
Fターム[2F129CC31]の内容
航行(Navigation) (246,646) | 入力/登録 (21,334) | 入力/登録の種類 (15,618) | 静止画 (320)
Fターム[2F129CC31]の下位に属するFターム
航空写真、衛星写真 (16)
Fターム[2F129CC31]に分類される特許
1 - 20 / 304
携帯端末及び情報表示方法
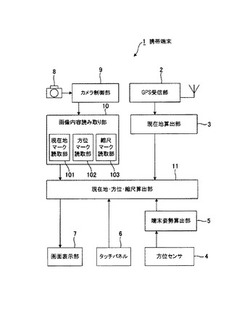
【課題】ネットワーク上の外部サーバにアクセスするための専用のインフラ設備を要することなく、容易に且つ低コストでフロアマップのデータを取得することができる携帯端末及び情報表示方法を提供すること。
【解決手段】カメラ8が施設内に設けられたフロアマップを撮影し、画像内容読み取り部10は、撮影されたフロアマップの画像に含まれるマークを読み取って画像情報及びマークに関する情報を出力し、現在地・方位・縮尺算出部11は、画像情報及びマークに関する情報に基づいて現在地、方位及び縮尺をそれぞれ決定し、決定した現在地、方位及び縮尺に基づく表示情報を生成し、画面表示部7は、現在地・方位・縮尺算出部11で生成された表示情報を表示する。
(もっと読む)
ナビゲーション装置、ナビゲーションシステム、制御方法、ナビゲーション方法およびプログラム

【課題】速度が異なる乗り物でナビゲーション装置を使用する場合であっても、移動速度に応じた適切なナビゲーションを行う。
【解決手段】地図上で再生される音声ファイルの指向性を示すベクトル情報を含む音声ファイル情報を記憶管理する情報処理装置と通信可能な撮像部を備えるナビゲーション装置であって、位置情報取得部により取得した現在位置情報を送信する送信手段と、前記撮像部を起動して撮影画面を表示部に表示する撮影画面表示手段と、前記送信手段で現在位置情報を送信した情報処理装置から前記ナビゲーション装置の現在位置情報周辺で再生可能な音声ファイルに含まれるベクトル情報を取得する取得手段と、前記音声ファイルに含まれるベクトル情報の指向性を用いて、表示部に表示可能か否かを判定する第一の判定手段と、前記第一の判定手段で前記ベクトル情報が表示部に表示可能であると判定された場合、前記撮影画面に前記ベクトル情報を表示する表示手段とを備えることを特徴とする。
(もっと読む)
事故解析装置、事故解析方法、および、プログラム
【課題】自動車のような移動体において、事故解析になるべく適した画像を、より簡易な方法によって得る技術を提供することを目的とする。
【解決手段】車両に設置された事故解析装置(6)は、当該車両について複数方向からみた車体画像を記憶する記憶部(67)と、当該車両の周辺を撮像する撮像部(10)と、当該車両と物体の接触位置および接触方向を特定する接触特定部(66)と、接触特定部(66)で特定された接触位置および接触方向に応じて、当該車両と物体の接触状況が視覚化される仮想視点からみた車体画像を記憶部(67)から選択する選択部(66)と、撮像部(10)で撮像された周辺画像を、その仮想視点からみた座標の画像に変換する座標変換部(63)と、座標変換部(63)で座標変換された周辺画像と、選択部(66)で選択された車体画像と、を合成して保存する合成部(64)と、を備える。
(もっと読む)
顔向き検出装置
【課題】検出精度の向上及び演算負荷の低減の少なくとも一方につながる新たな顔向き検出装置を提供する。
【解決手段】顔向き検出装置12は、特徴部抽出手段24により抽出された複数の特徴部の中から人物100の鼻孔124を抽出する鼻孔抽出手段24を有する。鼻孔抽出手段24は、複数の特徴部のうち最も移動量の大きい特徴部を鼻孔124として抽出する。
(もっと読む)
情報処理システム、情報処理装置、及びセンターサーバ
【課題】撮影エリアが限定されることなく、容易に移動体を撮影することが可能な情報処理システム、情報処理装置、センターサーバを提供する。
【解決手段】車載カメラ4を有する撮影実行車両2Bも用いて、被撮影車両2Aの撮影を実行している。すなわち、被撮影車両2Aは、他車両である撮影実行車両2Bに撮影を行ってもらうことができる。撮影実行車両2Bは、路側カメラ3とは異なり、あらゆる位置に移動可能であるため、撮影エリアは限定されることなくあらゆるエリアでの撮影が可能となる。また、センターサーバ1と通信可能で車載カメラ4などの撮影部を有する車両であれば、どのようなものであっても撮影実行車両として機能させることができる。すなわち、路側カメラ3を別途設置する場合と異なり、既に道路を走行している多数の車両をそのまま撮影実行車両として機能させることができるため、容易に撮影が可能となる。
