた携帯移動体通信端末1をサービス対象者(子供や高齢者)に所持させ、保護者移動体通信端末2、システムサーバ3、ローカルサーバ4、絶対位置情報送信手段5を連携させることによって、迷子及び誘拐事件早期認識、解決のための支援システムを提供し、更に誘拐事件等を未然に防ぐことを可能にしている。
(もっと読む)
測位システム、測位端末、測位端末の制御方法、測位端末の制御プログラム、測位端末の制御プログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】屋内においても短時間かつ低消費電力で測位端末が位置通知を行うことができる測位システム等を提供すること。
【解決手段】部屋の出入り口に設置され、使用者が出入り口を通過する際に建物位置情報と入退室情報をICカードに書き込む建物位置情報提供装置と、建物位置情報を格納するICカードと、測位システムであって、測位端末のICカード探索手段が、位置要求があったときに読み取り可能なICカードを探索し、読み取り可能なICカードが発見され入退室情報が使用者が入室中であることを示している場合は、測位端末の位置通知手段は、ICカードから建物位置情報を読み出して位置要求プログラムに通知し、その他の場合は、測位端末の位置通知手段は、位置算出手段により算出した位置を位置要求プログラムに通知することを特徴とする測位システム1。
(もっと読む)
ナビゲーション装置
【課題】 地図データ上に存在しない高速道路上を走行中に、誤って付近の一般道路にマップマッチングしてしまうことを防止することができ、ひいては、自車位置のずれを抑えることができ、ユーザに対して違和感なく自車位置を呈示することができる「ナビゲーション装置」を提供すること。
【解決手段】 自車位置が地図データにおける高速道路21上から外れた場合に、自車の速度が判定基準速度以上の速度であるか否かを判定し、前記自車の速度が前記判定基準速度以上の速度であれば、マップマッチング処理を停止すること。
(もっと読む)
ナビゲーションシステム、その制御方法及び制御プログラム
【課題】ナビゲーションの技術において、加速度センサから得る加速度値の累積値と、GPSによる位置データの変化量から求める車速との対照データの利用により、GPS衛星電波の不十分な場合でも、車両ECUとの配線接続や車速信号無しで車速を高精度に推測すること。
【解決手段】累積部11は、車両の加速度又は加速度に対応する値を加速度値として取得し、その累積値を算出する。車速算出部12は、GPSで得る位置の変化量に基き車速を算出し、記録部13は、同じ時点における前記累積値と前記車速との各組を対応付けて対照データDとして記憶メディア部5に記録する。推定処理部14は、前記GPSにおける衛星電波の受信状態が不十分な場合に、現時点における前記累積値をもとに、対照データDを参照し同じ累積値又は近い累積値に対応付けられた車速により、現時点の車速を推定する。
(もっと読む)
ナビゲーション装置およびナビゲーション方法
【課題】マップマッチング機能を備えたナビゲーション装置において、地図データが更新されていないエリアを車両が走行している時に、車両の位置を正確に表示する。
【解決手段】最新の地図データに更新されているエリアを走行している時には、通常のマップマッチング処理を行い、最新の地図データに更新されていないエリアを車両が走行している場合には、マップマッチング処理の利用度を低下させるとともに、GPS受信機1による自車位置の検出精度を向上させる。これにより、車両の位置を正確に表示することができる。
(もっと読む)
高度算出装置及びナビゲーション装置
【課題】 DSRCによる情報受信に連動させて、地図データベースから絶対的な高度を取得可能にする。
【解決手段】 ナビゲーション装置1が記憶する地図データベース20には、有料道路のETC装置が併設された料金所の位置における緯度、経度及び高度の値が含ませてある。ナビゲーション装置1は、位置検出処理部6で3Dジャイロセンサー4で検出した内容及び車両側接続コネクタ5を通じて車両から取り出した車速パルス信号等を用いて現在の位置における高度を算出可能にしている。また、ナビゲーション装置1はETC信号受信機3でETC信号を受信した場合、受信した場所から近傍となる料金所を地図データベース20から特定し、その特定した料金所の高度の値を絶対的な高度として取得し、算出した高度を絶対的な高度に基づき補正する。
