
Fターム[2F129BB57]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正方法 (4,075) | 入れ替え (140)
Fターム[2F129BB57]に分類される特許
41 - 60 / 140
ナビゲーション装置、ナビゲーション方法及びナビゲーション機能付携帯電話機
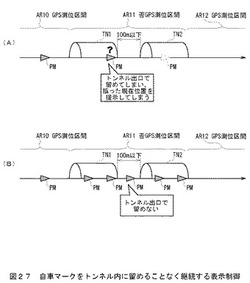
【課題】本発明は、GPS信号を受信できない環境下においても移動体の現在位置を高精度に通知できるようにする。
【解決手段】本発明は、GPS信号に基づいて現在位置を測位し、現在位置を示す自車マークPMを周辺地図に重ねて表示し、現リンクに対する次リンクの属性情報を読み出し、当該次リンクに対して衛星信号の受信感度が悪いと想定されるエリアであると判断した場合、現リンクから次リンクへ移った後はGPS信号に基づく現在位置を用いるのではなく、自律的に推測した現在位置に従って自車マークPMを止めることなく周辺地図に表示し続けるようにする。
(もっと読む)
ナビゲーション装置

【課題】地図と実写映像との関係を分かりやすく表示できるナビゲーション装置を提供する。
【解決手段】地図データを保持する地図データベース5と、現在位置・方位を計測する位置方位計測部4と、計測された位置の周辺の地図データを地図データベースから取得し、該地図データから地図を用いた案内図である地図案内図を生成する案内表示生成部13と、前方を撮影するカメラ7と、カメラで撮影された前方の映像を取得する映像取得部8と、取得された映像から実写映像を用いた案内図である実写案内図を生成する映像合成処理部14と、地図案内図上の所定の地点に対応する実写案内図上の地点を決定する対応地点決定部16と、決定された2地点を結ぶ図形を生成する対応表示生成部17と、地図案内図、実写案内図および2地点を結ぶ図形を1画面内に表示するべく決定する表示決定部15と、表示決定部による決定にしたがって表示を行う表示部10を備えている。
(もっと読む)
ナビゲーション装置
【課題】見やすい実写映像を表示できるナビゲーション装置を提供する。
【解決手段】前方を撮影するカメラ7と、カメラで撮影された前方の映像を取得する映像取得部8と、経路誘導矢印を常に映像取得部で取得された映像の上部に重畳させた映像を生成する映像合成処理部14と、映像合成処理部で生成された映像を表示する表示部10を備えている。
(もっと読む)
道路上位置更新方法及び装置
【課題】自立航法やGPS航法で演算した現在位置の演算誤差や、道路データの誤差等によって、地図の道路上に表示する自車位置が不適切な移動表示を行うことのないようにした「道路上表示方法及び装置」とする。
【解決手段】車両の現在位置を演算して、その現在位置に対応する道路上の自車位置を投影法マップマッチングにより演算し、更にはその位置から現在位置が移動した距離の分だけ道路上の自車位置を移動して地図の道路上に表示するとき、現在位置の走行方位と現在位置に対応する道路の方位との差が所定角度以上、または自立航法による現在位置と道路上の位置との距離が所定以上、或いはGPS航法による現在位置と道路上の位置との距離が所定以上になったときには、道路上の位置表示を道路が形状が大きく変化する形状リンク点以上は移動させずに停止し、所定以下になったときに移動させる。
(もっと読む)
自律測位プログラム、自律測位装置および自律測位方法
【課題】高精度かつ低負荷の自律測位を実現すること。
【解決手段】車両101は、搭載した自律測位装置100によって、内蔵されたセンサから検出した移動距離および回転角に関する情報を利用して自律測位をおこなう。また、自律測位装置100は、車両101が道路に配置された光ビーコン102(102−1〜102−n)を通過することによって、光ビーコン102の配置場所を基準地点として位置情報を取得することができる。位置情報は、経緯度、高度といった基準地点の絶対位置を表す。したがって、自律測位装置100は、自律測位結果と、位置情報とを連動させることによって、正確な移動軌跡を特定することができる。
(もっと読む)
車両位置推定システム