(もっと読む)
眠気予測装置
【課題】ドライバが過去に車両で通ったことのない移動経路に対しても、ドライバの眠気の状態を良好に予測することのできる眠気予測装置の提供。
【解決手段】図5に例示するように、天候・時間帯・体調・道路パターンの組み合わせに対して、どれだけ継続して走行したら(継続距離)眠気レベルがどう遷移するか(眠気レベル遷移)が対応付けて記憶したデータベースを備えている。ドライバにより天候,時間帯,体調が入力され、ナビゲーション装置により移動経路が検索されてその移動経路の各セグメントの道路パターンが取得されると、データベースから眠気レベルが上昇するデータセットが抽出され、そのデータセットに対応した継続距離に基づいて眠気誘発エリアが予測される。
(もっと読む)
現在位置算出装置および現在位置算出方法
【課題】本発明は、誤差の累積を抑制し、目標物になりそうなものがない単調な道路でも適切に真の現在位置を算出できる現在位置算出装置および現在位置算出方法の提供を目的とする。
【解決手段】本発明にかかる現在位置算出装置は、自車17の現在位置における2次元画像である観測画像が入力される観測画像入力部1と、所定の地点に関連して予め用意された2次元画像である参照画像を管理する、参照画像管理部9と、観測画像と、記憶されている現在位置である仮現在位置に対応する参照画像とを、画像マッチングにより照合する照合部としてのピクセルパターン照合部5と、ピクセルパターン照合部5における照合結果に基づいて、自車17の真の現在位置を算出する現在位置算出部6とを備える。
(もっと読む)
制御システム、車載装置、及びプログラム
【課題】種別が異なる其々の車載装置において、確実に、その機種において利用可能な情報を記憶媒体に記憶することができる制御システム、車載装置、及びプログラムを提供する。
【解決手段】制御システムは、車載装置によって使用されるSDカードがカードスロットに挿入された場合、SDカードに車載装置の種別情報が記憶されているかを判断する。SDカードに種別情報が記憶されている場合、選択画面271を表示部に表示する。ユーザによって、チェックボックス領域274にチェックが入れられ、SDカードに記憶する情報の項目が選択された場合、制御システムは、SDカードに記憶されている種別情報によって特定される車載装置が使用可能な情報を、サーバから取得してSDカードに記憶する。車載装置にSDカードが挿入された場合、車載装置は、SDカードに記憶された情報に基づいて、運転者に情報を報知する。
(もっと読む)
地理的な位置に関するデータを共有するための方法、システム、端末装置、サーバ装置およびプログラム
【課題】ユーザが多数の地理的な位置の中から自分のニーズを満たす地理的な位置を判断することを容易にする手段を提供する。
【解決手段】端末装置11は現在位置を示す位置データとともに、ユーザにより入力されたその位置(スポット)に関するコメントや写真といったスポット情報をサーバ装置12に送信する。それらのスポット情報はサーバ装置12により他のユーザに公開される。スポット情報を登録したユーザは、スポット情報を公開する相手のユーザやそのスポットに対するコメントの書き込みを許可するユーザを指定することができる。また、スポット情報は閲覧するユーザに対し書き込んだユーザ毎に提示されるため、閲覧するユーザは書き込んだユーザのプロフィールなどに基づきその情報の信頼性等を判断することができる。また、スポット情報はフォルダにグループ化されて管理されるため、閲覧するユーザにとってスポット情報の絞り込みが容易である。
(もっと読む)
音声認識装置、音声認識方法、及び音声認識プログラム
【課題】音声認識コマンドの操作性を向上させることができる、音声認識装置、音声認識方法、及び音声認識プログラムを提供すること。
【解決手段】ナビゲーション装置1は、ユーザの発話音声を検出する音声検出部2bと、音声検出部2bにて検出されたユーザの発話音声に基づいて、当該ユーザの発話音声に含まれる音声認識コマンドを特定する音声認識コマンド特定部2cと、音声認識コマンド特定部2cにより特定された音声認識コマンドに対応する所定の制御を実行すると共に、音声認識コマンドを選択してディスプレイ6に表示する音声認識制御部2aとを備える。音声認識制御部2aは、ユーザが使用する可能性が高いか否かを判断する所定の条件に基づいて選択した音声認識コマンドを、ディスプレイ6に表示させる。
(もっと読む)