(もっと読む)
測位装置およびそれを用いる位置情報システム
【課題】 携帯電話の端末装置や携帯情報端末に組込まれるなどして、使用者によって所持され、GPS測位を行うとともに自律測位も併用するようにしたセキュリティ端末において、常に良好な測位結果を得られるようにする。
【解決手段】 GPS受信手段11およびGPS測位手段12によるGPS測位結果と、自律測位測位手段13による自律測位結果とを、制御手段15が選択的に採用して、無線通信手段14から通信ネットワーク2を介してセンター装置3へ送信するセキュリティ端末1において、前記制御手段15は、GPS測位を行う度に、GPS測位結果と自律測位結果とから、それぞれに予め設定されるエラー値判断基準に基づき、より正確と推定される方の測位結果を、前記自律測位手段13の初期位置に設定する。したがって、逐次更新され、しかもGPS測位結果をそのまま採用する訳ではなく、初期位置精度を向上できる。
(もっと読む)
航法装置、航法システム、航法測位方法、および車両
【課題】 搬送波差分型全地球測位システム(GPS)受信機とレーザスキャナを有する自律陸上用車両(AGV)のための水平航法システムを提供する。高精度の車両航法システムは先進AGVに強く求められている。高性能のRTK−GPS受信機によっても高い測位精度は得られるが、高い建物やその他の障害物により遮蔽された環境下では、その性能は著しく低下する。
【解決手段】 本発明の航法システムによれば、こうした苛酷な環境下であっても、正確なGPS測位に必要なデシメートルレベルの測位精度が得られる。水平航法システムは低価格の光ファイバージャイロ(FOG)と精密なオドメータから成る。航法誤差は密結合の拡張カルマンフィルタ(EKF)を使用して推定する。EKFの測定値としては二周波数GPS受信機からの二重差分型符号と搬送波位相及びレーザスキャナ測定から生じる相対位置がある。
(もっと読む)
地図表示装置及び地図表示方法
【課題】よりサービス性に富んだ位置情報管理システムを提供する。
【解決手段】携帯端末11は、GPSによる位置測定、携帯電話またはPHSの基地局による位置測定、電波マーカー33による位置測定、及び方向検出器20による自立的位置測定と複数の位置測定手段を有しており、どのような場所でもナビゲーションを行うことが出来るようになっている。携帯端末11からは、同じく携帯端末11を有している第3者の位置をセンターシステム10に問い合わせることにより知ることが出来、徘徊老人や子ども、スキー場でのスキーヤーの行動監視等を行うことができる。携帯端末11には、所持者がよく使う地域の地図データのみがコンパクトに保持されており、この地図データにない地域に行ったときは、センターシステム10から対応する地データをダウンロードして使う。
(もっと読む)
位置測位装置を有する移動体情報端末
【課題】 CPUの負荷に応じて測位部を選択し、CPU負荷の分散、軽減を図る。また、場面に応じて必要とする測位精度の測位部を選択する。
【解決手段】 GPS測位部20は、第1測位部21と第2測位部22とを備える。第1測位部21は準天頂衛星から高精度測位情報を受信し、高精度測位情報に基づき、第2測位部22よりも精度の高い高精度測位方式で測位する。第2測位部22はGPS単独測位を行なう。切替部24は2つの測位部を選択的に切り替える。切替部24は、判定部30が出力する判定信号に従い測位部を切り替える。判定条件設定部33は判定条件を設定し判定条件信号として選択判定部34に出力する。選択判定部34は入力した判定条件信号と車速検知部90等から入力される判定対象信号81等に基づきどちらの測位部を選択するかの判定を行う。選択判定部34は判定結果を判定信号として切替部24に出力する。
(もっと読む)
121 - 140 / 140
[ Back to top ]