【課題】GPS信号が受信できない環境下においても確実な位置検出を安価に実現できる技術を提供する。
【解決手段】車両位置推定システムは、位置情報が埋め込まれた画像マーカーと、GPS信号を受信して自車両を特定する車両とから構成される車両は、カメラと、画像認識手段と、位置推定手段を備える。画像認識手段は、カメラによって撮影された画像を解析し、画像マーカーの検出およびデコードを行って、画像マーカーに埋め込まれた位置情報を取得する。位置推定手段は、通常はGPS信号に基づいて位置推定を行うが、GPS信号を受信できない場合には、画像認識手段によって取得された画像マーカーの位置情報に基づいて自車両の位置を推定する。
(もっと読む)
ナビゲーション装置
【課題】センサフュージョンに利用するセンサが増えた場合であっても、現在地の推定に必要な計算量が低く抑えられたナビゲーション装置を提供する。
【解決手段】ROM34には、種々の状況において各センサに与えられる重みが設定された特性テーブルが記憶されている。CPU31は、現在地の推定処理を行った後、推定された現在地、地図データ、および実行中の処理などの情報を特性テーブルに当てはめ、各々のセンサの重みを算出する。4つのセンサ22a〜22dのうち、重みが所定のしきい値よりも小さいセンサは、CPU31が制御するスイッチ群32により遮断され、CPU31への検出値の出力が行われなくなる。その結果、CPU31はこのセンサを現在地の推定に利用しなくなる。
(もっと読む)
マルチメディアデータを用いて位置を管理する移動端末及びその方法
【課題】イメージなどのマルチメディアデータに位置情報(緯度/経度情報)や地名情報を移植して活用することのできる移動端末及びマルチメディアデータを用いた位置管理方法を提供する。
【解決手段】マルチメディアデータを画面に表示する表示部と、前記表示部に表示された前記マルチメディアデータとマッチングする位置情報を獲得するためのGPS衛星信号を用いた位置追跡方式を選択するモード選択部と、前記モード選択部にて選択された位置追跡方式によってユーザ位置を追跡して前記位置情報を獲得するユーザ位置追跡部と、前記位置情報を前記マルチメディアデータとマッチングして格納する格納部とを含む移動端末。
(もっと読む)
位置検出装置およびプログラム
【課題】GPS測位不能な電車乗車時でも現在走行している場所がどの駅とどの駅の間に位置しているのかを検出する位置検出装置を実現する。
【解決手段】本装置を携行したユーザが乗車する電車が発車すると、発車時刻と乗車駅名とに基づき時刻表経路検索データベース110を参照して乗車中の電車の路線名を検索すると共に、検索された路線における乗車駅以降の各停車駅毎の駅間距離を取得する。そして、走行中に計測される加速度データに基づきユーザが乗車する電車の移動距離(駅からの移動距離)を算出して地図表示し、発車した電車が駅に停車する毎に、発車駅から停車駅までの距離を時刻表経路検索データベース110から得られる駅間距離に書き換えて位置検出の誤差を補正する。この結果、GPS測位不能な電車乗車時でも現在走行している場所がどの駅とどの駅の間に位置しているのかを検出できる。
(もっと読む)
トンネル内取締機対応の道路交通情報受信装置
【課題】トンネル内の取締機に対して高価なジャイロセンサ等のシステムを用いることなく安価な加速度センサだけで対応できて交通事故を防止に寄与する道路交通情報受信装置を提供する。
【解決手段】GPSモジュールから位置および速度データを受信し位置登録データメモリから現在位置に対応した道路交通情報を得て制御を行うCPUと、前記道路交通情報を聴覚的または視覚的に運転者に報知する報知部と、を備え、さらに位置登録データメモリの中にトンネル情報を登録し、加速度センサを備え、GPSモジュールから受信しなくなったトンネルでは、トンネル情報と加速度センサからのデータをハイパス・フィルタを介して用いて自車の位置と車速を算出し、トンネル内の取締機の警告をするようにした。
(もっと読む)
ナビゲーション装置
【課題】経路履歴として記憶した経路よりも所要時間または距離が短い優位な最適経路探索を効率的に行って報知するとともに、経路履歴の記憶容量を抑制する。