音声認識装置、音声認識方法、及び音声認識プログラム
【課題】階層化された音声認識コマンドの操作性を向上させることができる、音声認識装置、音声認識方法、及び音声認識プログラムを提供すること。
【解決手段】ナビゲーション装置1は、ユーザの発話音声に基づいて音声認識コマンドを特定する音声認識コマンド特定部2cと、階層構造により階層化された音声認識コマンドの中から、音声認識コマンド特定部2cにより特定された音声認識コマンドに対応する所定の制御を実行する音声認識制御部2aとを備える。音声認識制御部2aは、階層構造に関連付けられ、ユーザに表示すべき音声コマンドとして予め定められた条件により選択された音声認識コマンドである、第1音声認識コマンドと、ユーザが使用する可能性が高いか否かを判断する所定の条件に基づいて選択された音声認識コマンドである、第2音声認識コマンドとを、ディスプレイ6に同時に表示させる。
(もっと読む)
情報処理装置、情報処理方法、プログラム、及び記録媒体
【課題】徒歩時の自律航法に用いられる対応テーブルの精度を向上することのできる情報処理装置、情報処理方法、プログラム、及び記録媒体を提供する。
【解決手段】情報処理装置は、ユーザの絶対位置を取得する絶対位置取得部と、歩行する上記ユーザの歩行テンポを示す第1の値を取得する取得部と、上記絶対位置に基づいた所定距離移動したことをトリガとして、上記ユーザの歩幅又は移動速度を示す第2の値を算出する算出部と、算出される上記第2の値を用いて、上記第1の値及び上記第2の値の対応関係を学習する学習部と、を有する。
(もっと読む)
自車位置認識システム、自車位置認識プログラム、及び自車位置認識方法
【課題】複数の地物で構成された地物群について、画像認識処理における認識対象を決定するための認識率を適切に決定することが可能な技術を実現する。
【解決手段】画像認識処理を行う範囲として認識地物単位毎に設定される認識要求範囲を取得する認識要求範囲取得部27と、地物の種別毎に予め定められた予想認識率ERに基づき認識地物単位毎に認識率を決定する認識率決定部26と、認識要求範囲が互いに重複する複数の認識地物単位の中から認識率に基づき認識対象とする認識地物単位を選択する認識対象選択部25とを備え、認識率決定部26は、道路長さ方向に分かれて配置された地物群からなる特定認識地物単位について、各時点での各地物の画像認識結果に応じて、当該特定認識地物単位を構成する複数の地物の一部が画像認識された場合には当該特定認識地物単位を構成する残りの地物の予想認識率ERに基づき認識率を決定する。
(もっと読む)
ナビゲーション装置
【課題】自車の前方の距離の指標を、実世界との位置関係の把握および地図上の案内ポイントとの位置関係の把握が容易な状態で提示することによって、案内ポイントである交差点における右左折を適切に支援することができる「ナビゲーション装置」を提供すること。
【解決手段】自車の進行先の道路を含む自車の前方の所定の撮像領域を撮像する車載カメラ8と、経路誘導手段22による交差点拡大図の表示に連動して、車載カメラ8の撮像画像に基づく実画像を交差点拡大図と並べて表示する実画像表示手段23と、実画像の表示および交差点拡大図の表示に連動して、実画像および交差点拡大図の双方に、自車に対して第2の所定距離前方の目安となる目安マークを重畳表示する目安マーク表示手段24とを備えたこと。
(もっと読む)
運転支援装置
【課題】複数のセンサを用いて自車両位置を検出するにあたり、精度の劣化したセンサの影響を低減し、精度よく自車両位置を検出する。
【解決手段】運転支援装置1において、自車両位置を検出するGPS2と、自車両の移動速度および進行方向の情報を取得する取得手段5,6と、取得した情報から次の時刻の自車両位置を推定する推定手段と、これらの手段に基づいて自車両位置の検出精度を算出するGPS精度算出部8と、所定の特徴部の位置を記憶する地図データ記憶部7と、該所定の特徴部の位置を認識するカメラ3と、地図データ記憶部7に記憶された該特徴部の位置とカメラ3が認識した位置との照合により自車両位置を検出し、カメラ3の認識環境の変化に基づいて位置検出精度を算出するカメラ精度算出部9と、それぞれの検出精度に基づき自車両の検出位置の採用割合を設定する統合部11とを備え、統合部11は、GPS2とカメラ3のうち検出精度の高い方の自車両位置の採用割合を高く設定する。
(もっと読む)
車両用表示処理システムおよび車両用表示処理方法並びにプログラム
【課題】表示部に表示させたい風景画像をより容易に指示可能とする。
【解決手段】車載カメラにより連続的に撮影された風景画像を取得し、風景画像のそれぞれを撮影時刻に関連付けて画像データDBに記憶させ、風景画像の撮影開始から撮影終了までの撮影時間に対応するタイムバー72と、タイムバー72上の位置をユーザにより指示可能に示すスライダー73と、風景画像を撮影した際の走行経路沿いに存在するランドマークをタイムバー72上の対応する位置にて示すランドマークアイコン74a〜74dと、を含む指示表示画像71をディスプレイに表示させ、さらに、風景画像のうちタイムバー72上のスライダー73の位置に対応する撮影時刻に関連付けられた風景画像をディスプレイに表示させる。これにより、走行経路上のランドマークの時系列的な位置を把握した状態で表示する風景画像を指示可能となる。
(もっと読む)
位置判定装置およびナビゲーション装置並びに位置判定方法,プログラム
【課題】車両の地図上の位置をより適正に判定する。
【解決手段】道路上で走行方向に間隔をもって車載カメラから撮影された風景画像の特徴点を抽出して得られる複数の参照データをそれぞれ対応する撮影位置と関連付けて参照データDB44に記憶しておき、車載カメラから撮影される風景画像と複数の参照データとが一致しているか否かを判定するマッチング処理を行ない、マッチング処理により一致していると判定された参照データに対応する撮影位置に基づいて自車位置を判定するものにおいて、隣接する参照データの道路上の参照データ間隔Dは、道路の幅員が小さいほど短くなるように調整されてなる。これにより、マッチング処理により判定用データと参照データとが一致していると判定される機会を増やすことができる。
(もっと読む)
位置判定装置およびナビゲーション装置並びに位置判定方法,プログラム
【課題】車両の地図上の位置をより適正に判定する。
【解決手段】車載カメラから撮影される風景画像と複数の参照データとが一致しているか否かを判定するマッチング処理により一致していると判定された参照データに対応する撮影位置に基づいて車両の現在位置である自車位置を判定するものにおいて、マッチング処理は、車載カメラから撮影される風景画像に対して特徴点を抽出する所定の画像処理を施して得られる判定用データと参照データとの一致率Mが判定用閾値Mref以上のときに一致していると判定し、一致率Mが判定用閾値Mref未満のときに一致していないと判定することにより行なわれ(S210)、判定用閾値Mrefは、車速Vが大きいほど小さくなるように且つハンドル操舵量Stが大きいほど小さくなるように調整されている(S130)。これにより、判定用データと参照データとが一致していると判定されやすくすることができる。
(もっと読む)
運転支援システム、方法およびプログラム
【課題】交差点が連続する道路において後の交差点に関する案内を適切に実行する技術の提供。
【解決手段】第1交差点と2交差点との間の距離を交差点間距離として取得し、前記第2交差点に関する案内を実行するために前記第2交差点以前にて確保すべき距離を必要距離として取得し、前記第1交差点に到達する前に前記車両に搭載された検出手段によって複数の地物の中の少なくとも1個が検出された場合に前記複数の地物の中のいずれかの地物を基準地物とし、当該基準地物からの走行距離によって前記車両の現在位置を特定し、前記検出手段によって検出された地物の個数に応じた前記基準地物からの走行距離の誤差を誤差距離として取得し、前記交差点間距離が前記必要距離と前記誤差距離との和以上であり、かつ、前記誤差距離に基づいて前記車両が前記第1交差点を通過したと判断される場合に、前記第2交差点に関する案内を実行する。
(もっと読む)
カメラシステム
【課題】カメラシステムのカメラ装置と受信装置の両方にOSDの描画機能が付いていた場合に、システム上で動作させるアプリケーションに応じて、OSDの描画機能のON/OFFを調整する。
【解決手段】カメラ装置は、画像にOSDによる表示要素を描画するOSD描画部と、OSD描画部を制御するOSD制御部とを備えている。カーナビゲーション装置などの受信装置は、OSD描画部と、OSD制御部とを備えており、バックミラーなどの受信装置は、OSD描画部と、OSD制御部とを備えていない。カーナビゲーション装置などの受信装置のOSD制御部は、カメラ装置のOSD制御部に対して、OSD機能をON/OFFを制御するOSD制御情報を送信し、カメラ装置は、それに従ってOSDによる表示要素を重畳した画像をカーナビゲーション装置に送信する。
(もっと読む)
1 - 20 / 304
[ Back to top ]