【解決手段】走行経路の情報を所定数記憶する経路情報DB16bと、経路情報DB16bに記憶された走行経路データが所定数以上に達した場合、各走行経路が通過したノードのうち一定割合以上共通に通過したノードを抽出し、抽出した共通ノードを最も多く含む走行経路データを代表経路として選定し保存し、選定しなかった走行経路データを削除する代表経路選定手段17と、経路探索手段12により代表経路の出発地点と目的地点までの最適経路を探索し、探索された最適経路を比較経路として代表経路と比較する経路比較手段18と、を有し、経路比較手段18は両経路を比較し、比較経路が代表経路よりも優位である場合、比較経路の存在をユーザーに報知する。
(もっと読む)
合流退出判定装置及び合流退出判定プログラム
【課題】GPS信号が受信できない状況にある場合であっても合流又は退出の判定を適切に行なうことができる区間を拡大し、利便性を向上させる。
【解決手段】GPS信号に基づく第一自車位置情報P1と走行軌跡に基づく第二自車位置情報P2とに基づいて自車位置を特定する自車位置特定手段12と、自車位置特定手段12により特定された自車位置に基づいて、二本の道路の接続地点における合流又は退出を判定する合流退出判定手段17と、自車両がGPS信号を受信可能な感応区間を走行中には合流退出判定手段17に判定処理を実行させるとともに、不感応区間を走行中には合流退出判定手段17に判定処理を禁止させる判定制御手段20と、自車両が不感応区間を走行中であっても、第二自車位置情報P2に関する条件を含む所定の許可条件を満たす場合には、合流退出判定手段17に判定処理を実行させる特別制御手段24と、を備える。
(もっと読む)
車両用地図データ更新装置
【課題】道路状況の変化を迅速且つ適切に地図データに反映させて車両制御を行なうこと。
【解決手段】地図データが記憶された記憶装置と、自車両の現在位置を特定する現在位置特定手段と、前記現在位置特定手段により特定された自車両の現在位置を用いて前記地図データを参照し、前記地図データにおいて予め定められている複数の特定地点の一つに自車両が接近しているか否かを判定する接近判定手段と、該接近判定手段により前記複数の特定地点の一つに自車両が接近していると判定された場合に、所定の観測期間において入力された車速の平均値が所定値以上であることを含む所定条件を満たす場合に、前記自車両が接近している特定地点を前記地図データから削除するように前記記憶装置を制御する特定地点削除手段と、を備える車両用地図データ更新装置。
(もっと読む)
車載器
【課題】車両がGPS信号を受信できない場所を通過した直後の画面上での自車位置の修正を高精度に行う車載器を提供すること。
【解決手段】地図の各区間の道路に属性情報を付して記憶した属性情報記憶手段と、属性情報に基づき、自車に近接するGPS信号の受信ができない非受信区間を検知する非受信区間検知手段と、自車に近接する非受信区間が検知された場合に、GPS衛星の捕捉状態を監視するGPS衛星捕捉監視手段と、GPS衛星捕捉監視手段により検知されるGPS衛星の捕捉が無い期間中に、自車が移動した距離を自律航法による測位に基づき計算する移動距離計算手段と、移動距離計算手段により計算された距離と、非受信区間検知手段により検知された非受信区間の地図上の距離に基づき、該非受信区間を通過した自車の画面上における位置を修正する自車位置修正手段とを有する車載器を提供する。
(もっと読む)
ナビゲーション装置
【課題】ユーザが所望する施設情報を自動的に画面に表示させることができるナビゲーション装置を提供する。
【解決手段】施設データを含む地図データを記憶する地図データベース20と、スクロールの指示に基づき描画の中心位置を指定する表示中心指定部32と、この指定された描画の中心位置から一定距離の範囲に存在する施設データを地図データベースから探索する施設データ探索部33と、探索された施設データを解析して施設の統計情報を生成する探索情報解析部34と、生成された統計情報を含むサブウインドウを表示するための表示データを生成する探索情報表示部35と、描画の中心位置を中心とする地図を表示するための表示データを生成する地図表示部36と、地図表示部からの表示データに基づき作成された地図上に、探索情報表示部からの表示データに基づき作成されたサブウインドウを重ねて表示させる地図生成部22を備えている。
(もっと読む)
経路探索装置、経路探索方法、経路探索プログラムおよび記録媒体
【課題】右左折する交差点を見逃したり、間違えたりすることを回避すること。
【解決手段】取得部102によって取得された移動体の位置に関する位置関連情報に基づいて、算出部103によって、移動体の現在地点の位置情報を算出する。つぎに、精度判定部104によって、移動体の現在地点の位置情報の精度が悪いと判定された場合、範囲判定部105によって位置精度低下範囲を判定する。そして、探索部106によって、位置精度低下範囲を脱出してから所定距離を道なりに移動する経路を探索する。
(もっと読む)
車載用ナビゲーション装置
【課題】指定された目的地が盗難多発施設であるとき、目的地である施設と同種別であり且つ盗難多発施設ではない施設を検索したのち目的地から最も近い施設を代替施設として特定し、目的地である施設と代替施設との距離差に応じて種々の処理を行う。
【解決手段】指定された目的地が盗難多発施設であることを検出すると、施設データを参照して目的地と同種別の施設であり且つ盗難多発施設ではない施設を検索し、該検索した施設のうち目的地から最も近い施設を代替施設として特定し、該特定した代替施設と目的地との距離差が所定距離以上であれば、該目的地が盗難多発施設である警告を前記出力手段を介して出力し、距離差が所定距離以下であれば、特定した代替施設を新たな目的地として設定する。
(もっと読む)
GNSS受信装置及び測位方法
【課題】マルチパスの影響を低減し、測定精度を向上させること。
【解決手段】GNSS衛星から送信される測位信号に基づいて測位演算を行うGNSS受信装置は、当該GNSS受信装置が同一のGNSS衛星からの測位信号を捕捉した状態において、直接波と反射波との間で位相差が生じるように配置される複数のアンテナと、同一のGNSS衛星からの測位信号に含まれるコードを用いて、該GNSS衛星と当該GNSS受信装置との間の擬似距離を求める擬似距離計算部と、各擬似距離の差分を求める擬似距離差分計算部と、該差分に基づいて、前記GNSS衛星からの測位信号がマルチパスの影響を受けていることを判定する判定部と、GNSS衛星からの測位信号以外の情報に基づいて、当該GNSS受信装置の位置を推定する位置推定部と、マルチパスの影響を受けていると判定された場合に、前記位置推定部により推定された位置情報を出力する位置情報出力部とを有する。
(もっと読む)
携帯ナビゲーション装置
【課題】GPS電波が届かない場所でも使用でき、歩行者の現在位置を正確に表示できる携帯ナビゲーション装置1を提供する。
【解決手段】
ナビゲーション開始位置において、ユーザが進行予定方向に携帯端末3を向けて方向設定ボタンを押圧する進行方向設定操作を受け付けて、その操作時における携帯端末3の方位をユーザの進行予定方向として記憶する進行方向記憶手段32aを備える。また、保持状態における、携帯端末3が向く方位を携帯保持方向として記憶する保持方向記憶手段32bを備える。さらに、ユーザの歩数を検出する歩数検出手段21を備える。また、進行予定方向と携帯保持方向との関係から、ユーザの進行方向を検出する進行方向検出手段23を備える。そして、予め記憶されたユーザの歩幅と、歩数と、ユーザの進行方向とから、ユーザの現在位置を算出し、地図情報とともに表示する。
(もっと読む)
移動要素に剛結合された3軸加速度計の連続的な位置により形成された経路の特徴を決定する装置および方法
移動要素(EM)に剛結合された3軸加速度計(3A)の、前記3軸加速度計(3A)の第1の静止時点(t0)と前記第1の静止時点(t0)に後続する第2の静止時点(tn)との間における連続的な位置により形成された軌跡の特徴を決定する装置であって、前記装置が更に、地球基準座標系に結合された固定グローバル基準座標系(GF)内で、前記第1および第2の静止時点(t0,tn)の間で実質的に一定であるベクトル場のベクトルを測定する追加的な3軸センサであって前記移動要素(EM)に剛結合されていると共に加速度計(3A)の基準座標系内で固定されている追加センサと、制御手段(CMD)とを含んでいる。 (もっと読む)
41 - 60 / 140
[ Back to top ]